Изобретение относится к землеройной технике, в частности к механизмам передвижения шагающих экскаваторов.
Цель изобретения - повышение маневренности шагающего экскаватора при. работе на слабых грунтах и улучшение условий при чистке лыжи.
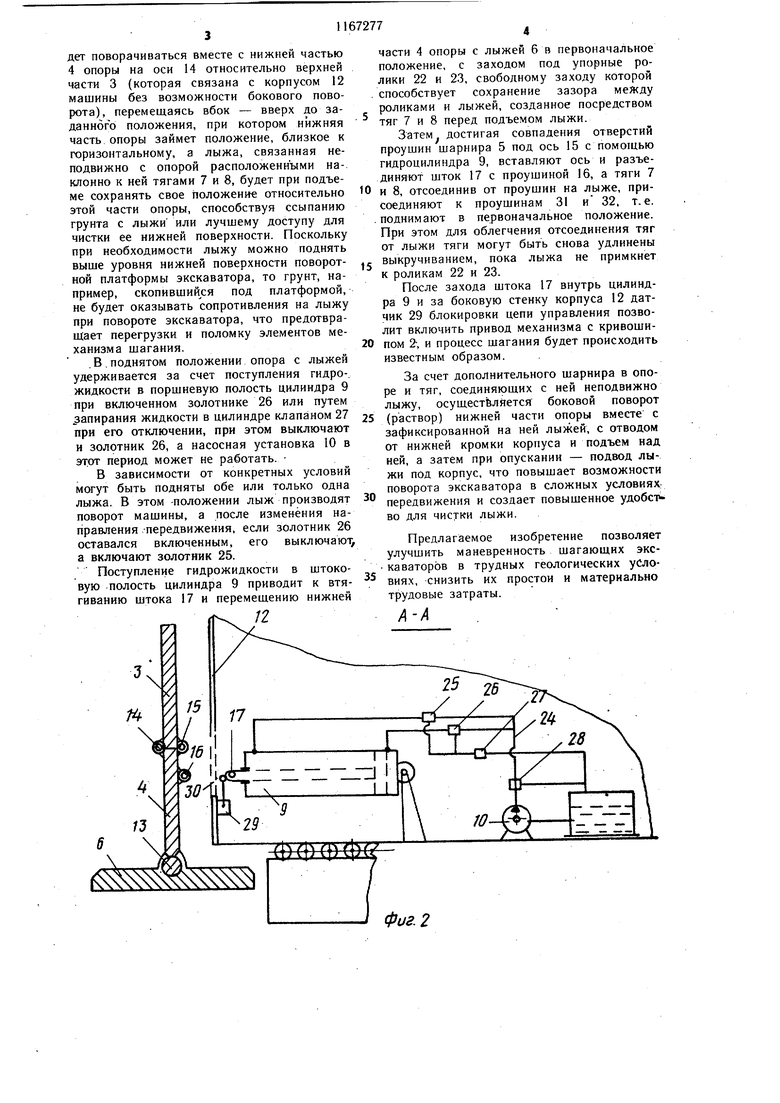
На фиг. 1 изображен механизм шагания, обший вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - положение механизма/при повернутой опоре.
Механизм шагания содержит приводной вал 1 с кривошипом 2, опору из двух частей 3 и 4, соединенных шарниром 5, лыжу 6, тяги 7 и 8, гидроциливдр 9, насосную установку 10.
.Верхняя часть 3 опоры установлена на кривошипе 2 и связана посредством рычага 11 с корпусом 12 экскаватора, а нижняя часть 4 опоры шарниром 13 связана с Лыжей 6. Шарнир 5, делящий опору на верхнюю и нижнюю части, соединяет их между собой при помощи горизонтальных осей 14 и 15, расположенных с боков опоры так, гго при обеих вставленных осях соединение в шарнире неподвижное, а при нахож-, дении одной оси нижняя часть 4 опоры имеет возможность для поворота с боковым раствором посредством гиДроцилиндра 9. На боковой поверхлости нижней части 4 опоры имеется проушина 16 для соединения с штоком 17 гидроцилиндра 9 (при включении последнего) и проушины 18 и 19, в которых установлены регулируемые тяги 7 и 8, с возможностью присоединения концами к проушинам 20 и 21 лыжи 6, на которой последние расположены со смещением от ее продольной оси вбок. Лыжа 6 взаимодействует с корпусом 12 экскаватора при помощи упорных роликов 22 и 23. Соединение тяг осуществляется при помощи дополнительных стержней.
Гидроцилиндр 9 дЬухстороннего действия посредством штока 17 может воздействовать на нижнюю часть 4 опоры и вызывать поворот ее вбок - вверх, для чего он может быть прикреплен щарнирно, например к корпусу 12, в одной вертикальной поперечной плоскости с нижней частью опоры. Гидроцилиндр подключен к насосной установке 10 при помощи магистрали 24, золотников 25 и 26 и запорного клапана 27. Разгрузочный клапан 28 защищает насосную установку 10 от перегрузки, обеспечивая слив жидкости в маслобак при чрезмерном повышении давления в системе.
Датчик 29, взаимодействующий со штоком 17 г(Гдроцнлиндра, может оказывать влияние на цепь управления привода механизма шагания, обеспечивая соответствующую блокировку в работе, в частности не допуская вращения или растормажи вания привода при выдвинутом щтоке из
цилиндра за боковую поверхность корпуса экскаватора, в котором для Ирохождения штока имеется окно 30.
При помощи регулируемых динтовых 5 тяг 7 и 8 можно изменять вертикальный зазор и расстояние между лыжей 6 и роликами 22 и 23, а также фиксировать положение лыжи от поворачивания в шарнирном соединении относительно нижней
- части 4 опоры. Для фиксации тяг 7 и 8 в подтянутом положении на опоре могут быть дополнительные проушины 31 и 32. На лыйсе 6 установлен также механизм выравнивания 33 и 34 положения лыжи, связь которого с опорой обеспечивает правильное положение и направление лыжи при шагании экскаватора.
Механизм шагания работает следующим образом.
В режиме экскавации или шагания части 3 и 4 опоры в шарнире 5 соединены неподвижно при помощи обеих горизонтальных осей 14 и 15, тяги 7 и 8 соединены с опорой в проушинах 18, 19 и 31 32. Положение лыжи 6 обуславливается механизмом выравнивания 33, 34 и положением опоры на кривошипе 2, а действие опоры как и процесс шагания в сущности происходит известным образом.
При необходимости изменить направление передвижения экскаватора (которое осуществляется . поворотом корпуса относительно опорной части с поднятыми лы- жами) в условиях большого скопления грунта под поворотной частью (например, вследствие нагребания опорной частью или просадки машины) в гидроцилиндр 9
5 Посредством включения золотника 26 по- дают жидкость от насосной установки 10. Одновременно с золотником 26 включают и запорный клапан 27, открывающий путь сливу жидкости из штоковой полости цилиндра 9 в бак, проходящий через золотник 25. Подошедший к части 4 опоры конец штока 17 соединяют в проушине. 16 стержнем, а- регулируемые тяги 7 и 8 отсоединяют от проушин 31 и 32, и опустив концы на лыжу, соединяют с проушинами
5 20 и 21. Тяги 7 и 8 позволяют при этом путем уменьшения их длины вращением после присоединения к лыже и при их расположении присоединенными концами к проушинам лыжи со смещением от ее продольной оси наружу создать вертикальный зазор между лыжей и упорными роли- ками 22 и 23 за счет небольшого поворачивания лыжи в шарнире 13.
Затем, отключив временно гидроцицилнндр 9 золотником 26, вынимают ось 15 5 из Щарнирного узла 5, оставив ось 14. При повторном включении золотника 26 под воздействием штока 17 гидроцилиндра 1Лжа 6 выйдет из-под роликов 22, 23 и будет поворачиваться вместе с нижней частью 4 опоры на оси 14 относительно верхней части 3 (которая связана с корпусом 12 машины без возможности бокового поворота), перемещаясь вбок - вверх до заданного положения, при котором нижняя часть опоры займет положение, близкое к горизонтальному, а лыжа, связанная неподвижно с опорой расположенными наклонно к ней тягами 7 и 8, будет при подъеме сохранять свое положение относительно этой части опоры, способствуя ссыпанию грунта с лыжи или лучшему доступу для чистки ее нижней поверхности. Поскольку при необходимости лыжу можно поднять выше уровня нижней поверхности поворотной платформы экскаватора, то грунт, например, скопивший ся под платформой, не будет оказывать сопротивления на лыжу при повороте экскаватора, что предотвращает перегрузки и поломку элементов механизма шагания. .В, поднятом положении опора с лыжей удерживается за счет поступления гидро-. жидкости в поршневую полость цилиндра 9 при включенном золотнике 26 или путем запирания жидкости в цилиндре клапаном 27 при его отключении, при этом выключают и золотник 26, а насосная установка 10 в этот период может не работать. В зависимости от конкретных условий могут быть подняты обе или только одна лыжа. В этом -положении лыж производят поворот машины, а после изменения направления .-передвижения, если золотник 26 оставался включенным, его выключают, а включают золотник 25. Поступление гидрожидкости в штоковую полость цилиндра 9 приводит к втягиванию щтока 17 и перемещению нижней части 4 опоры с лыжей 6 в первоначальное положение, с заходом под упорные ролики 22 и 23, свободному заходу которой способствует сохранение зазора между роликами и лыжей, созданное посредством тяг 7 и 8 перед подъемом лыжи. Затем достигая совпадения отверстий проушин шарнира 5 под ось 15 с помощью гидроцилиндра 9, вставляют ось и разъединяют шток 17 с проушиной 16, а тяги 7 и 8, отсоединив от проушин на лыже, присоединяют к проушинам 31 и 32, т.е. поднимают в первоначальное положение, При этом для облегчения отсоединения тяг от лыжи тяги могут быть снова удлинены выкручиванием, пока лыжа не примкнет к роликам 22 и 23. После захода штока 17 внутрь цилиндра 9 и за боковую стенку корпуса 12 датчик 29 блокировки цепи управления позволит включить привод механизма с кривошипом 2-, и процесс шагания будет происходить известным образом. За счет дополнительного шарнира в опоре и тяг, соединяющих с ней неподвижно лыжу, осуществляется боковой поворот (раствор) нижней части опоры вместе с зафиксированной на ней лыжей, с отводом Q. нижней кромки корпуса и подъем над „g, а затем при опускании - подвод „од корпус, что повышает возможности поворота экскаватора в сложных условиях передвижения и создает повыщенное удобст во для чистки лыжи. Предлагаемое изобретение позволяет улучшить маневренность шагающих экскаваторов в трудных геологических условиях, снизить их простои и материально трудовые затраты. иг. 2
12
21
Фие.З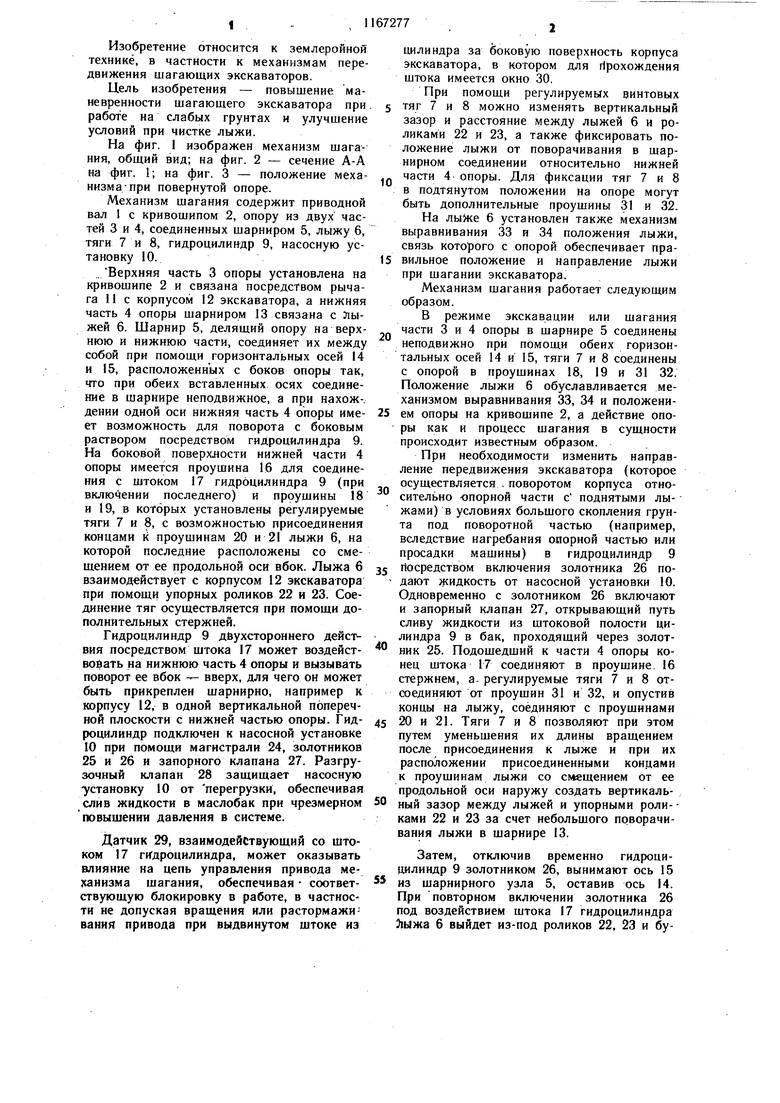
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| Механизм шагания экскаватора | 1983 |
|
SU1145097A2 |
| Механизм шагания экскаватора | 1980 |
|
SU899802A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающее ходовое оборудование | 1987 |
|
SU1447999A1 |
| Шагающий механизм | 1978 |
|
SU713967A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| МЕХАНИЗМ ШАГАНИЯ | 1968 |
|
SU212140A1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
МЕХАНИЗМ ШАГАНИЯ ЭКСКАВАТОРА, включающий лыжу с тягами, опору, связанную с лыжей и корпусом экскаватора, отличающийся тем, что, с целью повышения маневренности машины при работе на слабых грунтах, опора имеет шарнир, делящий ее на верхнюю и нижнюю части, а нижняя часть опоры установлена с возможностью поворота посредством гидроцилиндра и имеет проушины, в которых установлены тяги. и ел Од М N9 « Ьг / 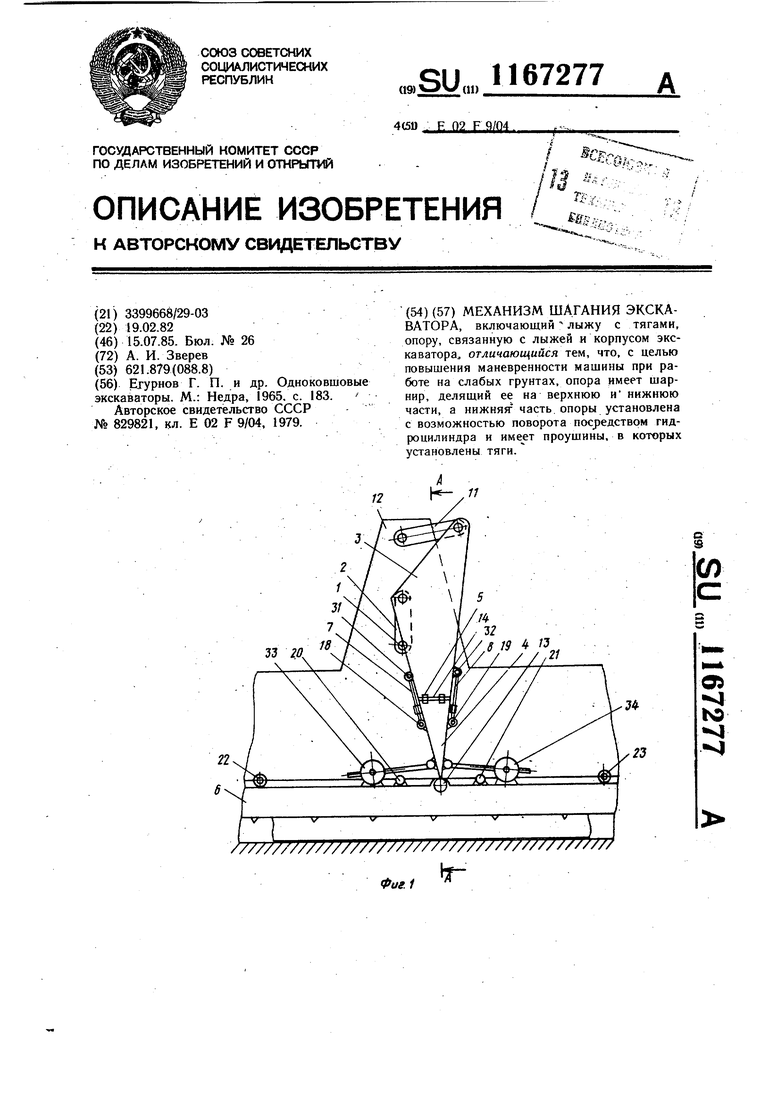
| Егурнов Г | |||
| П | |||
| и др | |||
| Одноковшовые экскаваторы | |||
| М.: Недра, 1965, с | |||
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |
| Механизм шагания экскаватора | 1979 |
|
SU829821A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
