Известен механизм шагания мощных экскаваторов, отвалообразователей и подобных машин, монтируемый на раме последней и включаюш ий опорную лыжу, ногу, кривошип и тяговый рычаг. Ногу на подшипниках насаживают на кривошип, а затем шарнирно соединяют с опорной лыжей. Верхняя часть ноги шарнирно связана с концом тягового рычага, второй конец которого укреплен на цапфе надстройки. Однако шарнирное крепление верхней части ноги воспринимает нагрузку только в плоскости четырехзвенника. Такое крепление не позволяет разгрузить кривошип от поперечных усилий при изменении направления движения горнотранспортных машин, не оборудованных специальным механизмом поворота.
11зменение направления движения на таких машинах достигается путем вращения кривошипов сопряженных механизмов четырехопорного кривошипно-рычажного шагающего хода, расположенных по обеим сторонам рамы машины, в разные стороны.
Цель изобретения - добиться разгрузки кривошипа от поперечных нагрузок, возникающих при изменении направления движения машины с четырехопорным кривошипно-рычажньш шагающим ходом. Достигается это тем, что тяговый рычаг снабжен упорным роликом, движущимся по направляющим, образованным на раме машины.
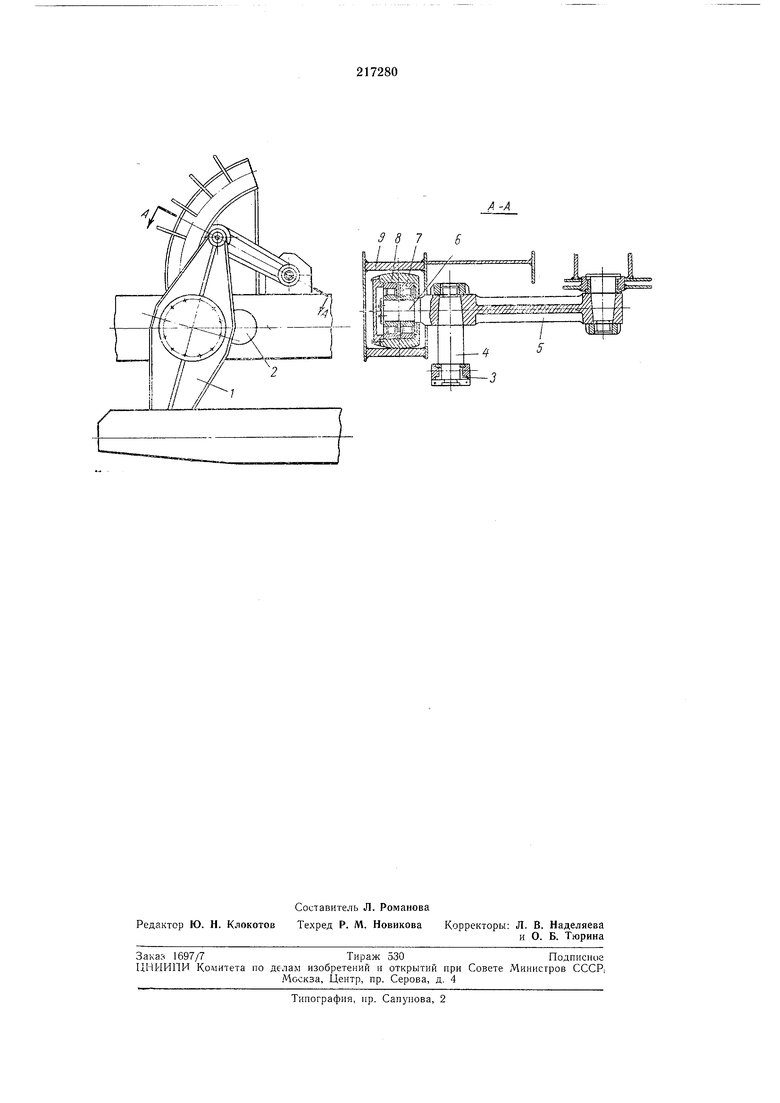
На чертеже показан описываемый механизм щагания и разрез по Л-А.
Нога / с помощью сферического подщипника соединена с кривошипом 2. Верхняя часть ноги связана подщипником 3 и осью 4 с тяговым рычагом 5. На цапфу 6 тягового рычага насалчен на подшипниках 7 упорный ролик S,
движущийся по направляющим 9, укрепленным на раме машины.
Нри передвижении машины на механизм действует нагрузка в плоскости четырехзвенника, которая воспринимается тяговым рычагом 5. Поперечные усилия при изменении направления движения воспринимаются упорным роликом 8, движущимся по направляющим 9.
20Предмет изобретения
Механизм шагания мощных экскаваторов, отвалообразователей и подобных машин, монтируемый на раме последней и включающий
25 опорную лыжу, ногу, кривошип и тяговый рычаг, отличающийся тем, что, с целью разгрузки кривошипа от поперечных нагрузок, тяговый рычаг выполнен с упорным роликом, перемещаемым по направляющим, образованным
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания | 1975 |
|
SU947306A1 |
| МЕХАНИЗМ ШАГАНИЯ ОДНОКОВШОВОГО ЭКСКАВАТОРА, ОТВАЛООБРАЗОВАТЕЛЯ И ПОДОБНЫХ МАШИН | 1970 |
|
SU267496A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1965 |
|
SU170403A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| МЕХАНИЗМ ШАГАНИЯ | 1968 |
|
SU212140A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 1969 |
|
SU251484A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| Механизм шагания экскаватора | 1979 |
|
SU829821A1 |