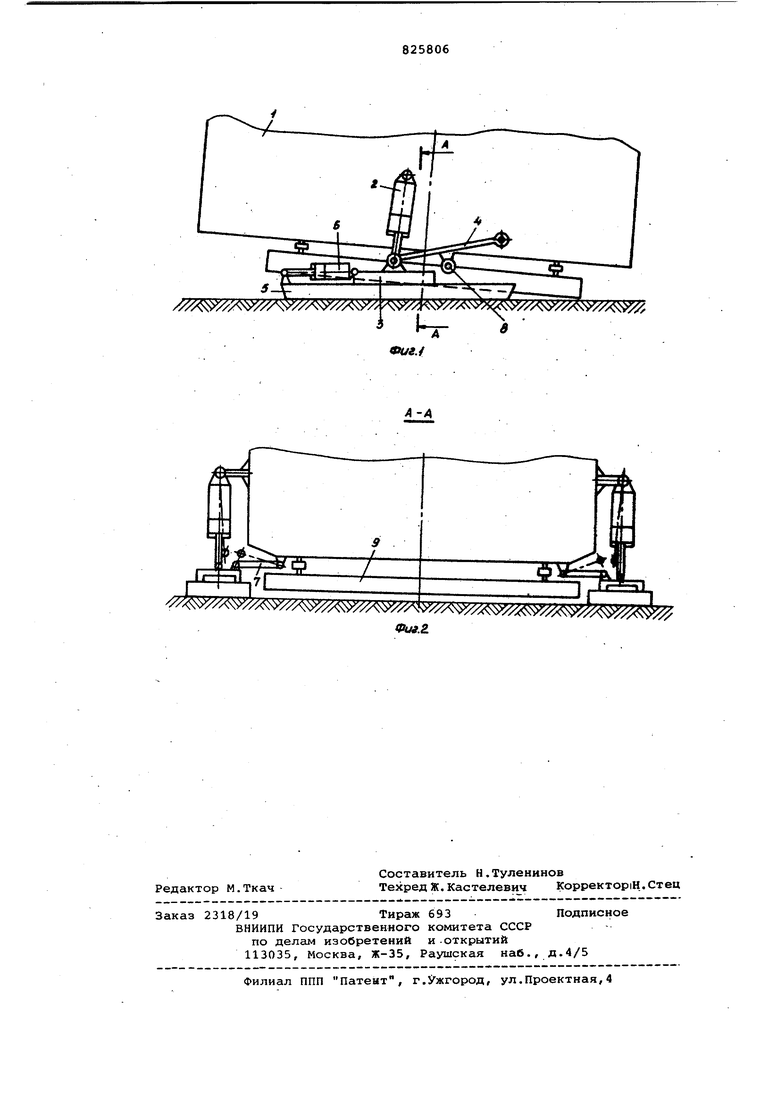
Изобретение относится к землеройным машинам, преимущественно к шагаю щим экскаваторам, с механизмами шагания. Известен механизм шагания, включа щий корпус,-опорные лыжи, подъемные силовые цилиндры и промежуточные пли ты, соединенные шарнирно с подъемным силовыми цилиндрс1ми, опиракициеся на лыжи через катки и имекяцие возможность перемещаться по опорньм лыжам посредством тяговых цилиндров, шарнирно соединенных с корпусом и лыжами flj . , Ввиду высоких контактных давлений, возникающих при прогибе лыж нагрузкой, возможен ускоренный избное дорожек качения, а передача боковых нагрузок через реборды кат ков не допускает боковых уклонов при передвижении. Известен механизм шагания экска ватора, включающий корпус, подъемные силовые цилиндры, соединенные с опорными плитами и корпусом экскаватора, и лыжи, шарнирно соединен ные с тяговыми силовыми цилиндрами TzQ . в этом механизме шагания гори-зонтальные нагрузки от сопротивления перемещению машины и боковые нагрузки при движении по косогору передаются на корпус через штоки и уплотнения подъемных цилиндров, увеличивая их износ и снижая надежность работы механизма шагания. Цель изобретения - повышение надежности и долговечности механизма. Указанная цель достигается тем, что механизм шагания экскаватора, включающий корпус, подъемные силовые цилиндры, соединенные с корпусом экскаватора и шарнирно с опорными плитами, и лыжи, шарнирно соединенные с тяговыми силовыми цилиндрами, снабжен продольными и поперечными тягами, при этом каждая продольная тяга одним концом связана с корпусом, а другим - с шарниром, связываклцим подъемный силовой цилиндр с опорной плитой, а каждая поперечная тяга связана шарнирно одним концом с корпусом, а другим - с опорной плитой. На фиг.1 показан предлагаемый механизм шагания, вид сбоку; на фиг.2 сечение А-А на фиг.1. К корпусу 1 шарнирно прикреплены подъемный силовые цилиндры 2, опиргиосциеся на опрные плиты 3 через шарниры и удерживаемые в заданном положении относительно корпуса 1 продольными тягами 4. Опорные плиты 3 опираются на лыжи 5 и выполнены с. возможностью перемещения относительно лыж 5 посредством тяговых силовых цилиндров 6. Опорные плиты соединены шарнирно с корпусом 1 посредством поперечных тяг 7. На продольных тягах 4 смонтированы упоры 8, удерживающие лыжи 5 в горизонтальном положении при опирании машины на опорную часть 9 экскаватора.
Механизм шагания работает следующим образом.
При выдвижении штоков подъемных силовых цилиндров 2j передняя по ходу движения кромка опорной части ,9 отрывается от грунта. Включаются на втягивание тяговые силовые цилиндры 6, и корпус 1 перемещается относительно лыж 5, При этом усилия с тяговых силовых цилиндров передаются на опорные плиты и корпус через продольные тяги 4. Штоки подъемных силовых цилиндров 2 втягиваются, передняя по ходу движения кромка лыж 5 отрывается от грунта, включаются на выдвижение тяговые силовые Е№1линдры 6. При этом лыжи 5 перемещаются в положение следующего шага. По окон чании перемещения, штоки подъемных силовых цилиндров 2 втягиваются до соприкосновения лыж 5 с упорами 8 и лыжи 5 занимают горизонтальное положение. Одновременно с поворотом поперечных тяг 7 при подъеме лыж 5 они подтягиваются к корпусу 1 и удерживаются в таком положении при повороте машины.
При дв1 жении по косорогу горизонтальная боковая нагрузка от корпуса 1 передается на лыжи 5 через поперечные тяги 7 и опорные плиты 3.
Шарнирное крепление подъемных силовых цилиндров к корпусу и опррным плитам обеспечивает передачу горизонтальных нагрузок через продольные и поперечные тяги и исключает нагружени штоков и уплотнений подъемных силовых цилиндров. Это повышает надежность
механизма шагания и его долговечност Передача усилия тяговых силовых цилиндров на корпус продольными тягами и восприятие боковых нагрузок, возникакяцих при движении по косорогу поперечными тягами позволяет увеличивать преодолеваемые уклоны, а также применять этот механизм не только в четырехопорном, но и в трехопорнбм исполнении с опиранием при шагании на кромку опорной части.
Постоянное положение подъемных силовых цилиндров относительно корпуса при его: перемещении позволяет приблизить центр тяжести машины к шарниру крепления подъемных цилиндро на корпусе, что уменьшает нагруженность деталей опорно-поворотного устройства и реакцию на кромке опорной части при трехопорном исполнении механизма шагания.
Формула изобретения
Механизм шагания экскаватора, включающий корпус, подъемные силовые цилиндры, соединенные с корпусом экскаватора и шарнирно. с опорными плитами, и лыжи, шарнирно соединенные с тяговыми силовыми цилиндрами, о т лич ающи и с я тем, что, с целью повышения надежности и долговечности, ОН снабжен продольными и поперечными тягами, при этом Кс1ждая продольная тяга одним концом связана с корпусом, а другим - с шарниром, связывающим подъемный силовой цилиндр с опорной плитой, а Ксокдая поперечная тяга шарнирно связана одним концом с корпусом, а другим - с опорной плитой.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 212140, кл. Е 02 F 9/04, 1965.
2.Авторское свидетельство СССР
251484, кл. Е 02 F 9/04, 1968 (прототип) . .Л //(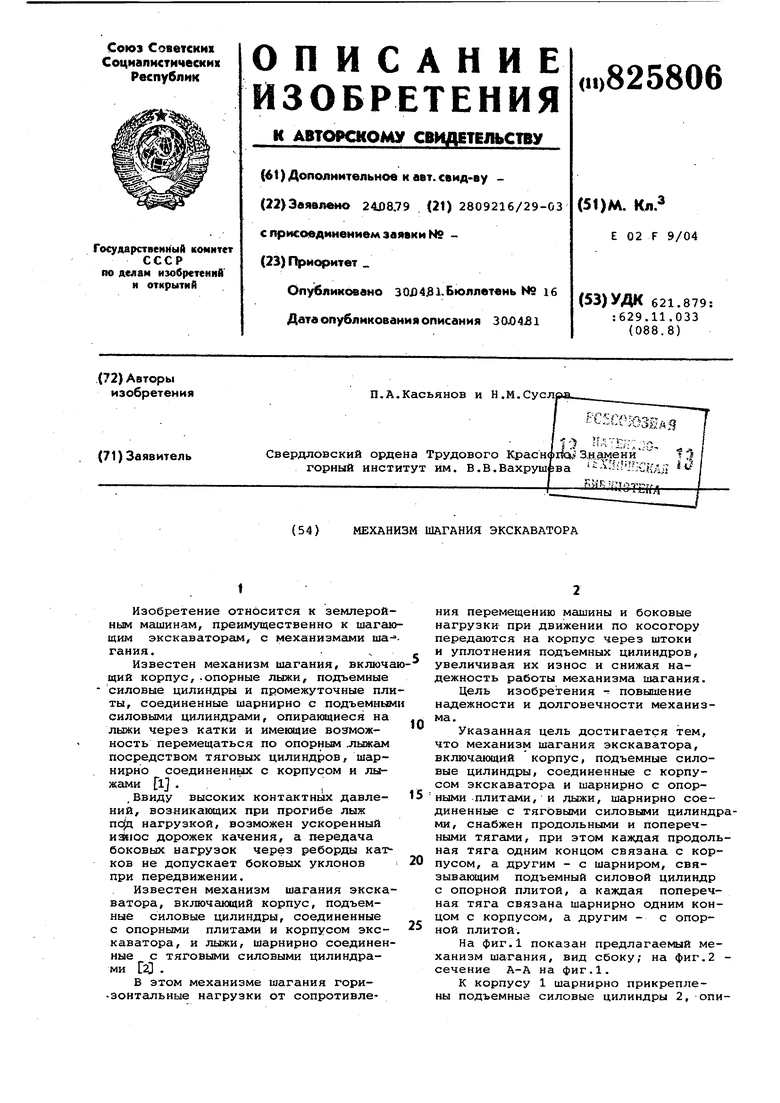
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее ходовое оборудование | 1979 |
|
SU899801A1 |
| Механизм шагания экскаваторов | 1974 |
|
SU631610A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания экскаватора | 1980 |
|
SU947307A1 |
| Экскаватор | 1983 |
|
SU1117384A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Механизм шагания экскаватора | 1983 |
|
SU1145097A2 |
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 1969 |
|
SU251484A1 |