Известны фрикционные стопоры якорной цепи с дистанционным управлением, состоящие из осиовнаия с гнездом, выступов на нем для укладки звеньев цепи и рычажного механизма с электроприводом. Этот механизм выполнен в виде рычагов, симметрично расположенных и поворотных на осях, прикрепленных к основанию. Верхние концы рычагов взаимодействуют с звеном цепи и выступами основания, а нижние концы шарнирно связаны с двумя сходящимися тягами. Этн тяги крепят при помощи оси к силовому винту электропривода, снабженному тарельчатыми пружинами.
В предложенном стопоре сходящиеся тяги снабжены выступами, ограничивающими их поворот на осп. Концы тяг, взаимодействующие с рычагами, выполнены с пазами, которые заклинивают эти рычаги при стопорении ценн. Такое конструктивное выполнение позволяет повысить падежность зажатия якорной цепи и обеспечить автоматическую компенсацию износа трущихся поверхностей.
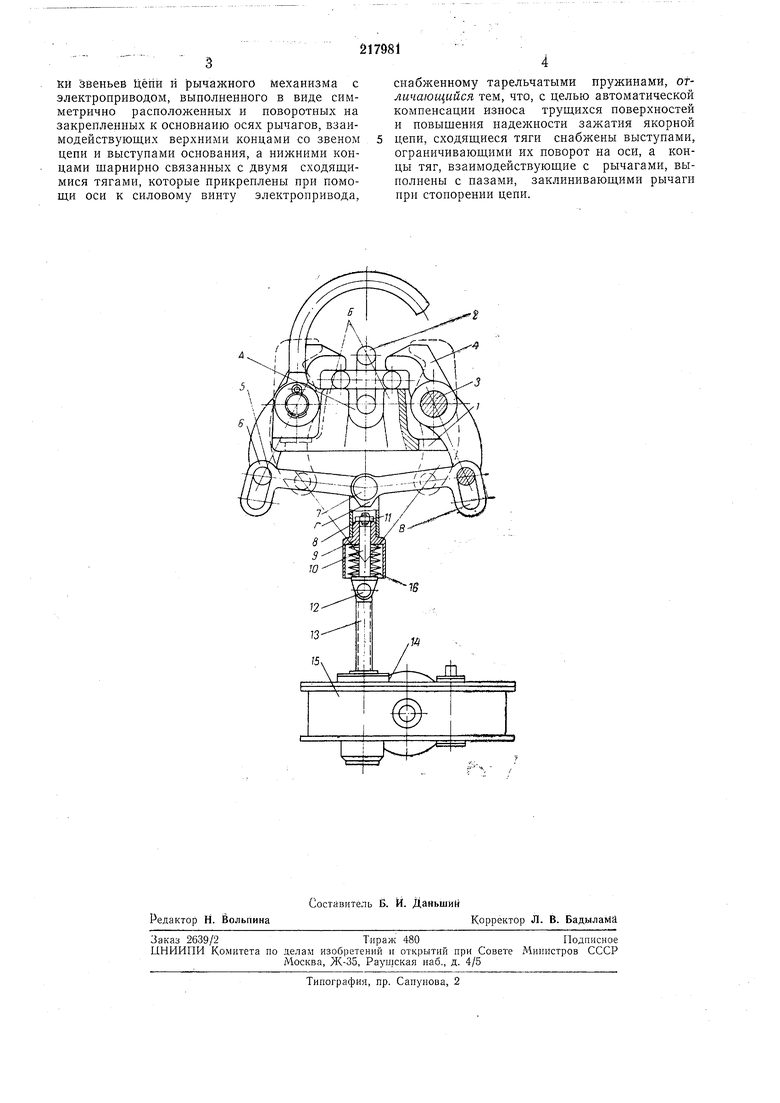
На чертеже схематично изображен фрикционный стопор, состоящий из основания 1 ч гнездом А и выступами Б для укладки звена 2 якорной цени. На основании закреплены оси 3 с поворотно смонтированными рычагами 4, связанными пальцами 5 с тягами 6, которые имеют пазы В. Противоположнь1е
концы тяг, снабженные выступами Г, щарнирно закреплены на оси 7. Это ось связана с резьбовым стаканом 5, имеющим вкладыщ 9, выполненный с центральным отверстием для прохождения стержня 10, который фиксируется при помощи гайки 11.
Стерлсень 10, установленный на оси 12, шарнирно присоединен к силовому винту 13, вращающемуся от электродвигателя 14 с редуктором 15. На стержне силового винта 13 расположены тарельчатые пружины 16. При вращении электродвигателя 14 силовой винт перемещается в осевом направлении, сводя (или разводя) в зависимости от направления вращения электродвигателя 14 рычаги через тяги и тарельчатые пружины 16.
По достиженнн угла поворота тяг, соответствующего наибольщему усилию прижатия цепи, выступы Г соприкасаются и фиксируют поворот одной тяги относительно другой. При дальнейшем неремещении силового винта 13 объединенные тяги с пазами В воздействуют на нижние концы рычагов 4 через пальцы 5, заклинивая рычаги.
Предмет изобретения
ки звеньев Цепи и рычажного механизма с электроприводом, выполненного в виде симметрично расположенных и поворотных на закрепленных к основнаию осях рычагов, взаимодействующих верхними концами со звеном цени и выступами основания, а нижними концами шарнирно связанных с двумя сходящимися тягами, которые прикреплены при помощи оси к силовому винту электропривода,
снабженному тарельчатыми пружинами, отличающийся тем, что, с целью автоматической компенсации износа трущихся поверхностей и повышения надежности зажатия якорной цепи, сходящиеся тяги снабжены выступами, ограничивающими их поворот на оси, а концы тяг, взаимодействующие с рычагами, выполнены с пазами, заклинивающими рычаги при стопорении цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРИКЦИОННЫЙ СТОПОР ЯКОРНОЙ ЦЕПИ СУДНА | 1969 |
|
SU251397A1 |
| Самоходный ракетный комплекс | 2016 |
|
RU2626784C1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ ЗАРЯЖАНИЯ ПУШКИ | 2001 |
|
RU2195617C1 |
| ФРИКЦИОННЫЙ СТОПОР ДЛЯ ЗАКРЕПЛЕНИЯ ЯКОРНОЙ ЦЕПИ | 1969 |
|
SU234172A1 |
| СТОПОР ДЛЯ ЯКОРНОЙ ЦЕПИ | 1967 |
|
SU200449A1 |
| СТОПОР ЯКОРНОЙ ЦЕПИ | 1966 |
|
SU189704A1 |
| БОЕВОЙ МЕХАНИЗМ ТКАЦКОГО СТАНКА | 1990 |
|
RU2011706C1 |
| СТОПОР ЯКОРНОЙ ЦЕПИ | 1973 |
|
SU366114A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |