Изобретение относится к машиностроению, а именно к средствам хранения и транспортирования грузов.
Известны транспортир-накопительные системы, содержащие установленные попарно с проходом между ними стеллажи, кран-штабелер, размещенный на расположенном в этом проходе рельсовом пути и имеющий подвижный вдоль колонны грузоподъемник с опорной платформой под захват для груза.
Недостатком этих систем является узкая специализация грузопереработки на одном типе груза, определяемом конструкцией захвата крана-штабелера.
Известен захват, выполненный в виде установленных на платформе грузоподъемника крана-штабелера вильчатого подхвата и шарнирно-закрепленных на грузоподъемнике с возможностью поворота в горизонтальной плоскости консольных стрел с крюковой подвеской.
Недостатками захвата являются необходимость установки стрел в рабочее положение вручную, узкая специализация захвата для транспортировки длинномерных грузов, низкая эффективность использования производственных площадей в складах оборудованных кранами-штабеле- рами с таким захватом, поскольку вильчатые подхваты требуют расширенного межстеллажного прохода, необходимого для разворота захвата и подачи его в стеллаж наездом крана-штабелера, а также энергеV
V|
СО
ел
ю
тические потери, связанные с необходимостью возить стрелы с крюками, когда используется вильчатый подхват и наоборот вильчатый подхват при использовании крюковой подвески.
Известна складская система, имеющая возможность размещения грузов в проходе, в частности в конце прохода.
Недостатком системы является то, что размещение грузов в концах межстеллаж- ного прохода в сочетании с размещением груза на стеллажах ограничивает область использования системы, а именно комплектовочными системами, где перенос грузов с мест хранения на кран-штабелер осуществ- ляется оператором вручную, а также системами, содержащими кран-штабелер с вильчатым захватом и характеризующимися потерями производственной площади по увеличенное межстеллажное пространство, необходимое для манипулирования таким захватом.
Целью изобретения является расширение технологических возможностей транс- портнс-накопительной системы.
Указанная цель достигается путем осуществления переработки грузов расширенной номенклатуры. Для этого на опорной платформе грузоподъемника смонтированы направляющие элементы и фиксаторы, раз- мещенные с ответными элементами оснований груэозахватов. Механизмы горизонтального перемещения грузозахва- тов установлены на каждом из них и снабжены каждый размещенной на приводном валу сцепной муфтой, выполненной с возможностью соединения с размещенным на опорной платформе грузоподъемника общим для всех грузозахватов приводом. На основании каждого из грузозахватов и на опорной платформе грузоподъемника размещены элементы разъема средств управления приводными органами грузозахвата и соединения с источником энергии. Торцовый стеллаж, установленный в конце меж- стеллажного прохода, имеет консольные полки, выполненные с направляющими элементами, для контактирования с основаниями грузозахватов.
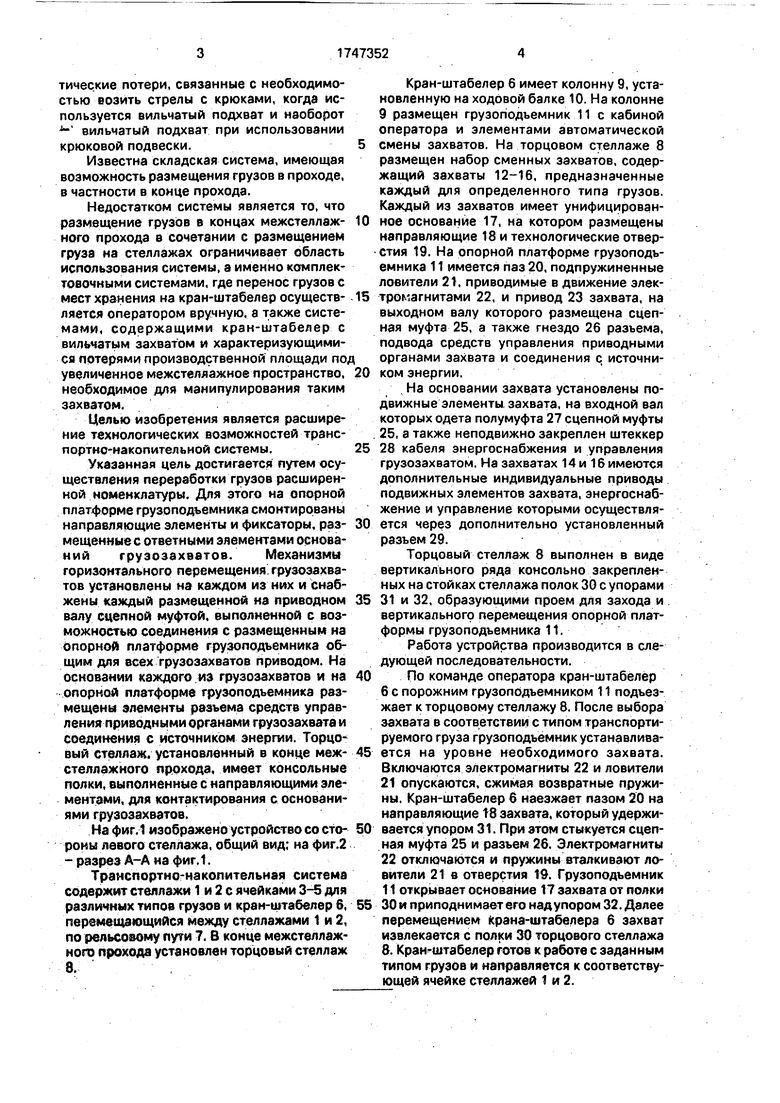
На фиг. 1 изображено устройство со сто- роны левого стеллажа, общий вид; на фиг.2 - разрез А-А на фиг.1.
Транспортно-наколительная система содержит стеллажи 1 и 2 с ячейками 3-5 для различных типов грузов и кран-штабелер 6, перемещающийся между стеллажами 1 и 2, по рельсовому пути 7. В конце межстеллажного прохода установлен торцовый стеллаж 8.
Кран-штабелер 6 имеет колонну 9, установленную на ходовой балке 10. На колонне 9 размещен грузоподъемник 11 с кабиной оператора и элементами автоматической смены захватов. На торцовом стеллаже 8 размещен набор сменных захватов, содержащий захваты 12-16, предназначенные каждый для определенного типа грузов. Каждый из захватов имеет унифицированное основание 17, на котором размещены направляющие 18 и технологические отверстия 19. На опорной платформе грузоподъемника 11 имеется паз 20, подпружиненные ловители 2t, приводимые в движение элек- трог .агнитами 22, и привод 23 захвата, на выходном валу которого размещена сцепная муфта 25, а также гнездо 26 разъема, подвода средств управления приводными органами захвата и соединения с источником энергии.
На основании захвата установлены подвижные элементы захвата, на входной вал которых одета полумуфта 27 сцепной муфты 25, а также неподвижно закреплен штеккер 28 кабеля энергоснабжения и управления грузозахватом. На захватах 14 и 16 имеются дополнительные индивидуальные приводы подвижных элементов захвата, энергоснабжение и управление которыми осуществляется через дополнительно установленный разъем 29.
Торцовый стеллаж 8 выполнен в виде вертикального ряда консольно закрепленных на стойках стеллажа полок 30 с упорами 31 и 32, образующими проем для захода и вертикального перемещения опорной платформы грузоподъемника 11.
Работа устройства производится в следующей последовательности.
По команде оператора кран-штабелер 6 с порожним грузоподъемником 11 подъезжает к торцовому стеллажу 8. После выбора захвата в соответствии с типом транспортируемого груза грузоподъемник устанавливается на уровне необходимого захвата. Включаются электромагниты 22 и ловители
21опускаются, сжимая возвратные пружины. Кран-штабелер 6 наезжает пазом 20 на направляющие 18 захвата, который удерживается упором 31. При этом стыкуется сцепная муфта 25 и разъем 26. Электромагниты
22отключаются и пружины вталкивают ловители 21 в отверстия 19. Грузоподъемник 11 открывает основание 17 захвата от полки 30 и приподнимает его над упором 32. Далее перемещением крана-штабелера 6 захват извлекается с полки 30 торцового стеллажа 8. Кран-штабелер готов к работе с заданным типом грузов и направляется к соответствующей ячейке стеллажей 1 и 2.
Для снятия захвата кран-штабелер 6 подъезжает к стеллажу 8. Грузоподъемник 11 поднимается над упором 32 соответствующей полки стеллажа 8. Кран-штабелер б наезжает захватом на полку 30 и грузоподъ- емник 11 опускает основание 17 захвата между упорами 31 и 32. При включении электромагнитов 22 ловители 21 выходят из отверстий 19. Кран-штабелер 6 обратным ходом сдергивает захват с грузоподъемника 11. Кран-штабелер готов к установке на него другого захвата, соответствующего следующему виду грузопереработки.
Формула изобретения Транспортно-накопительная система, содержащая установленные попарное проходом между ними стеллажи для грузов, кран-штабелер, размещенный на расположенном в проходе рельсовом пути и имеющий подвижный вдоль колонны грузоподъемник с опорной платформой, размещенный по крайней мере в одном из концов прохода торцовый стеллаж с консольными полками, образующими проем для захода и вертикального перемещения опорной платформы крана-штабелера, и грузозахваты, связанные с приводными механизмами их горизонтального перемещения, отличающаяся тем, что, с целью расширения технологических возможностей путем осуществления переработки грузов расширенной номенклатуры, на опорной платформе грузоподъемника смонтированы направляющие элементы и фиксаторы, размещенные с возможностью контактирования с ответными элементами с оснований грузозахватов, механизмы горизонтального перемещения последних установлены на каждом из них и снабжены каждый размещенной на приводном валу сцепной муфтой, выполненной с возможностью соединения с размещенным на опорной платформе грузоподъемника общим для всех грузозахватов приводом, при этом на основании каждого из грузозахватов и опорной платформе грузоподъемника размещены элементы разъема средств управления приводными органами этого грузозахвата и соединения с источником энергии, а консольные полки торцового стеллажа выполнены с направляющими элементами для контактирования с основаниями грузозахватов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Устройство для загрузки и разгрузки стеллажа | 1987 |
|
SU1629227A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| МОСТОВОЙ КРАН-ШТАБЕЛЕР | 1997 |
|
RU2191150C2 |
| Стеллажный кран-штабелер | 1989 |
|
SU1682299A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| ШТАБЕЛИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2017675C1 |
Использованием транспортно-склад- ских системах. Сущность изобретения: стеллажи системы снабжены группами ячеек различного конструктивного исполнения, предназначенными для определенных видов груза, а кран-штабелер имеет набор сменных захватов, конструкция и количество которых определяется видами грузов. Набор захватов размещен в ячейках дополнительного стеллажа, установленного в торце межстеллажного пространства. Каждый захват выполнен основания, присоединенного элементами автоматической смены к грузоподъемнику крана-штабелера, На основании размещены подвижные элементы захвата. Элементы автоматической смены захвата содержат направляющие на основании и пазы под них на грузоподъемнике, подвижные фиксаторы на грузоподъемнике и отверстия для них на основании, а также расцепляемую муфту для связи привода захвата, установленного на грузоподъемнике с подвижными частями захвата, и стыкуемый разъем для соединения средств управления, контроля и привода отдельных узлов захвата с источниками энергии и управления, размещенными на грузоподъемнике. 2 ил. (Л С.
V.. L &® S 1Q А - qfaf
А-А
7 / / 20 10 18 7 11 22 21 19
Quit
19816 г
i /
| МОДИФИЦИРОВАННЫЕ ПОЛИМЕРНЫЕ КОМПОЗИЦИИ | 2012 |
|
RU2599723C2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
