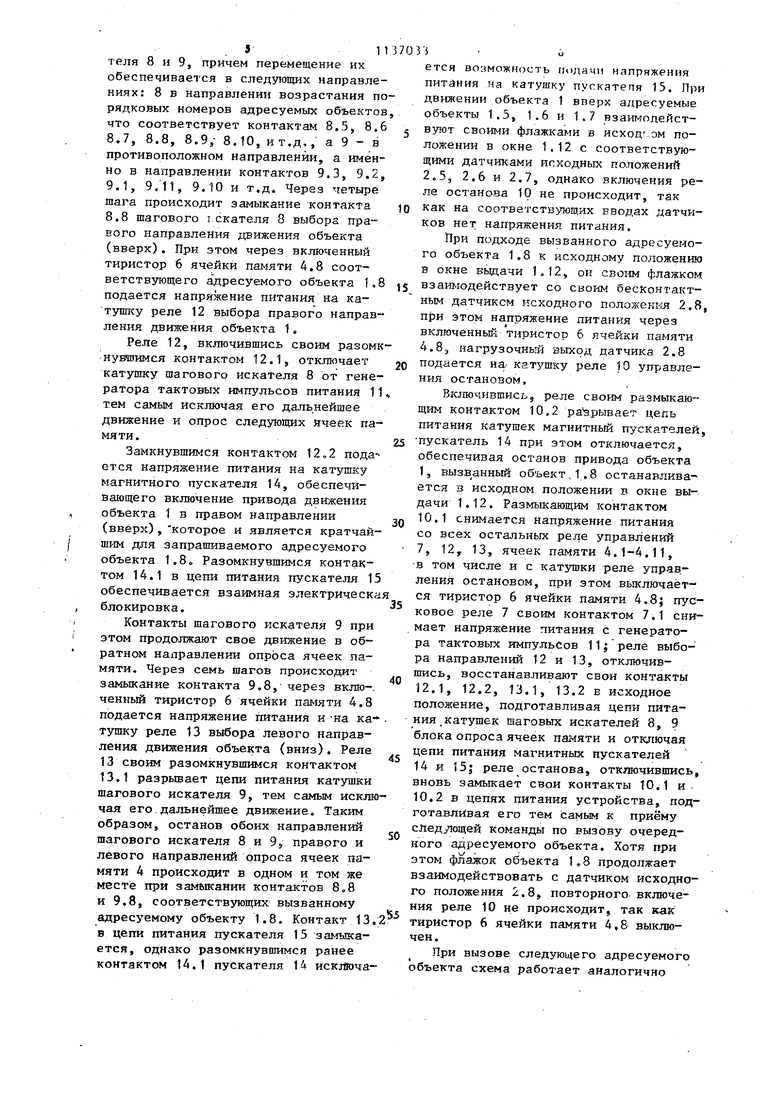
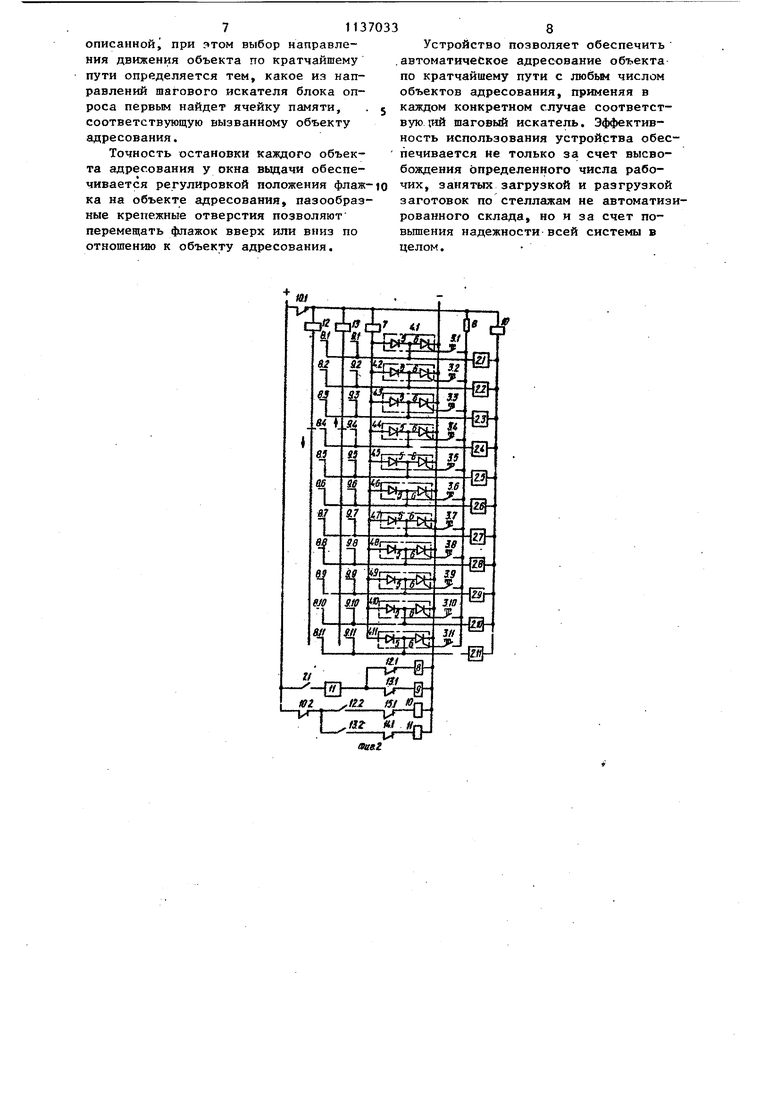
1113 Изобретение относится к автоматизации технологических процессов и . может быть использовано для управления механизированньми стеллажами, конвейерами, гаражами, библиотеками и т.д. Известно устройство для автоматического адресования объекта по кратчайшему пути, содержащее кнопки вызо ва объекта, датчики положения адресуемьпх: объектов, контакты которых включены в цепь питания реле останова, реле выбора направления, saNJbJ кающие контакты которых включены в цепи питания обмоток реверсивного пускателя привода объектов,и пусковое реле. Недостатками известного устройства являются относительно сложная кон струкция узла корректировки имеющейся зоны нечувствительности при ревер сивном управлении приводом стеллажа выполнение блока выбора направления движения,: элементы которого, расположенные по кругу в соответствующем масштабе по отношению к замкнутой транспортной трассе объекта, по количеству подвесок адресования обусловливают жесткую механическую связь меж,ду заранее выбранными одина ковыми конструкциями всех подвесок и точками их остановок. Тем самым исключается возможность замены одной или нескольких подвесок, по конструк ции отличающихся от заранее выбранных так как точки остановок всех. подвесок не зависят от размеров и конструкций самих подвесок, а обусловливаются конструкцией блока выбора направления движения. Кроме того недостатками данного устройства явля ются сложность построения кнопочных полей с зависимой фиксацией, а также две операции оператора по вызову нужной позиции, а именно нажатие соответствутощ й кнопки клавишного перепусковой кнопки, включающей привод объекта. Цель изобретения - повьшение точности адресования при неоднотипных адресуемых объектах при упрощении конструкции. Указанная цель достигается тем, что устройство для автоматического адресования объекта по кратчайшему пути, содержащее кнопки вызова объекта, датчики положения адресуемых объектов, контакты которых включены в цепь питания реле останова, реле выбора направления, замыкающие контакты которых включены в цепи питания обмоток реверсивного пускателя привода объектов, и пусковое реле, снабжено ячейками памяти по числу адресуемых объектов, блоком опроса ячеек памяти, вьтолненным на шаговом искателе, и генератором тактовых импульсов, включенным в цепи обмоток направлений шагового искателя последовательно с размыкающими контактами соответствующих реле выбора направления и замыкающим контактом пускового реле, обмотка которрго подключена к источнику питания через соответствуюпг/ю ячейку памяти,, содержащую последозательно соединенные диод и тиристор, управляющий вход которого подключен к шине питания через соответствующую кнопку вызова, при этом контакты шагового искателя включены в цепь питания реле выбора направления последовательно с тиристором соответствующей ячейки памяти. На фиг,, 1 представлена схема расположения адресуемых объектов; на фиг. 2 - принципиальная схема устройства; на-фиг, 3 - один из возможных вариантов конструктивного исполнения устройства.. Устройство содержит адресуемые в объекте 1, выполненном например, в виде стеллажа, объекты 1,1-1.11 к окну выдачи 1.12. На адресуемых объектах установлены флажки 1,13 - 1„18 (фиг. 3)„ Крепежные отверстия на привалочных плоскостях флажков выполнены в виде пазов с целью обеспечения возможности регулировки положения флажка на адресуемом объекте, Каждому адресуемому объекту соответствует датчик исходного положения 2.12.11 (фиг. 2), смонтированный на кронштейне 2.12 (фиг. 3), который закреплен на боковой стенке объекта 1 и установлен напротив окна 1.12 выдачи. Датчики исходного положения и флажки на адресуемых объектах расположены таким образом, что кажд,ьй адресуемый объект может взаимодействовать своим флажком в исходном положении в окне выдачи 1.12 только с одним, своим датчиком исходного положения . Каждом адресуемому объекту соот-. ветствует своя кнопка вызова 3.1 3.11. Устройство содержит ячейки 3П памяти 4.1 - 4.11 по числу адресуемых объектов, выполненные в виде последоБательно соедине;1ньпс. диода 5 и тиристора,6, Акоды всех диодов подключены к обмотке пускового реле с контактом 7.1. Контакт 7.1 включен в цепь обмЬток шаговых искателай 8 с контактами 8.1- 8.11 и 9 с контактами 9.1 - 9.11. Точки соединения катода диода с анодом тиристора каждой ячейки памяти подключены к соотвстствуюхдим контактш- 8.1 - 8.11 и9,1-9.1Т противо положных направлений шагового искателя блока опроса ячеек паг-шти 4,1 4,11 и к выводам питания соответстьуюшргх датчиков исходпого положения подвесок. Катоды тиристоров 6 всех ячеек памяти соединены с минусовым полюсом источника питания,, Нагрузочные выходы всех датчр:ков исходного положения 2,1 - 2,1 подключены к од:1ому выводу обмотки реле 10 управления осуановом 1C, второй вывод обмотки которого подключен к плюсовому полюсу источника питания. Реле 10 имеет контакты 10.i 10.2. Контактом 7.1 пускового реле 7 обеспечивается по.цача напряжения пи тания НЕ генератор 11 тактовых импульсов. Катушки реле выбора направления 12 (с контактами 12,1,12,2) и 13 (с контактами 13.1 -и 13.2) включе ны в общие шины соответствующих направлений опроса шагового искателя 8 и 9 блока опроса ,ячеекпамяти и свои ми замыкающими контактами 12.2 и 13.2 обеспечивают подачу напряжения на соответствующие катушки магнитны пускателей привода объекта: 14 - пус кателя правого направления (вверх) (с контактами 14.1), 15 - пускателя левого направления (вниз) (с контактами 15.1). Контактами магнитных пускателей 14.1 и 15.1 обеспечивается взаимная электрическая блокировка. К нагрузочному выходу генератора через соответствующие размыкающие контакты 12.1 реле 12 подключена катущка шагового искателя 8 правого направления, обеспечивающего опрос ячеек памяти и последующий пуск привода объекта в правом направлении (вверх), а через размыкающий контакт 13.1 реле 13 подключена катушка шагового искателя 9 левого направления обеспечивающего опрос ячеек памяти и последующий пуск привода объекта в левом направлении (вниз). Управляющий вход каждого тиристора ячейки памяти подключен к плюсовой шине источника питания через соответствующую кнопку вызова 3.1- 3.11 и общий для всех ячеек памяти резистор 16 управления. Контактами реле останова 10.1 и 10.2 обеспечивается останов привода объекта при прибытии запрашиваемого адресуемого объекта 1.1 - 1.11 в исходное положение в проеме окна зьщачи 1.12 и возврат электрической схемы устройства в состояние готовности к приему очередной команды по вызову следующего адресуемого объекта. Устройство для автоматического адресования объекта по кратчайшему пути работает следующим образом. Исходное положение устройства следующее: напротив окна 1,12 в исходном положении находится адресуемый объект 1,4, при этом SHMKHJ TM соответствующие контакты 8.4 и 9.4 шагового искателя 8 и 9 правого и левого направлений опроса. Необходимо вызвать адресуемый объект 1.8 к окну 1,12. При нажатии на кнопку вызова 3.8, соответствующую адресуемому объекту 1.8, на управляющий вход тиристора б соответствующей ячейки памяти 4,8 через резистор 16 управления подается управляющий сигнал, тиристор отпирается и удерживается в дал,ънейшем во включенном состоянии током, протекающим через него, величина которого определяется сопротивлением цепи: плюсовой полюс источника питания, замкнутый контакт 10.1, сопротивление катушки реле 7, диод 5 ячейки памяти 4,8, тиристор 6, минусовой полюс источника питания. Тем самымобеспечивается запоминание произведенной команды вызова. Пусковое реле включается и своим контактом 7.1 обеспечивает подачу напряжения питания на генератор тактовых импульсов 11. Генератор 11 начинает вырабатывать импульсы пульсирующего напряжения питания для катушек шагового искателя 8 и 9 блока опроса. С каждьм импульсом питания обеспечивается передвижение на один шаг контактов направлений шагового иска51теля 8 н 9, причем перемещение их обеспечивается в следующих направлениях: 8 в направлении возрастания по рядковых номеров адресуемых объектов что соответствует контактам 8.5, 8.6 8.7, 8.8, 8.9,- 8.10, ит.д,, а 9 - в противоположном направлении, а именно в направлении контактов 9.3, 9.2, 9.1, 9/11, 9.10 и т.д. Через четыре шага происходит замыкание контакта 8.8 шагового iскателя 8 выбора правого направления движения объекта (вверх). При этом через включенный тиристор 6 ячейки памяти 4.8 соответствующего адресуемого объекта 1,8 подается напряжение питания на катушсу реле 12 выбора правого направ ления движения объекта 1. Реле 12, включившись своим разомк нувшимся контактом 12.1, отключает катушку шагового искателя 8 от генератора тактовых импульсов питания 1 тем самым исключая его дальнейшее движение и опрос следующих Ячеек памяти. Замкнувшимся контактом 12„2 подается напряжение питания на катушку магнитного пускателя 14, обеспечивающего включение привода движения объекта 1 в правом направлении (вверх), которое и является кратчайшим для запрашиваемого адресуемого объекта 1.8. Разомкнувшимся контактом 14.1 в цепи питания пускателя 15 обеспечивается взаимная электрическа блокировка. Контакты шагового искателя 9 при этом продолжают свое движение в обратном налравлении опроса ячеек памяти. Через семь шагов происходит Зс1мыкание контакта 9.8, через вклю-. ченный тиристор 6 ячейки памяти 4.8 подается напряжение питания иНа катушку реле 13 выбора левого направления движения объекта (вниз). Реле 13 своим разомкнувшимся контактом 13.1 разрьшает цепи питания катушки шагового искателя 9, тем самым исклй чая его,дальнейшее движение. Таким образом, останов обоих направлений шагового искателя 8 и 9, правого и левого направлений опроса ячеек памяти 4 происходит в одном и том же месте при замыкании контактов 8.8 и 9.8, соответствующих вызванному адресуемому объекту 1.8. Контакт 13 в цепи питания пускателя 15 замыкается, однако разомкнувпшмся ранее контактом 14.1 пускателя 14 -5 о ется возможность подачи напряжения питания на катуягку пускателя 15. При движении объекта 1 вверх адресуемые объекты 1.5, 1.6 и 1.7 взаш оденствуют своими флажками в исходом положении в окне 1.12с соответствующими датчиками исходных положений 2.5, 2.6 и 2.7, однако включения реле останова 10 не происходит, так как на соответствующих вводах датчиков нет напряжения питания. При подходе вызванного адресуемого объекта 1.8 к исходному положению в окне вьщачи К 12, он своим флажком взаш-юдействует со своим бесконтактным датчиком исходного положения 2.8, при этом напряжение питания через включенный тиристор 6 ячейки памяти 4.8j нагрузочньш выход датчика 2.8 подается на катушку реле 10 управления остановом. Включившись, реле своим размыкающим контактом 10.2 разрывает цепь питания катушек магнитный пускателей, пускатель 14 при этом отключается, обеспечивая останов привода объекта 1, вызв анный объект,.8 останавливается 3 исходном положении в окне выдачи 1.12. Размыкающим контактом 10.1снимается напряжение питания со всех остальных реле управлений 7, 12, 13, ячеек памяти 4.1-4.11, в том числе и с катутаки реле управления остановом, при этом вьжлючаётся тиристор 6 ячейки памяти 4.8; пусковое реле 7 своим контактом 7.1 снимает напряжение питания с генератора тактовых импульСов 11; реле выбора направлений 12 и 13, отключившись, восстанавливав)т свои контакты 12.1, 12.2, 13.1, 13.2 в исходное положение, подготавливая цепи питания.катушек шаговых искателей 8, 9 блока опроса ячеек памяти и отключая цепи питания магнитных пускателей 14 и 15; реле останова, отключившись, вновь замыкает свои контакты 10.1 и 10.2в цепях питания устройства, подготавливая его тем самым к приёму следующей команды по вызову очередного адресуемого объекта. Хотя при этом флажок объекта 1,8 продолжает взаимодействовать с датчиком исходного положения 2.8, повторного включения реле 10 не происходит, так как тиристор 6 ячейки памяти 4,8 выключен. При вызове следующего адресуемого объекта схема работает аналогично 7113 описаннойj при этом выбор направления движения объекта по кратчайшему пути определяется тем, какое ия направлений шагового искателя блока опроса первым найдет ячейку памяти, соответствующую вызванному объекту адресования. Точность остановки каждого объекта адресования у окна выдачи обеспечивается регулировкой положения флаж ка на объекте адресования, пазообраз ные крепежные отверстия позволяют перемещать флажок вверх или вниз по отношению к объекту адресования. Устройство позволяет обеспечить автоматическое адресование объекта по кратчайшему пути с любьм числом объектов адресования, применяя в каждом конкретном случае соответствую ;ий шаговый искатель. Эффективность использования устройства обеспечивается не только за счет высвобождения определенного числа рабочих, занятых загрузкой и разгрузкой заготовок по стеллажам не автоматизированного склада, но и за счет повьшения надежности всей системы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1171758A2 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1475874A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |
| Устройство для дистанционного управления раздаточной тележкой | 1982 |
|
SU1174905A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Устройство для аварийной сигнализации | 1984 |
|
SU1233196A1 |
| Устройство для управления технологической линией | 1986 |
|
SU1381426A1 |
| Устройство для автоматического адресования грузов | 1972 |
|
SU477914A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1024882A2 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ОБЪЕКТА ПО КРАТЧАЙШЕМУ ПУТИ, содержащее кнопки вызова объекта, датчики положения адресуемых объектов, контакты которых включены в цепь питания реле останова, реле выбора направления, замыкающие контакты которых включены в цепи питания обмоток реверсивного пускателя привода объектов, и пусковое реле, отличающееся тем, что, с целью повышения точности адресования при неоднотипных адресуемых объектах, оно снабжено ячейками памяти по.числу адресуемых объектов, блоком опроса ячеек памяти, выполненным на шаговом искателе, и генератором тактовых импульсов, включенньи в цепи направлений шагового искателя последовательно с размыкающими контактами соответствующих реле выбора направления и замыкающим контактом пускового реле, обмотка которого подключена к источнику питания через соответствунщую ячейку памяти, содержащую последовательно соединенные диод и тиристор, управляющий вход которого под§ ключен к шине питания через соответствующую кнопку вызова, при этом (Л контакты шагового искателя включены в цепь питания реле выбора направления последовательно с тиристором соответствующей ячейки памяти. § 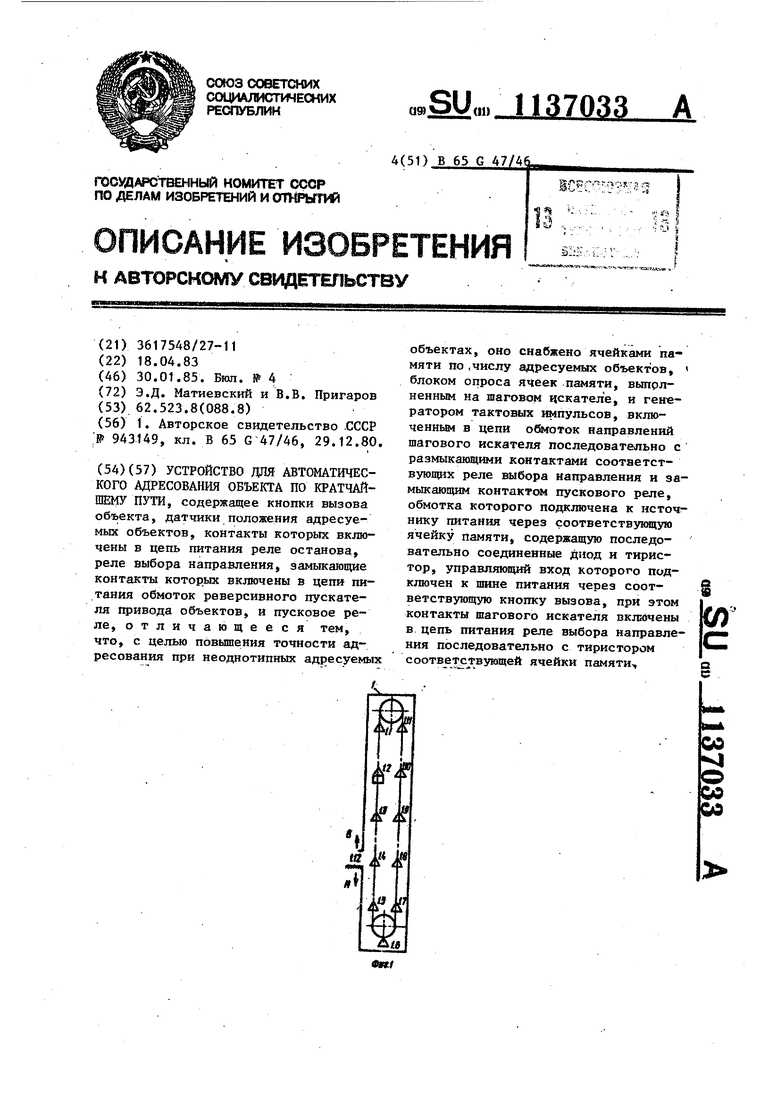
«
Т
ез
М Mb5Iw5S
1
-tEz J-1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1980 |
|
SU943149A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
