, Известны стопоры для якорной цепи, содержащие плиту с вертикальными щеками, между которьгми на оси жестко установлен рычаг с щарнирно закрепленным утором, и кулачковую иолумуфту, стопорящую ось.
В предложенном стопоре ось, располол енная между вертикальными щеками плиты, выполнена полой, образуя гидродилиндр, подпружиненный щток поршня которото связан с кулачковой полу|Муфтой и с многозаходным винтом. Винт взаимодействует при аксиальном перемещении с гайкой, передвигающейся вместе с винтом -вдоль оси на величину, равную высоте кулачков полумуфты.
Это позволяет обеспечить механизированное дистанционное управление стопорением и освобождением цепи.
Для возможности ручного управления стопором в штоке порщня выполнена аксимальное отверстие с винтовой нарезкой.
В это отверстие входит винт, связанный с ручным приводом.
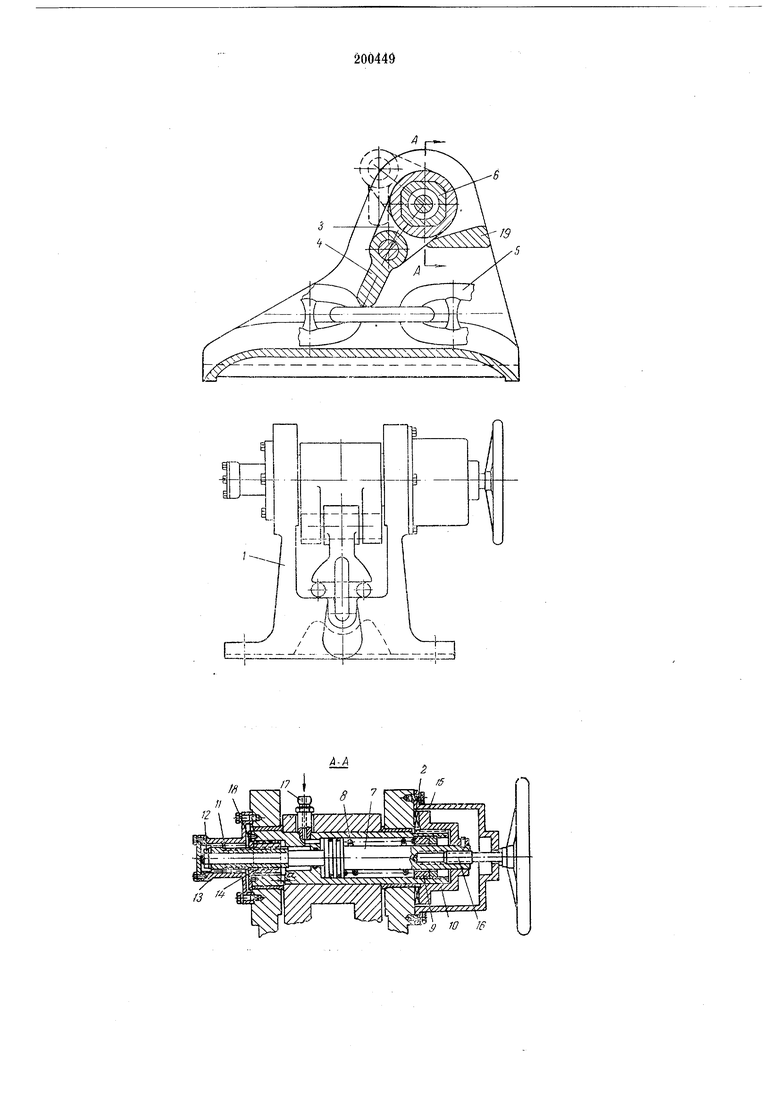
На чертеже изображен описываемый стопор в двух проекциях и сечение но А-А.
Стопор содержит плиту со щеками 1, на одной из которых смонтированы кулачки 2, рычаг 5 и щарнирно соединенный с ним рычаг 4, упирающийся в вертикальное и горизонтальное звенья цепи 5. Рычаг 3 жестко связан с полой осью-гидроцилиндром 6, внутри которой
рааположен подпружиненный порщень 7 со штоком. 8 поршня опирается на гайку 9. На ось 6 подвижно насажена кулачковая нолумуфта 10, жестко связанная со штоком поршня. С другой стороны на шток порщня свободно посажен многозаходный винт //, закрепленный гайкой 12. Многозаходный винт удерживается от вращательного движения с помощью шлицевого, .шпоночного или другого
соединения и стакана 13, жестко связанного со щекой плиты. В оси 6 установлена гайка 14 с зазором а, равным высоте кулачков полумуфты. Для защиты полумуфты от внешней среды предусмотрен стакан 15, служащий одновременно опорой для винта 16 с маховиком ручного привода. Рычаги 5 и 4 расположены под углом друг к другу для освобождения цепи под нагрузкой. Рабочая жидкость подается в гидроцилиндр через штуцер 17.
В застопоренном положении рычаг 4 упирается в вертикальное и горизонтальное звенья цепи, а кулачковая полумуфта замкнута и препятствует повороту полой оси. При освобождении цепи рабочая жидкость подается в полость оси-гидроцилиндра 6 через щтуцер и перемен1,ает поршень, который сжимает пружину 8, выводя из зацепления кулачковую полумуфту. Многозаходный винт, связанный со штоком иоршня, перемещает гайку 14 в осекулачков полумуфты. Когда кулачки полумуфты выходят из зацепления и освобождается ось 6, гайка 14, выбрав зазор а, упирается ;i выступ гнезда в этой оси. Дальнейшее перемещение поршня вызывает поворот гайки. 14, а следовательно, и оси 6 с жестко связанным с ней рычагом 3. При этом рычаг 4 выходит из зацепления с цепью 5 и освобождает ее.
Стопорение цйпи производится после снятия давления в оси 6. Под действиел сжатой пружины 8 многозаходный винт перемещается, гайка 14 передвигается вдоль оси в первоначальное положение на величину, равную высоте кулачков полумуфт, и упирается в крышку 18. Дальнейшее перемещение винта вызывает поворот гайки 14 и связанной с ней полой оси 6. При этОМ рычаг 3 разворачивается до упора 19, кулачковая полумуфта замыкается, фиксируя ось 6 от поворота. Рычаг 4 в зависимости от положения цепи 5 отно:сительно стопора занимает положение между вертикальньши звеньями цепи, что обеспечивает ее крепление, или ложится на вертикальное звено. Во втором случае цепь закрепляется автоматически поворотом рычага 4 относительно оси 6 при перемещении цепи 5 на одно звено.
Ручное управление стопора осуществляют перемещением штока норшня с помошью винта с маховиком. При этом элементы стопора взаимодействуют так же, как и при подаче рабочей жидкости в ось-гидроцилиндр.
П.редмет изобретения
1.Стопор для якорной цепи, состоящий из плиты с вертикальными щеками, между которыми на оси жестко установлен рычаг с шарнирно закрепленным упором, и кулачковой полумуфты, отличающийся тем, что, с целью обеспечения ме.ханизированного дистанционного управления стопорением и освобождением цепи, ось выполнена полой, образуя гидроцилиндр, подпружиненный шток поршня которого связан с кулачковой полумуфтой и с многозаходным винтом, взаимодействующим при
аксиальном перемещении с гайкой, перемещающейся вместе с влитом вдоль оси на величину, равную высоте кулачков лолумуфты.
2.Стопор по п. 1, отличающийся тем, что, с целью обеспечения ручного управления, щток
поршня выполнен с ак1сиальным отверстием, имеющим винтовую нарезку, взаимодействующую с винтом, связанным с ручным приводом.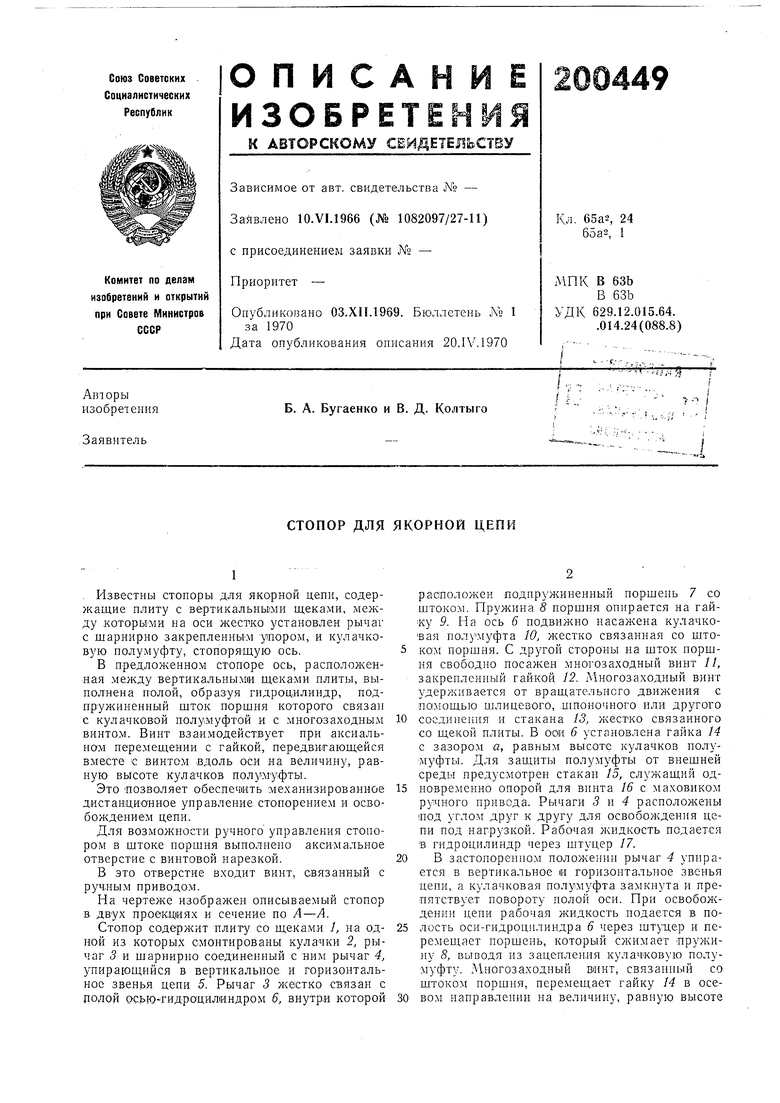
| название | год | авторы | номер документа |
|---|---|---|---|
| Стопор для якорной цепи | 1976 |
|
SU567631A2 |
| Стопор для якорной цепи | 1973 |
|
SU478761A1 |
| Механизм подач | 1985 |
|
SU1292996A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| СТОПОР ЯКОРНОЙ ЦЕПИ | 1970 |
|
SU288577A1 |
| Подвеска электромагнитов вагона-дефектоскопа | 1984 |
|
SU1284869A1 |
| ОБРАТНЫЙ ПОВОРОТНЫЙ ЗАТВОР (ВАРИАНТЫ) | 2012 |
|
RU2514452C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗО-, НЕФТЕ- И ПРОДУКТОПРОВОДОВ, МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОТКЛЮЧЕНИЯ ШТУРВАЛА РУЧНОГО ДУБЛЕРА | 2007 |
|
RU2334132C1 |
| Автоматическая линия для обработки крупногабаритных колец | 1985 |
|
SU1252132A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |