Устройство предназначено для использования на драгах.
Для обеспечения одновременного контроля скорости, местоположения и автоматизации процесса маневрирования драги электронная схема предложенного устройства снабжена установленной над рабочей сваей драги вращающейся фотоголовкой, оптически связанной с береговым источником света и электрически через усилитель - с двигателем носовой лебедки и задатчиком скорости. Задатчик подключен к двигателю вращения фотоголовки и кинематически соединен с тахогенератором, питающим указатель скорости поворота. В качестве берегового источника света использован лазер.
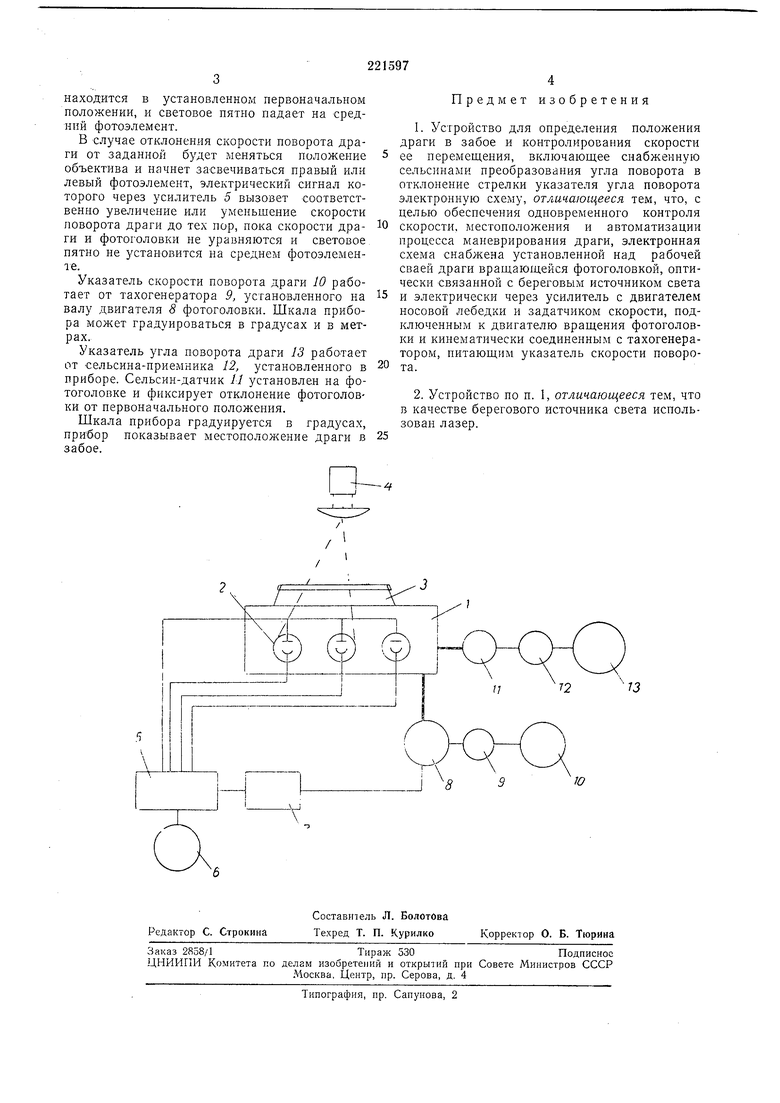
На чертеже изображена схема фотоэлектронного устройства.
Фотоэлектронная головка 1 снабжена фотоэлементами 2, объективом 3 оптически связана с береговым источником света 4 и электрически через усилитель 5 с двигателем носовой лебедки 6 и задатчиком скорости 7. Задатчик связан с двигателем 8, вращающим фотоголовку и кинематически соединенным с тахогенератсром 9, питающим указатель 10 скорости перемещения. Фотоголовка / связана с сельсиндатчиком 11, фиксирующим угол поворота фотоголовки и соединенным через сельсин-приемник 12 с указателем угла поворота 13.
Принцип работы устройства заключается в следующем. После подшагивания драги фотоголовка устанавливается над сваей, вокруг которой драга вращается. Объектив 3 фотоголовки ориентируется на точечный источник света 4, например лазер, установленный на берегу, световое пятно которого попадает на средний фотоэлемент 2, включающий устройство в работу. Фотоэлементы расположены таким образом, что засвечиваться может либо один средний, либо средний и один из крайних. При уходе светового пятна со среднего фотоэлемента установка отключае1ся, и подается световой сигнал. Для точной установки светового пятна
на стекле объектива 3 очерчена граница, просматриваемая средним фотоэлементом. После установки светового пятна задатчик 7 устанавливает скорость бокового перемещения драги, а стрелка указателя поворота драги устанавливается на нуль. Па этом подготовка устройства к работе закапчивается.
Одновременно включается двигатель 6 носовой лебедки и двигатель 8 фотоголовки. Фотоголовка вращается в направлении противоположном направлению вращения драги с постоянной заданной скоростью.
Если скорость бокового перемещения драги равна заданной, то она равна и скорости вращения фотоголовкп. Поскольку они вращаются
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯ iiATj;HTHO-iEXKii4[:i{ | 1973 |
|
SU361255A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Двухканальный светоприемник для управления положением машины | 1978 |
|
SU723124A2 |
| Фотоэлектрическая следящая система, например, для копирования по чертежу | 1957 |
|
SU120351A1 |
| Устройство управления положением драги в забое | 1980 |
|
SU870592A1 |
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Устройство для контроля перекоса уточных нитей в ткани | 1990 |
|
SU1747557A1 |
| Устройство для контроля скорости бокового перемещения свайной драги | 1985 |
|
SU1288273A1 |
| Двухканальный светоприемник для управления положением машины | 1976 |
|
SU613104A1 |
| Устройство для определения положения драги в забсе | 1977 |
|
SU594252A2 |
