Известен аппарат автоматического управления наборной строкоотливной машиной, имеющий главный вал, кодовые и регистровую линейки, нажимные .рычаги, взаимодействующие с механизмом воздействия на матрицевьшускающий механизм.
Предложенный аппарат отличается от известного тем, что механизм воздействия на матрицевыпускающий механизм выполнен в виде подпружиненных управляемых штанг, связанных с главным валом через винтовые шестерни, кулачок и двунлечий рычаг, на одном плече которого расположен ролик, взаимодействующий с кулачком, а другое илечо которого несет нажимную иланку, взаимодействующую с управляемыми штангами.
Указанное отличие повышает надежность работы аппарата и исключает возможность ложного срабатывания его.
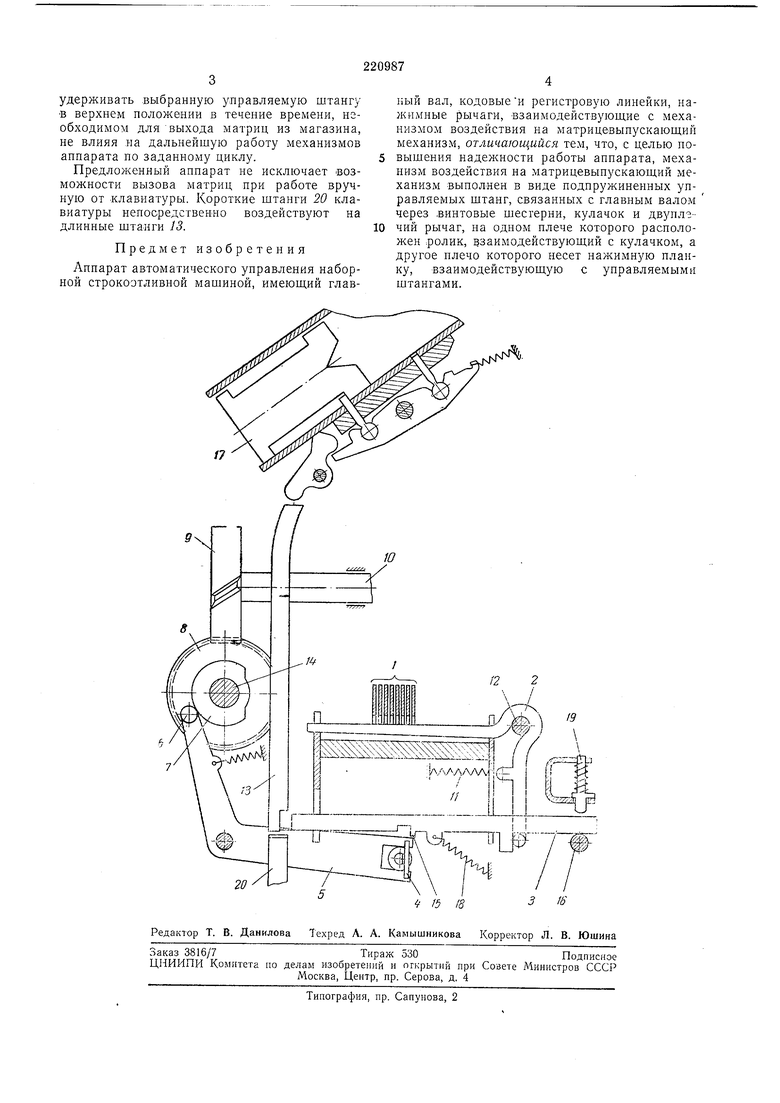
Па чертеже представлена принципиальная схема атапарата управления с непосредственным воздействием на длинные штанги рамки штанг, минуя клавиатуру.
Аппарат включает кодовые и регистровую линейки J, нажимные рычаги 2, управляемые штанги 3, нажимную планку 4, двуплечий рычаг 5, ролик 6, кулачок 7, винтовые шестерни 8 и 9, главный вал 10.
ствующей установки кодовых и регистровой линеек 1 один из нажимных рычагов 2 западает под действием пружины // в образовавшийся сквозной иаз (не показан) в кодовых линейках.
При развороте рычага 2 на оси 12 on воздействует на управляемую штангу 3, перемещая ее влево нод длинную штангу 13 рамки штанг. Па оси 14 закреплен кулачок 7, получающий привод через иару винтовьГх шестерен 8 п 9 от главного вала 10 аппарата управления. От кулачка 7 рычаг 5 получает качательное движение, а нажимная иланка 4 - возвратно-ноступателыюе вверх и вниз. Вес управляемые штанги 3, кроме выдвин лой внеред, не поднимутся, так как планка 4 свободно проходит в пазы штанги 3. Последняя, выдвинутая вл-:во и поднятая планкой 4 за выступ 15, разворачивается относительно оси 16, левым конном поднимая длинную штангу 13 рамки штанг, которая непосредственно воздействует на ударник .матрицевыпускающего механизма, осуществляя тем самым вызов матрицы 17. По окончании цикла нажимная иланка 4 опускается в исходное положение и штанга 3 пружиной 18 возвращается в исходное .положение. Па штанге 3 избыток хода планки 4 поглощается пружинным амортизатором 19.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления строкоотливной наборной машиной | 1960 |
|
SU136389A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНОЙ | 1970 |
|
SU268769A1 |
| НАВОРНО-ПРОГРАММИРУЮЩИЙ АППАРАТ | 1971 |
|
SU311779A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНЫ | 1971 |
|
SU424742A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ «ШПАС» | 1969 |
|
SU236971A1 |
| МАТРИЦЕНЕСУЩЕЕ УСТРОЙСТВО БУКВООТ НАБОРНЫХ МАШИН | 1966 |
|
SU182740A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| ВС.ЕСОЮЗИЛЯ О ПАТЕНТНО-•Ч'-''':ГГ\'" 1 | 1964 |
|
SU164616A1 |
| АГРЕГАТ ДЛЯ ИЗГОТОВЛЕНИЯ ШТУЧНЫХ ИЗДЕЛИЙ | 1966 |
|
SU187619A1 |
| ВНУТРЕННИЙ МЕХАНИЗМ УПАКОВОЧНОЙ МАШИНЫ | 2013 |
|
RU2616829C2 |
