Изобретение относится к области метеорологического приборостроения.
Известны устройства, предназначенные для измерения параметров ветра, содержащие флюгарку, которая укреплена на оси вращения наружной рамки гироскопического устройства, датчик угла, укрепленный на оси вращения Внутренней рамки и электрически связанный с датчиками момента, установленными на осях вращения наружной « внутренией рамок. Подобные устройства позволяют измерять только интегральное направление -ветра, скорость же ветра этим прибором измерить невозможно.
В предложенном устройстве датчик угла, установленный на оси наружной рамки приемника ветра, соединен с датчиком момента, установленным на оси внутренней рамки гироскопического устройства. Это дает возможность измерить составляющую среднего вектора ветра в .направлении ориентации флюгарки, которая сохраняет неизменным свое направление в пространстве. Использование трех аналогичных устройств, ориентированных взаимно ортогонально, позволяет измерять суммарное значение вектора ветра за выбранный интервал времени.
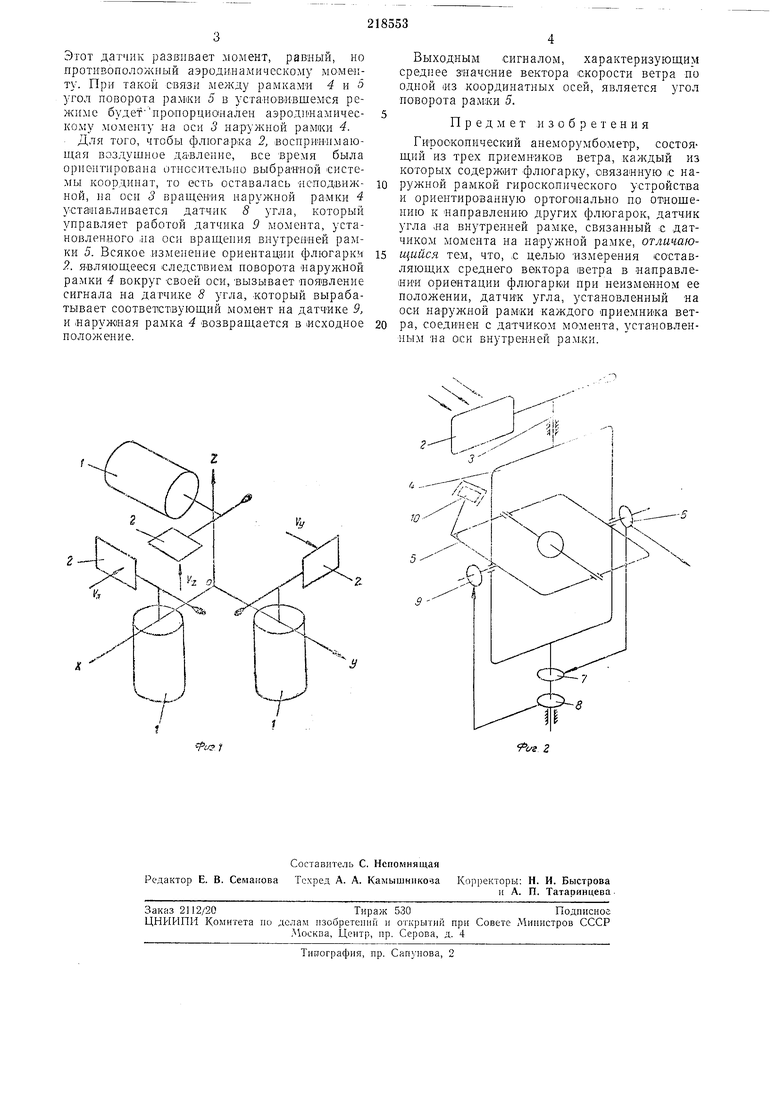
Па фИГ. 1 приведена схема размещения трех идентичных приемников скорости и направления ветра по осям координат; на фи.г. 2 -
кинематическая схема приемника.
Приемники / располагаются так, что их флюгарки 2 воспринимают составляющие вектора ветра по трем взаимно ортогональным
осям координат ОХ, ОУ, OZ, флюгарка 2 укреплена на оси 3 вращения наружной рамки 4 гироскопического устройства. Па внутренней рамке 5 установлен датчик 6 угла, связанный с датчиком 7 момента, расположенным на оси
вращения 1наруж1ной рамки 4. С осью вращения наружной рамки 4 соединен датчик 8 угла, связанный с датчиком 9 момента, расположенным на оси (Вращения внутренней рамки 5. Для улучщения динамических характеристик устройства с внутренней рамкой 5 связан демпфер 10.
Составляющая воздушного потока создает на оси 3 момент, который стремится развернуть наружную рамку 4, но в силу гироскопических свойств иач инает прецессировать внутренняя рамка 5. Угол поворота внутренней рамки 5 пропорционален интегралу от действующего момента на оси L и поэтому может достигать любой величины. Для обеспечения
работоспособности гироскопа угол поворота внутренней рамки не должен быть больще 30-40°. Поэтому в целях компенсации аэродинамического момента на оси вращения внутренней рамки установлен датчик 6 угла, коЭтот датчик развивает момент, равный, но противоположный аэродЕнамическому моменту. При такой связи между рамками 4 и 5 угол поворота рам1ки 5 в устаНОв«вшем€я режиме будетпр0порцио1иален аэродинамическому моменту на оси 3 наружной рамки 4.
Для того, чтобы флюгарка 2, восири имаюгцая воздушное да-влеине, все время была ориентирована относительно выбранной системы коордииат, то есть оставалась неподвижной, на оси 3 вращения наружной рамки 4 устанавливается датчик 5 угла, который управляет работой датчика 9 момента, установленного на оси вращения внутренней рамки 5. Всякое изменение ориентации флюгаркм .. являющееся следствием поворота нарул ной рамки 4 вокруг своей оси, вызывает появление сигнала на датчике 8 угла, который вырабатывает соответствующий момент на датчике 9, и .наружная рамка 4 возвращается в исходное положение.
Выходным сигналом, характеризующим среднее значение вектора скорости ветра но одной 1ИЗ координатных осей, является угол поворота рамки 5.
т-г
Предмет изобретения
Гироскопический анеморумбомерр, состоящий из трех приемников ветра, каждый из которых содержит флюгарку, связанную с наружной рамкой гироскопического устройства и ориентированную ортогонально но отнощению к направлению других флюгарок, датчик угла ,на внутренней рамке, связанный с датЧИКОЛ1 момента на наружной рамке, отличающийся тем, что, с целью измерения составляющих среднего вектора ветра в направлении ориентации флюгарки при неизменном ее положении, датчик угла, установленный на оси наружной рамки каждого приемника ветра, соединен с датчиком мОмента, установленным на оси внутренней рамки.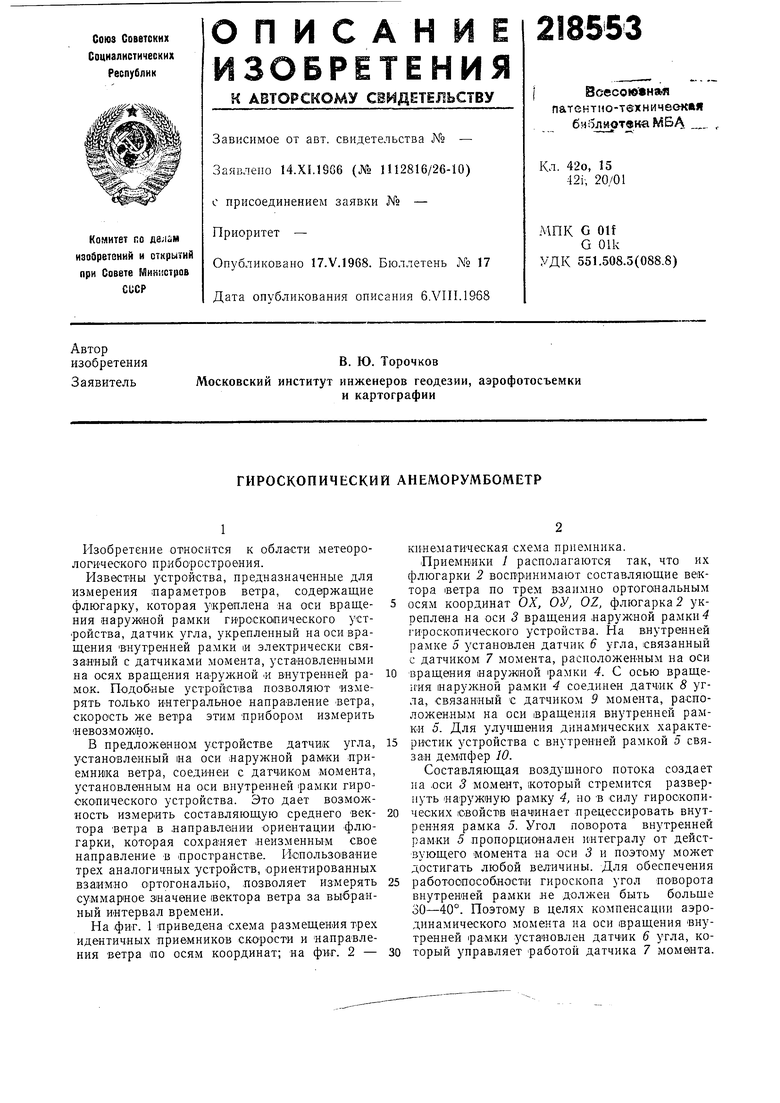
9
