Известен способ автоматической балансировки в полярной системе координат, заключающийся в том, что измеряют и запоминают координаты неуравновешенных масс и удаляют неуравновешенные массы.
Предлагаемый способ отличается от известного тем, что производят двукратную балансировку, первую из которых - черновую - осуществляют с ошибками по углу и величине неуравновешенности, выбранными так, чтобы остаточная неуравновешенность была наименьшей и была бы возможна вторая, чистовая балансировка. Это отличие позволяет повысить точность уравновешивания.
В случае круговой зоны удаления неуравновешенности первую балансировку могут производить с ошибкой либо по углу в любом направлении, либо по величине неуравновешенной массы, которую устраняют с избытком.
В случае двух ограниченных рядом лежащих зон для удаления неуравновешенности (например, смежные противовесы коленчатого вала) неуравновешенные массы можно удалять неполностью, а ошибку по углу вводить таким образом, что наибольшей величины ошибка по углу достигает, если начальная неуравновешенность расположена у краев зоны и равна нулю, если начальная неуравновешенность расположена в центре зоны и направлена всегда от центра зоны.
В случае наличия для удаления неуравновешенности одной и притом ограниченной зоны (например, один противовес коленчатого вала) неуравновешенную массу можно удалить неполностью, а ошибка по углу неизменна по всей зоне и направлена от центра зоны.
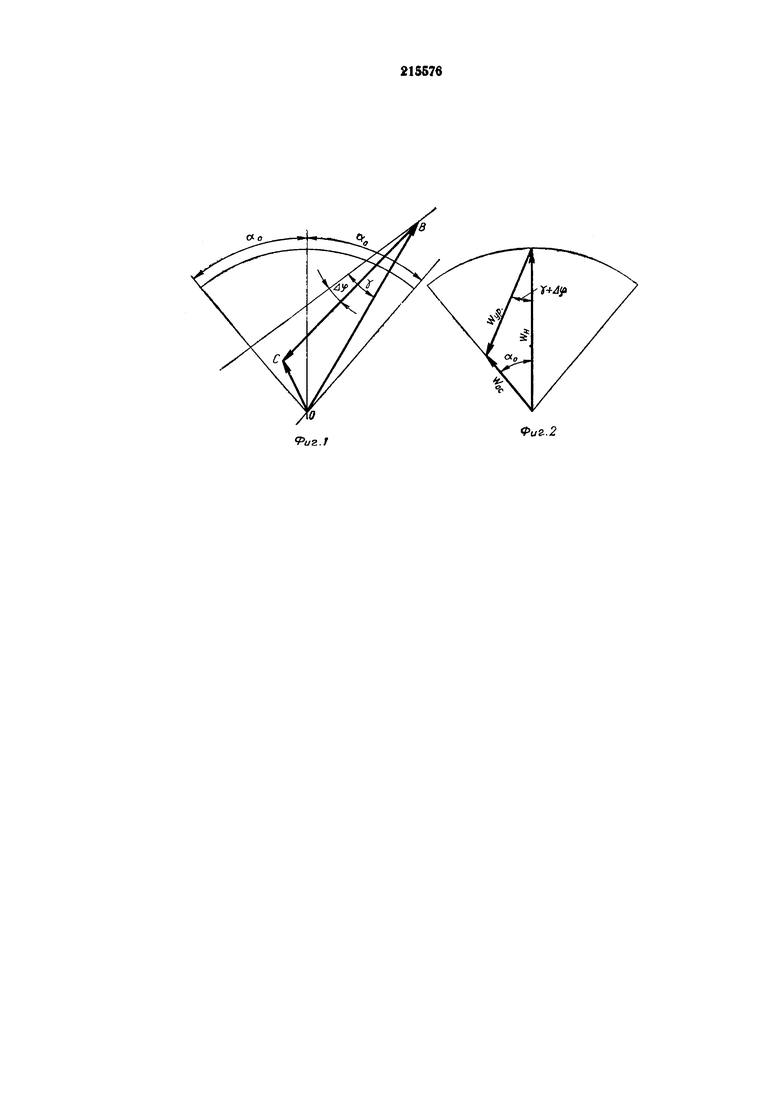
На фиг. 1 и 2 изображены векторные диаграммы для пояснения предлагаемого способа.
Способ заключается в следующем.
Пусть зона допустимого расположения вектора остаточной неуравновешенности  ограничена углом ±α (см. фиг. 2), а балансировочное оборудование обеспечивает измерение направления вектора неуравновешенности с точностью ±Δφ. Вводится систематическая поправка γ на направление уравновешивающего вектора так, что угол между вектором начальной неуравновешенности
ограничена углом ±α (см. фиг. 2), а балансировочное оборудование обеспечивает измерение направления вектора неуравновешенности с точностью ±Δφ. Вводится систематическая поправка γ на направление уравновешивающего вектора так, что угол между вектором начальной неуравновешенности  и уравновешивающим вектором
и уравновешивающим вектором  может составлять γ±Δφ, причем /γ/>/Δφ/.
может составлять γ±Δφ, причем /γ/>/Δφ/.
Кроме угловой коррекции, применяется коррекция по величине так, чтобы с учетом случайной ошибки величина уравновешивающего вектора всегда была меньше величины вектора начальной неуравновешенности. Необходимая величина уравновешивающего вектора может быть вычислена по соотношению, составленному на основании векторной диаграммы (см. фиг. 2):

Здесь Wyp - скалярная величина вектора неуравновешенности;
Wмин - скалярная величина вектора начальной неуравновешенности;
Θ - наибольшая случайная ошибка по величине.
На векторной диаграмме (см. фиг. 2) изображены предельные значения углов и величин, поэтому вектор остаточной неуравновешенности  всегда расположен в заданной зоне.
всегда расположен в заданной зоне.
В зависимости от размеров допустимой зоны для вектора остаточной неуравновешенности и ее расположения относительно допустимой зоны для вектора начальной неуравновешенности выбирается характер и величина систематической поправки по углу.
Если зона для второй балансировки сдвинута относительно зоны первой балансировки, то в этом случае направление угловой поправки не зависит от направления вектора начальной неуравновешенности. Угловая поправка осуществляется посредством сдвига отсчетной шкалы на генераторе опорного сигнала или на исполнительном механизме (в случае автоматов).
Если зона для второй балансировки расположена под тем же углом, что и зона для первой балансировки, то в этом случае направление угловой поправки зависит от направления вектора начальной неуравновешенности, а именно: угловая поправка откладывается в сторону от середины противовеса. При этом желательно, чтобы систематическая угловая поправка была наибольшей на краях противовесов и равной нулю, если вектор начальной неуравновешенности проходит через середину противовеса. Такого типа поправка достигается посредством сложения тока генератора опорного сигнала с током добавочного генератора, ротор которого, так же как и первого генератора, вращается синхронно с изделием.
Если зона для второй балансировки совмещена с зоной для первой балансировки, то требуется, чтобы места сверлении или установки грузов при первой и второй балансировке не совпадали. Для выполнения этого условия поправка должна быть постоянной по абсолютной величине, но должна менять свой знак в зависимости от того, в правой или левой половине зоны оказался вектор начальной неуравновешенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| ИМПУЛЬСНОЕ КОЛЕСО ДВИГАТЕЛЯ | 2016 |
|
RU2719777C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ БАЛАНСИРОВКИ КВАРЦЕВОГО ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2580175C1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
1. Способ автоматической балансировки в полярной системе координат, заключающийся в том, что измеряют и запоминают координаты неуравновешенных масс и удаляют неуравновешенные массы, отличающийся тем, что, с целью повышения точности уравновешивания, производят двукратную балансировку, первую из которых - черновую - осуществляют с ошибками по углу и величине неуравновешенности, выбранными так, чтобы остаточная неуравновешенность была наименьшей и была бы возможна вторая, чистовая балансировка.
2. Способ по п. 1, отличающийся тем, что, в случае круговой зоны удаления неуравновешенности первую балансировку производят с ошибкой либо по углу в любом направлении, либо по величине неуравновешенной массы, которую устраняют с избытком.
3. Способ по п. 1, отличающийся тем, что в случае двух ограниченных рядом лежащих зон для удаления неуравновешенности (например, смежные противовесы коленчатого вала) неуравновешенные массы удаляют неполностью, а ошибку по углу вводят таким образом, что наибольшей величины ошибка по углу достигает, если начальная неуравновешенность расположена у краев зоны и равна нулю, если начальная неуравновешенность расположена в центре зоны и направлена всегда от центра зоны.
4. Способ по п. 1, отличйющийся тем, что в случае наличия удаления неуравновешенности одной и притом ограниченной зоны (например, один противовес коленчатого вала) неуравновешенную массу удаляют неполностью, а ошибка по углу неизменна по всей зоне и направлена от центра зоны.
