Известны вилочные захваты для грузоподъемных устройств, у которых вилы выполнены телескопически раздвижными.
Предлагаемый захват отличается тем, что привод для раздвижения вил состоит из тягового каната и двуплечих рычагов с противовесами в нижней части, шарнирно прикрепленных к подвижным элементам вил и несущих блоки для запасовки тягового каната, с помощью которого рычаги приводятся в действие.
Тяговый канат привода вил и канат, к которому эти вилы подвешены, запасованы на блоках рычажно-пружинного устройства, несущего прижим для захватываемого груза, и служат для приведения этого устройства в действие.
Эти отличия позволяют применить захват на кранах.
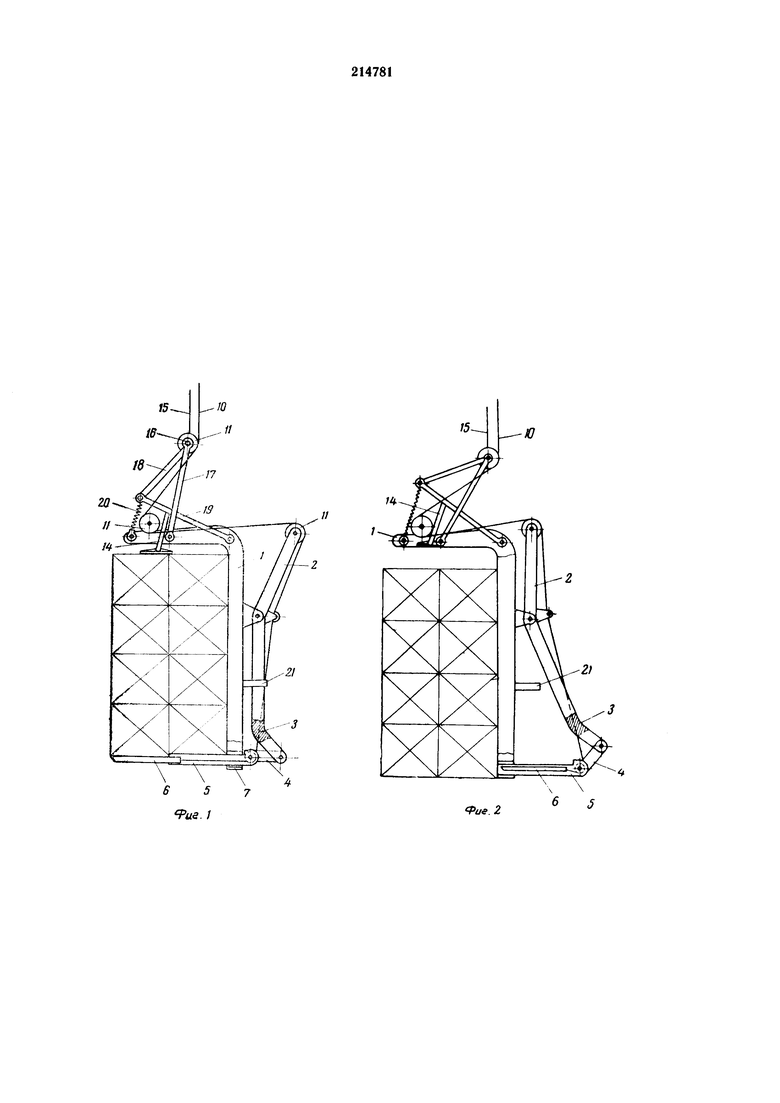
На фиг. 1 изображен общий вид захвата; на фиг. 2 - то же, после загрузки; на фиг. 3 - схема расположения телескопических звеньев вил захвата.
На г-образной стойке 1 шарнирно установлены качающиеся рычаги 2 с противовесами 3. К рычагам 2 шарнирно прикреплены тяги 4, второй конец которого шарнирно соединен с телескопическими звеньями 5 и 6 вил Звено 5 в виде коробки установлено в направляющих 7 стойки 1. Вилы звена 6 соединены между собой поперечиной 8 и перемещаются в направляющих 9 коробчатого звена 5. К поперечине 8 прикреплен тяговый канат 10, проходящий через блоки 11. Канат 12, перекинутый через блок 13 в звене 6, одним концом прикреплен к поперечине 8, а другим - к поперечине стойки 1.
Прижим груза во время транспортировки осуществляется прижимом 14 с приводом от тягового каната 10 и поддерживающего каната 15, закрепленного на оси 16, через систему рычагов 17-19 с пружиной 20 уравновешивающего устройства.
Замок 21 фиксирует положение рычагов 2 во время транспортировки груза.
Работает захват следующим образом.
Захват с выдвинутыми вилами заводится под груз. При подъеме захвата за канаты 15 и 10 рычат 17 поворачивается вокруг нижней оси, перемещая при этом рычаги 18 и 19 и сжимая пружину 20. Одновременно от воздействия рычага 19 выдвигается прижим 14, который прижимает груз к вилам. После транспортировки захват с грузом устанавливается на месте разгрузки.
Канаты 10 и 15 освобождаются от нагрузки, и прижим 14 поднимается. Открывается замок 21. Для разгрузки создается усилие на тяговом канате 10. Под действием тягового усилия звено 6 уходит в звено 5. Одновременно.рычаг 2, поворачиваясь, убирает звено 5 из-под груза до положения показанного на фиг. 2.
Выдвижение звеньев 5 и 6 в рабочее положение происходит под действием противовесов 3 при освобожденном тяговом канате 10.
По окончании выдвижения вил рычаги 2 фиксируются замком 21, и захват снова готов к работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват | 1979 |
|
SU867841A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ВИЛОЧНОГО ПОГРУЗЧИКА | 2010 |
|
RU2547024C2 |
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО НА АВТОФУРГОНЕ | 1969 |
|
SU255064A1 |
| Грузоподъемный кран | 1980 |
|
SU931681A2 |
| Монтажное устройство крана с телескопической башней | 1978 |
|
SU753781A1 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1973 |
|
SU362780A1 |
| Строительный подъемник | 1977 |
|
SU737337A1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1987 |
|
SU1444192A1 |

1. Вилочный захват для грузоподъемных устройств, содержащий телескопически раздвижные вилы, отличающийся тем, что, с целью применения его на кранах, привод для раздвижения вил состоит из тягового каната и двуплечих рычагов с противовесами в нижней части, шарнирно прикрепленных к подвижным элементам вил и несущих блоки для запасовки тягового каната, с помощью которого рычаги приводятся в действие.
2. Захват по п. 1, отличающийся тем, что тяговый канат привода вил и канат, к которому эти вилы подвешены, запасованы на блоках рычажно-пружинного устройства, несущего прижим для захватываемого груза, и служат для приведения этого устройства в действие.
