Известны фрикционные стоиоры для закрепления якорной цепи с дистанционным приводом, состоящие из ходового винта с иолзунами и поворотными упорами с нащечинами, смонтированными на корпусе, тарельчатых пружин и рычагов.
Отличием предлагаемого стопора является то, что в двойных вогнутых прорезях нащечин установлены ползуны с упорами и кулачковыми выступами, взаимодействуюи1,ими с выступами рычагов, смонтированных на парных рычагах, кинематически сопряженных с рычагами заводки тарельчатых пружин так, что при нахождении ползунов в крайнем внутреннем положении тарельчатые пружины нагружены и стопорят якорную цепь, а при нахождении в крайнем внешнем положении освобождают се для выборки и простановки якоря.
Это уменьшает мошность приводного электродвигателя и обеспечивает автоматическое стоиорение и отдачу якорной цепи.
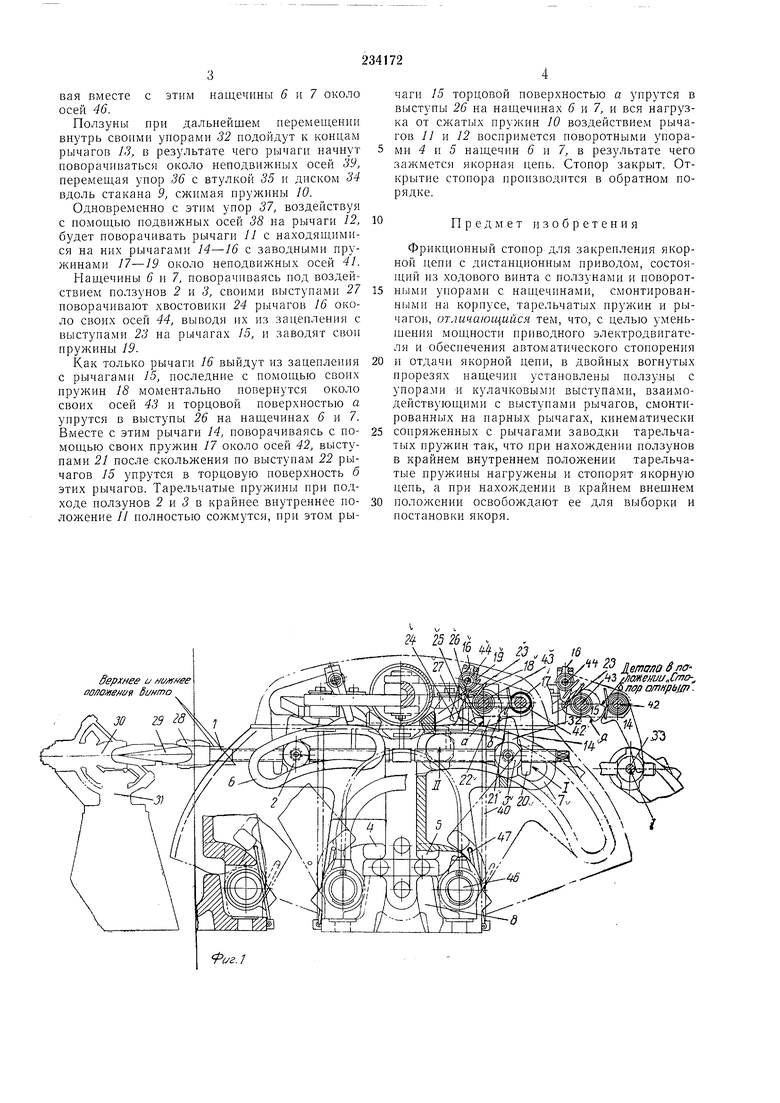
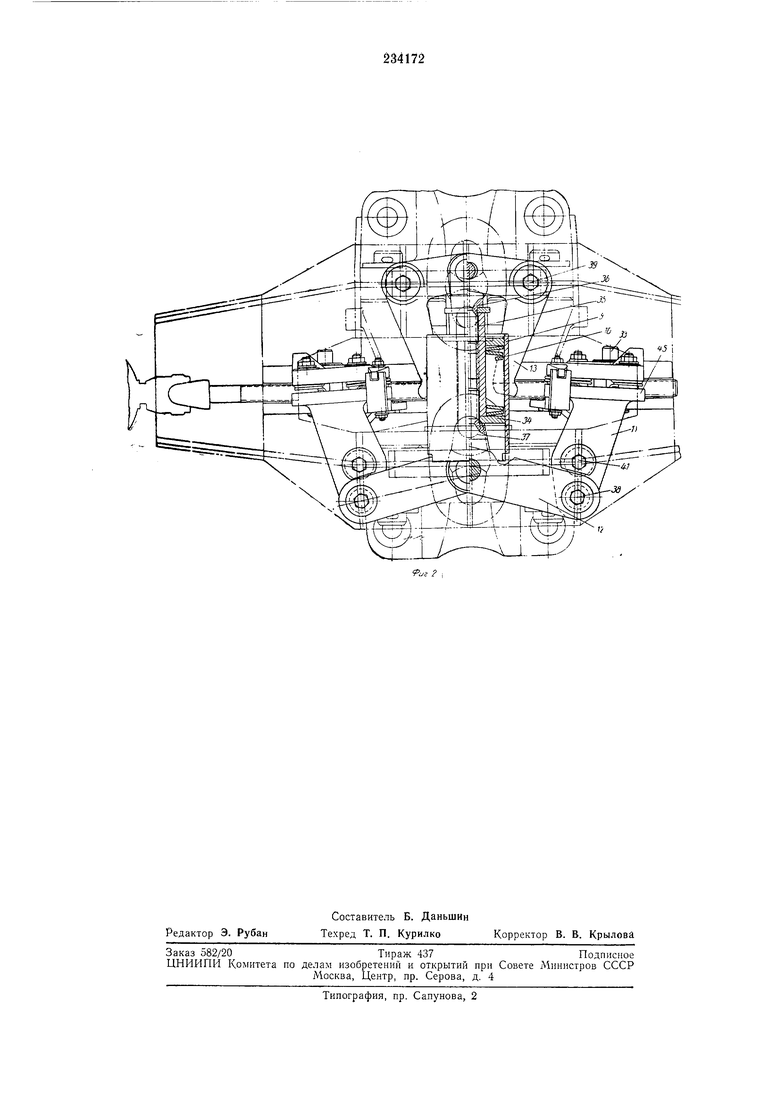
На фиг. 1 схематически изображен предлагаемый стопор с частичным разрезом; на фиг. 2 - то же, вид сверху.
Ходовой винт / с ползунами 2 и 5 взаимодействует с иоворотными упорами 4 и 5 нащечин , которые смонтированы на корпусе 8.
На рычагах 11 закреплены рычаги М-16 с заводными пружпнами 17-19.
Рычаг 14 выполнен с хвостовиком 20 и выступом 21, рычаг 15 - с выступами 22 и 23. Выступ 22 имеет торцовые иоверхности а и б. Рычаг 16 изготовлен с хвостовиками 24 и 25. На нащечинах в и 7 установлены выполненные за одно целое с ними выстуиы 26 и 27. Ходовой винт / присоединен карданной передачей 28 и валиком 29 со шлицами к муфте 30 электродвигателя 31.
Нолзуны 2 и 3 имеют упоры 32 и-ЗЗ. Тарельчатые пружины 10 взаимодействуют с диском 34, прикрепленным ко втулке 35. Втулка сопряжена с резьбовыми упорами 36 и 37, соединенными на осях с рычагами 12 и 13. Рычаги 12 подвижными осями 38 соединены с рычагами //, рычаги 13 неиодвижными осями 39 соединены с фундаментом 40 механизма. Рычаги // неиодвижными осями 41 также соединены с фундаментом 40.
Рычаги 14-16 осями 42-44 присоединены к кронштейнам 45, выполненным за одно целое с рычагами 11. Нащечины 6 п 7 присоединены к корпусу стоиора осями 46, на которых надеты заводные 47.
вая вместе с этим нащечнны 6 и 7 около оеей 46.
Ползуны при дальнейшем перемещении внутрь своими унорами 32 иодойдут к концам рычагов 13, в результате чего рычаги начнут поворачиваться около неподвижных осей 39, перемещая унор 36 с втулкой 35 и диском 34 вдоль стакана 9, сжимая пружины 10.
Одновременно с этим упор 37, воздействуя с помощью подвижных осей 38 на рычаги 12, будет поворачивать рычаги 11 с находящимися на них рычагами 14--16 с заводными пружинами /7-19 около неподвижных осей 41.
Нащечины 6 и 7, поворачиваясь под воздействием ползунов 2 и 3, своими выступами 27 поворачивают хвостовики 24 рычагов 16 около своих осей 44, выводя их из зацепления с выстуиами 23 на рычагах 15, и заводят свои иружины 19.
Как только рычаги 16 выйдут из зацепления с рычагами 15, последние с помощью своих иружин 18 моментально повернутся около своих осей 43 и торцовой поверхностью а упрутся в выступы 26 на нащечинах 6 и 7. Вместе с этим рычаги 14, поворачиваясь с помощью своих иружин 17 около осей 42, выстуиами 21 после скольжения ио выстуиам 22 рычагов 15 упрутся в торцовую иоверхность б этих рычагов. Тарельчатые пружины при подходе ползунов 2 к 3 G крайнее внутреннее положение // полностью сожмутся, при этом рычаги 15 торцовой иоверхностью а упрутся в выступы 26 на ,ечинах 6 и 7, и вся нагрузка от сжатых пружин 10 воздействием рычагов 11 и 12 воспримется поворотными упорами 4 п 5 нащечпн 6 и 7, в результате чего зажмется якорная цепь. Стопор закрыт. Открытие стопора производится в обратном порядке.
Предмет изобретения
Фрикционный стоиор для закреиления якорной цеии с дистанционным ириводом, состоящий из ходового винта с ползунами и поворотными упорами с нащечинами, смонтированН1)1ми на кориусе, тарельчатых иружин и рычагов, отличающийся тем, что, с целью уменьшения мощности приводного электродвигателя и обесиечения автоматического стопорения и отдачи якорной цеии, в двойных вогнутых ирорезях нащечин установлены ползуны с упорами и кулачковыми выступами, взаимодействующими с выступами рычагов, смонтированных на парных рычагах, кинематически сопряженных с рычагами заводки тарельчатых пружин так, что при нахождении ползунов в крайнем внутреннем положении тарельчатые иружины нагружены и стоиорят якорную цеиь, а при нахождении в крайнем внещнем положении освобождают ее для выборки и постановки якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ВЫКЛЮЧАТЕЛЯ | 1969 |
|
SU237947A1 |
| Контейнерный стопор | 1972 |
|
SU473656A1 |
| Стопорное устройство для вагонеток, устанавливаемых в опрокидные клети шахтных подъемников | 1950 |
|
SU89553A1 |
| ЦЕНТРАЛЬНЫЙ ФОТОЗАТВОР | 1970 |
|
SU269702A1 |
| ПРИВОДНОЙ БЛОК ВЫСОКОВОЛЬТНОГО ВЫКЛЮЧАТЕЛЯ | 1967 |
|
SU196963A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Автоматический регулятор амплитуды колебаний баланса часовых механизмов | 1949 |
|
SU85108A1 |
| ПОСЛЕДОВАТЕЛЬНО-ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU392525A1 |
| Автомат для сборки наконечников гибких шлангов | 1984 |
|
SU1186454A1 |
| Механический таймер | 1989 |
|
SU1675842A1 |
Верхнее и Hi///fffee йижуйда бинто 2 25 26 16 4,л /1 Ш /.,-«
