Известна буровая установка, содержащая подвижную относительно рамы тележку с приводом, включенным в сеть питания через реверсивный золотник, стреловидный манипулятор с рабочим органом и следящее устройство, воспринимающее угловые перемещения манипулятора.
Описываемая установка отличается выполнением следящего устройства в виде гибкой тяги, одним концом закрепленной на манипуляторе, а другим - на золотнике, и наличием блока, взаимодействующего с гибкой тягой и установленного на раме. Это обеспечивает автоматический выход концов шпура на одну плоскость.
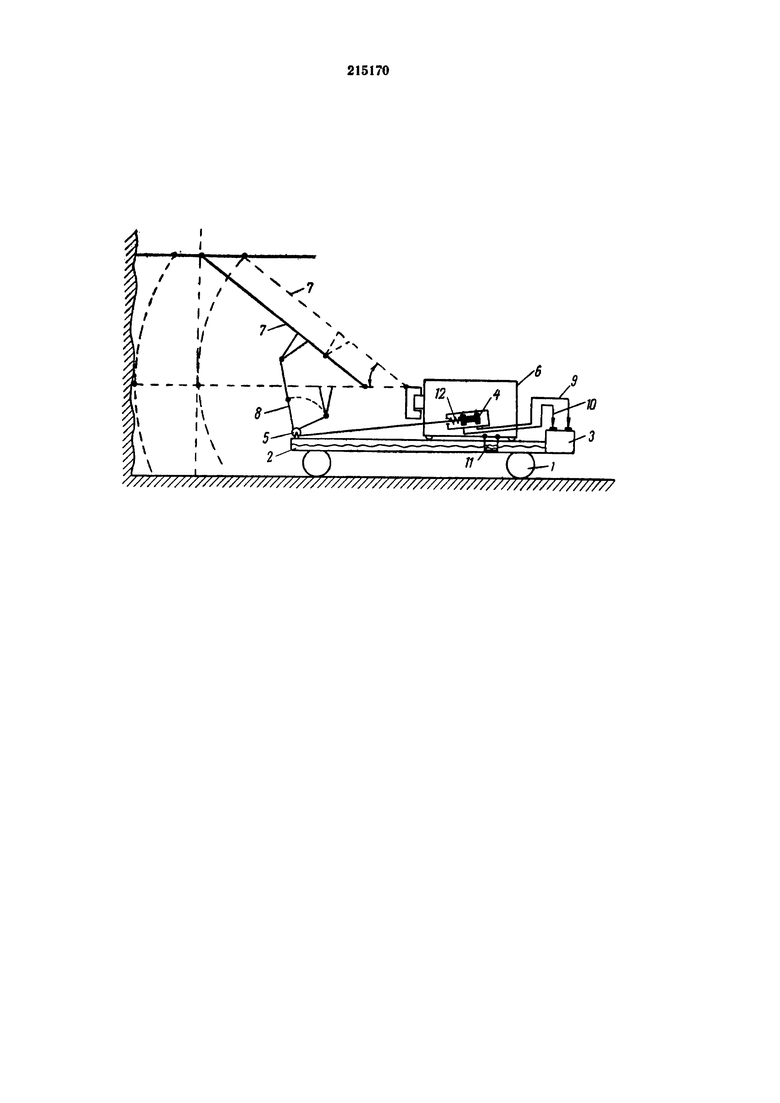
На чертеже изображена принципиальная схема установки.
Она состоит из ходовой части 1, рамы 2, на которой закреплены двигатель 3, питаемый через золотник 4, блок 5 и перемещаемая тележка 6, к которой шарнирно крепится манипулятор 7.
Через блок 5 посредством гибкой тяги 8 он соединен с реверсивным золотником 4, поэтому при перемещении манипулятора передвигается золотник, соответственно открывая магистраль 9 или 10, заставляя двигатель вращаться в разные стороны, чем достигается необходимое смещение тележки 6 посредством механизма перемещения 11. Золотник с одной стороны снабжен пружиной 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ БУРИЛЬНАЯ УСТАНОВКА | 1971 |
|
SU301434A1 |
| Бурильная установка | 1977 |
|
SU848621A1 |
| БУРОВАЯ УСТАНОВКАвсЕсс:о?;-'АЯПАТШ; Ч;Г-Т.-л»*:Ч-:СКАЯ библиотека 1АЬА | 1971 |
|
SU301433A1 |
| Горная машина | 1985 |
|
SU1286765A1 |
| Указатель положения рабочего органа бурильной установки | 1977 |
|
SU734406A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| БУРИЛЬНАЯ УСТАНОВКА | 1969 |
|
SU250819A1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 1998 |
|
RU2172405C2 |
| БУРОВАЯ УСТАНОВКА | 1968 |
|
SU221612A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БУРИЛЬИОЙ УСТАНОВКОЙ | 1973 |
|
SU368395A1 |
Буровая установка, содержащая подвижную относительно рамы тележку с приводом, включенным в сеть питания через реверсивный золотник, стреловидный манипулятор с рабочим органом и следящее устройство, воспринимающее угловое перемещение манипулятора, отличающаяся тем, что, с целью обеспечения автоматического выхода концов шпуров на одну плоскость, следящее устройство выполнено в виде гибкой тяги, одним концом закрепленной на манипуляторе, а другим - на золотнике, и снабжено блоком, взаимодействующим с гибкой тягой и установленным на раме.
