Известны автоматизированные устройства для временного хранения различных предметов, например ручной клади, которые состоят из многоярусных стеллажей, разделенных на вертикальные ряды ячеек, каждая из которых снабжена датчиком занятости, электромеханического оператора, представляющего собой раму, смонтированную на расположенных вдоль стеллажей направляющих и несущую подвижную в вертикальном направлении каретку с механизмом подачи и съема предметов, и схемы управления.
Предлагаемое устройство удобно в работе: в нем исключены ошибки при получении хранящихся предметов и конструкция его проще. Это достигается тем, что оно снабжено механизмом кодирования и выдачи квитанций, имеющим перфоратор, и механизмом декодирования квитанции. Механизм подачи и съема предметов выполнен в виде выдвижного вильчатого подхвата, а днища ячеек стеллажей образованы параллельными опорными рейками. Опорные рейки ячеек закреплены.подвижно в вертикальном направлении и использованы в качестве чувствительных элементов датчиков занятости.
Чтобы сократить среднюю продолжительность циклов приема и выдачи предметов, следует обеспечивать загрузку их в ближайший ряд, имеющий свободные ячейки. Для этого система управления должна включать две схемы автоматического поиска. Первая такая схема, предназначенная для поиска свободного места, связана через диодно-матричную схему с датчиками занятости ячеек, а вторая, служащая для поиска ячейки по коду квитанции, - с механизмом декодирования.
Для полного предотвращения злоупотреблений целесообразно снабдить каждую ячейку стеллажа блоком памяти, состоящим из кулачкового механизма, связанного через храповую передачу с подвижными опорными рейками днища ячейки, и группы контактов, управляемых кулачками и связанных через систему управления с перфоратором и механизмом декодирования. В каждой ячейке предусмотрен многоконтактный переключатель, контакты которого связаны попарно с контактами блока, а выходные цепи переключателей всех ячеек соединены с общими точками, объединяющимися по одной из выходных цепей каждого переключателя и связанными каждая с одним реле в системе управления.
Для обеспечения надежности действия устройства и исключения приема предметов, вес или размеры которых не соответствуют принятым нормам, каретка может быть снабжена датчиками положения предметов, щупы которых установлены по ее краями ограничительными упорами, а также датчиками контроля веса по нижнему пределу с чувствительными элементами. Эти элементы выполнены в виде подвижных в вертикальном направлении реек, расположенных между зубьями вильчатого подхвата. Последний приводится в движение через регулируемую фрикционную муфту, исключающую движение подхвата при его перегрузке.
Чтобы сократить продолжительность и упростить декодирование квитанций, целесообразно снабдить систему управления схемой контроля соответствия объема информации и определения адреса предмета, выполненной на сбалансированных двухобмоточных реле.
Для бесперебойной выдачи хранящихся предметов при отключении системы управления устройство может быть снабжено ламповым индикатором состояния блока памяти, с которым соединены многоконтактные переключатели блоков памяти всех ячеек. При этом в устройстве необходимо предусмотреть ручное приспособление для декодирования квитанций.
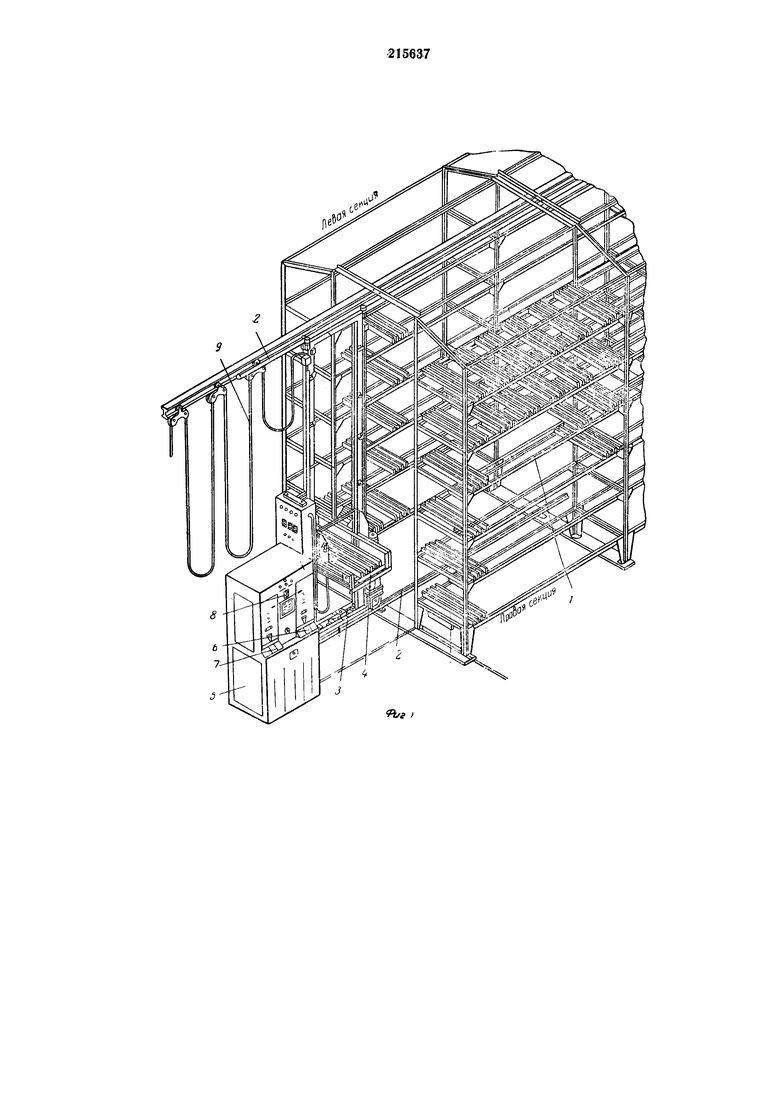
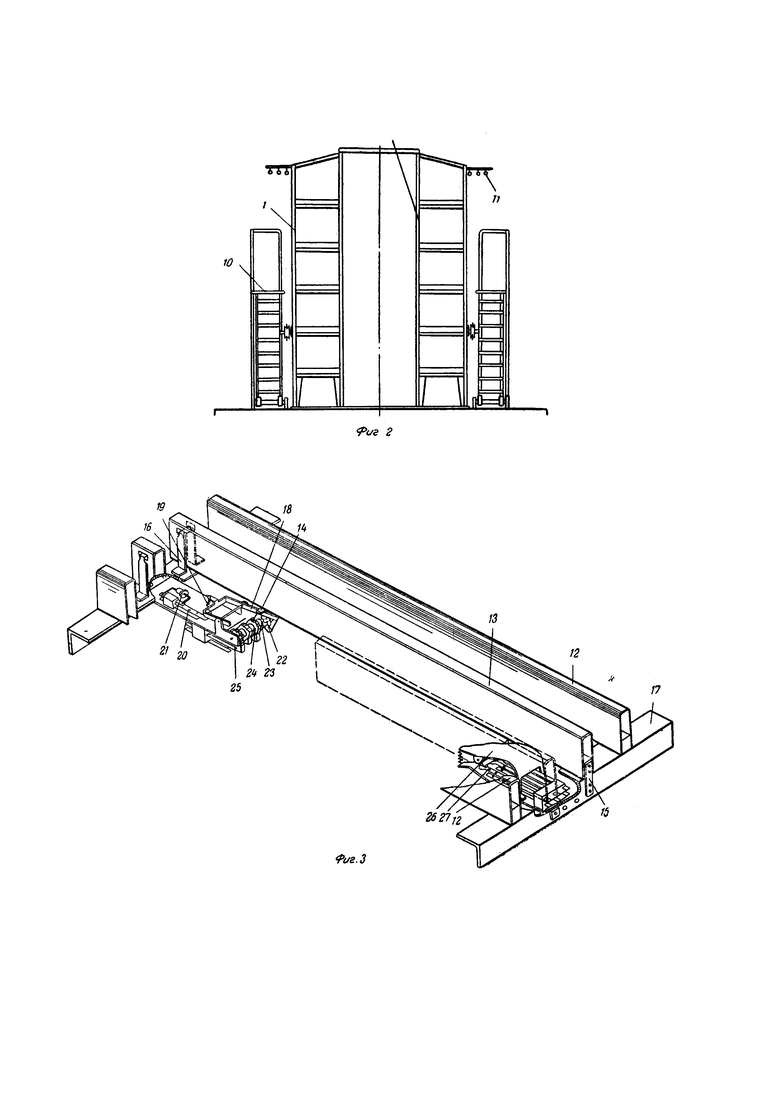
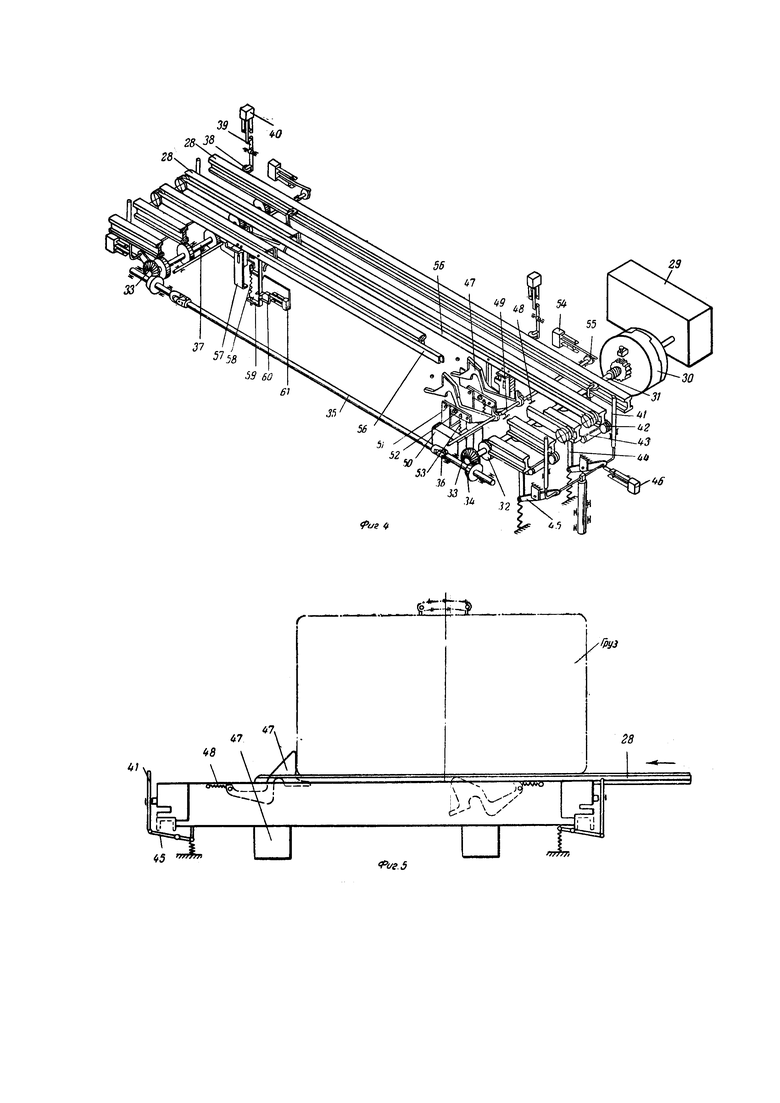
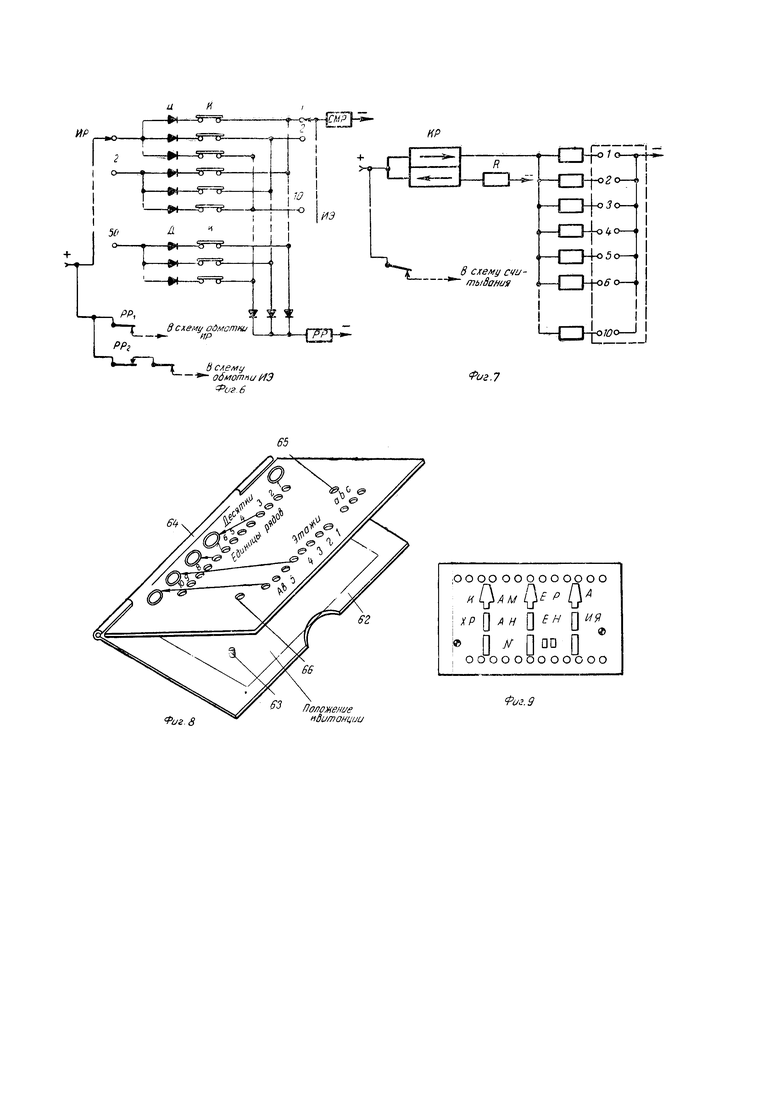
На фиг. 1 изображено предлагаемое автоматизированное устройство (штрих-пунктиром показано основание стенки, отделяющей операционное помещение для пассажиров от собственно кладовой), общий вид; на фиг. 2 - стеллажи с торцовой стороны (электромеханический оператор условно не показан); на фиг. 3 - днище стеллажной ячейки с блоком памяти и многоконтактным переключателем электроцепей; на фиг. 4 - кинематическая схема каретки с механизмом подачи и съема предметов и устройствами контроля; на фиг. 5 - каретка с грузом (показан случай адресования груза на правые стеллажи), вид сбоку; на фиг. 6 - принципиальная электрическая схема поиска ячейки; на фиг. 7 - принципиальная электрическая схема контроля соответствия объема информации, содержащейся на перфоквитанции; на фиг. 8 - ручное приспособление для декодирования квитанций; на фиг. 9 - перфоквитанция (все отверстия условно показаны пробитыми), общий вид.
Автоматизированное устройство для временного хранения различных предметов, например ручной клади, содержит стеллажные ячейки 1, собранные в две секции, внутри которых на направляющих 2 смонтирована рама 3; электромеханический оператор с кареткой 4, шкаф 5 системы управления с размещенными внутри механизмом выдачи квитанции, перфоратором (кодировщиком) 6, механизмом приема и считывания квитанции (де-кодировщиком) 7 и монетным механизмом 8; а также связывающий перечисленные узлы многожильный гибкий кабель 9.
Днище каждой стеллажной ячейки, с внешней стороны которой размещены вспомогательные лестничные тележки 10, а сверху подвешен ламповый индикатор 11, состоит из реек - неподвижных 12 и подвижных 13 в вертикальном направлении с нажимной планкой 14, возвратными пружинами 15 и ограничителями 16 хода, смонтированными на продольных опорах 17. Каждая ячейка снабжена блоком памяти, включающим коромысло 18 с пружиной 19, взаимодействующее с контактом 20, являющимся датчиком занятости ячейки, включенным в систему управления развязывающим диодом 21; и собачкой 22, приводящей в действие храповое колесо 23 и кодирующие кулачки 24. Последние взаимодействуют с контактной группой 25. Кроме того, каждая ячейка имеет многоконтактный переключатель электроцепей, имеющий вид шарнирно установленной подпружиненной крышки 26, несущей кулачок, взаимодействующий с контактной группой 27 (число контактных групп 27 соответствует числу контактных групп 25 в блоке памяти).
Механизм подачи на стеллажи предметов и съема их выполнен в виде вильчатого выдвижного подхвата 28, приводимого в действие электродвигателем (не показан) с редуктором 29 через фрикционную многодисковую муфту 30 и механическую систему. Эта система состоит из ведущего вала 31, цилиндрических шестерен 32, конических шестерен 33 и 34, промежуточного вала 35 с шарнирными муфтами 36 и ведомого вала 37.
Контролируется положение вильчатого подхвата 28 двумя спаренными механизмами. Каждый такой механизм содержит прижимной ролик 38, закрепленный на шарнирно смонтированном рычаге 39, воздействующем на контакт 40. С торцовых сторон вильчатого подхвата смонтированы контрольные датчики для проверки положения предмета на каретке 4 и в стеллажной ячейке 1. Датчики имеют вид вертикального подпружиненного щупа 41, утапливаемого при выдвижении подхватов через систему, состоящую из ролика 42, установленного на шарнирном рычаге 43, тяги 44 и рычага 45, воздействующего на блок-контакт 46.
Кроме того, каретка 4 электромеханического оператора имеет два одинаковых контрольных датчика максимальной длины предметов, принимаемых для хранения. Такой датчик включает ограничительные упоры 47 с противовесами в виде пружин 48, помещенные между зубьями подхвата и посаженные на ось 49. Упоры 47 могут, поворачиваясь на оси 49, подниматься под действием электромагнита 50, передающего усилие к ним при помощи тяговой вилки 51 и рычага 52 с возвратной пружиной 53. Крайние их положения при этом регистрируются контактам 54, который находится под воздействием эксцентрика 55, укрепленного на оси 49.
Минимальный вес принимаемых предметов контролируется весовым датчиком (их всего два), содержащим продольную рейку 56, смонтированную между зубьями подхвата и помещенную в люльку 57, в которой она перемещается в вертикальном направлении под действием пружины 58 и шарнирно-маятниковой тяги 59 с толкателем 60. Последний воздействует на блок-контакт 61.
Система управления автоматизированного устройства состоит из двух схем автоматического поиска стеллажной ячейки. Первая схема три помощи диодно-матричной схемы, реле СМР свободного места, связанного с контактами К датчиков занятости места, и реле РР ряда с контактами PP1 и РР2, входящими в цепи искателя ИР ряда и искателя ИЭ яруса (этажа), осуществляет поиск свободного места па стеллажах и настройку перфоратора механизма выдачи квитанции.
Вторая схема, построенная аналогичным образом, предназначена для поиска занятой предметом ячейки по коду квитанции и связана с механизмом приема и считывания квитанции (декодировщиком) и блоками памяти. Цифры 1, 2, …, 50 соответствуют номерам рядов стеллажных ячеек, а цифры 1, 2, …, 10 - номерам ячеек в каждом ряду. Четные номера ячеек принадлежат одной из секций, а нечетные - второй.
Схема считывания связана с двухобмоточными контрольными реле КР. Это реле своим контактом включено в соответствующий искатель и служит для предотвращения выдачи предметов при нарушении разрядности отверстий информационного кода на квитанции.
На случай выключения приборов автоматики, когда требуется бесперебойная выдача хранящихся предметов, предусмотрено ручное приспособление для декодирования квитанций. Последнее включает основание 62 с одним или несколькими фиксирующими штифтами 63 и связанную шарнирно с ним крышку 64, имеющую соосные со штифтами отверстия 65 и 66 и систему других отверстий, обозначенных и пронумерованных (например, гравировкой) в принятом для кодирования порядке. Взаимное положение (приспособления и квитанции определяют номера рядов, ярусов (этажей) и принадлежность ячеек к правой или левой секции, а также соответствие проверяемой квитанции предмету, находящемуся на хранении в данный момент, - отверстия под буквами а, b, с (по числу кодирующих кулачков 24 и соответствующих им контактных групп 25 блока памяти).
В исходном положении электромеханический оператор с кареткой 4 расположен перед первым рядом стеллажных ячеек 1 против окна приема и выдачи (на чертеже окно не показано), причем вильчатый подхват 28 выдвинут в операционное помещение через окно на уровне или несколько ниже первого яруса ячеек. Система управления готова направить механический оператор к ближайшей свободной ячейке, найденной схемой потока, причем исполнительные органы механизма выдачи квитанций подготовлены для нанесения на квитанцию адреса данной ячейки.
Загружают камеру хранения следующим образом. Предмет (ручную кладь) устанавливают на вильчатый подхват 28 и оплачивают стоимость хранения. Деньги опускают в монетный механизм 8, который замыкает пусковые контакты электродвигателя подхвата, и последний убирается, втягивая груз на каретку 4 и освобождая ролик 42 и рычаг 43, которые через рычажно-пружинную систему поднимают вверх щуп 41. Срабатывает блок-контакт 46, в результате чего каретка 4 поднимается. Пульс-пара (не показана) запускает искатель ИР ряда, а реле РР свободного ряда включает пульс-пару искателя ИЭ яруса. При перемещении оператора происходит счет рядов и ярусов (этажей), т.е. исполняется программа, набранная ранее искателями загрузки и реализуемая схемой совпадения с реле СМР свободного места, которая останавливает каретку с механизмом подачи и съема против выбранного места несколько выше стеллажных реек 12 и 13. Затем выдвигается вильчатый подхват 28 с грузом в ячейку, и каретка приспускается, подхват своими зубьями попадает в промежутки между рейками 12 и 13 и опускается несколько ниже их рабочих поверхностей, оставляя груз на рейках. При этом подвижная рейка 13 опускается и своей нажимной планкой 14 поворачивает шарнирное коромысло 18 блока памяти, которое освобождает замкнутый контакт 20. Вследствие этого обесточивается реле СМР свободного места, подающее сигнал-команду занятия данной ячейки в систему управления. Один из зубьев подхвата 28, освобождаясь от груза, давит на крышку 26, кулачок которой замыкает контактные группы 21 переключателя, подключающие кодовые контактные группы 25 яблока памяти к перфоратору. Перфоратор срабатывает, и пассажиру выдается квитанция. Электромеханический оператор с кареткой 4, убрав подхват 28, возвращается в исходное положение, система управления находит следующую свободную ячейку.
Выдается предмет следующим образом. Вкладывают перфоквитанцию в механизм 7, в результате чего сбрасывается программа загрузки, описанная выше. Затем при помощи схемы с двухобмоточным контрольным реле КР происходит контроль соответствия объема информации, заложенной в программоносителе (квитанции), требуемому объему информации. Если в каждом разряде (номера ряда, яруса или стороны стеллажей) пробито только одно отверстие, то реле КР не возбуждается. При излишних отверстиях или их отсутствии реле возбуждается и выключает дальнейшее считывание. Если объем информации является нормальным, декодируется адрес ячейки (номера ряда, яруса и стороны стеллажей). Искатели разгрузки работают аналогично описанным выше искателям загрузки до тех пор, пока их щетки не установятся на ламелях, соответствующих пробитым на квитанции отверстиям, что фиксируется на реле КР. Последнее возбуждается и останавливает искатель. Подается сигнал на подачу механического оператора с кареткой к ячейке согласно составленной по квитанции программе. При этом каретка останавливается на уровне «своего» яруса, грузовой подхват 28 своими зубьями вдвигается между стеллажными рейками 12 и 13. Один из зубьев подхвата нажимает на крышку 26 переключателя. В результате этого блок памяти данной ячейки подключается к схеме считывания. При совпадении положения контактных групп 25 и соответствующих отверстий (а, b, с) на квитанции каретка приподнимается. Груз освобождает подвижную рейку 13 с планкой 14, коромысло поворачивается, собачка 22 переводит храповое колесо 23 одновременно с кодирующими кулачками 24 в положение, обеспечивающее новую комбинацию посылок для перфорации. Грузовой подхват втягивает предмет на каретку 4, и механический оператор возвращается в исходное положение. Каретка опускается и выдвигает на своем подхвате доставленный груз. После снятия груза, т.е. освобождения весовой рейки 56, все механизмы занимают исходное положение, система управления выбирает ближайшую свободную ячейку.
Для перемещения электромеханического оператора во время ремонта, регулировки, осмотра и т.п. предусмотрено ручное управление. Для чего на операторе расположены соответствующие устройства: подножка, поручни и пусковые кнопки, а также необходимая служебная сигнализация (не обозначены).
Предлагаемое автоматизированное устройство может применяться при хранении различных предметов и грузов на складах, хранилищах, а также на вокзалах в качестве камеры хранения ручной клади и багажа пассажиров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-контрольное устройство для стеллажных складов | 1980 |
|
SU945030A1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Пульт управления работой производственного участка и склада | 1976 |
|
SU618812A1 |
| АВТОМАТИЗИРОВАННАЯ СТЕЛЛАЖНО-КОНТЕЙНЕРНАЯ СИСТЕМА ХРАНЕНИЯ ЦЕННОСТЕЙ И СТЕЛЛАЖНО-КОНТЕЙНЕРНОЕ УСТРОЙСТВО | 1997 |
|
RU2130416C1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ<1 (Т) ПАТЕ^ТЙЗ- <! (^ • ЧI *й i!• -J •.-•!;Yii?7:7rPr'<'С гг; i' -tf ! : *-Лк*1 ?i^='^j-.Ai^*/wтг,лттт1!^ | 1969 |
|
SU244180A1 |
| Транспортно-накопительная система | 1989 |
|
SU1747352A1 |
| Устройство для контроля занятости ячеек складских стеллажей | 1984 |
|
SU1221077A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТОМ МНОГОЯРУСНОГО СКЛАДА ВЫСОКОПЛОТНОГО ХРАНЕНИЯ ЯЧЕЕК С ГРУЗОМ | 2006 |
|
RU2329191C2 |
1. Автоматизированное устройство для временного хранения различных предметов, например, ручной клади, состоящее из многоярусных стеллажей, разделенных на вертикальные ряды ячеек, каждая из которых снабжена датчиком занятости, электромеханического оператора, представляющего собой раму, смонтированную на расположенных вдоль стеллажей направляющих и несущую подвижную в вертикальном направлении каретку с механизмом додачи и съема предметов, и системы управления, отличающееся тем, что, с целью удобства пользования им и предотвращения ошибок при получении хранящихся предметов, а также упрощения конструкции, оно содержит механизм кодирования и выдачи квитанции, снабженный перфоратором, и механизм декодирования квитанций, механизм подачи и съема предметов выполнен в виде выдвижного вильчатого подхвата, а днища ячеек стеллажей образованы параллельными опорными рейками, причем опорные рейки ячеек закреплены подвижно в вертикальном направлении и использованы в качестве чувствительных элементов датчиков занятости.
2. Устройство по п. 1, отличающееся тем, что, с целью сокращения средней продолжительности циклов приема и выдачи предметов путем обеспечения загрузки их в ближайший ряд, имеющий свободные ячейки, система управления включает две схемы автоматического поиска, первая из которых, предназначенная для поиска свободного места, связана через диодно-матричную схему с датчиками занятости ячеек, а вторая, служащая для поиска ячейки по коду квитанции, - с механизмом декодирования.
3. Устройство по п. 1, отличающееся тем, что, с целью предотвращения злоупотреблений, каждая ячейка стеллажа снабжена блоком памяти, состоящим из кулачкового механизма, связанного через храповую передачу с подвижными опорными рейками днища ячейки, и группы контактов, управляемых кулачками и связанных через систему управления с перфораторам и механизмом декодирования, причем в каждой ячейке предусмотрен многоконтактный переключатель, контакты которого связаны попарно с контактами блока, а выходные цепи переключателей всех ячеек соединены с общими точками, объединяющимися по одной из выходных цепей каждого переключателя и связанными жаждая с одним реле в системе управления.
4. Устройство по п. 1, отличающееся тем, что, с целью обеспечения надежности его действия и исключения приема предметов, вес или размеры которых не соответствуют принятым нормам, каретка снабжена датчиками положения предметов, щупы которых установлены по ее краям, и ограничительными упорами, а также датчиками контроля веса по нижнему пределу с чувствительными элементами, выполненными в виде подвижных в вертикальном направлении реек, расположенных между зубьями вильчатого подхвата, причем привод последнего осуществлен через регулируемую фрикционную муфту, исключающую движение подхвата при его перегрузке.
5. Устройство по пп. 1 и 2, отличающееся тем, что, с целью сокращения продолжительности и упрощения декодирования квитанции, система управления снабжена схемой контроля соответствия объема информации и определения адреса получаемого предмета, выполненной на сбалансированных двухобмоточных реле.
6. Устройство по пп. 1-3, отличающееся тем, что, для бесперебойной выдачи хранящихся предметов при отключении системы управления, оно снабжено ламповым индикатором состояния блока памяти, с которым соединены многоконтактные переключатели блоков памяти всех ячеек, причем в устройстве предусмотрено ручное приспособление для декодирования квитанций.
