Известен способ управления приводами копировальных станков с фотоэлектронным копированием, при котором сигналы с фотозадающего устройства разлагают на координатные составляющие и подают на обмотку якоря двигателей привода координат, перемещающих инструмент относительно изделия и фотозадающее устройство относительно копира.
Новизной предлагаемого способа является то, что в систему привода вводят блок преобразователя с двигателем, на обмотку управления которого подают сигналы с фотозадающего устройства; при этом сигналы, выработанные блоком преобразователя, сдвинутые один относительно другого на 120°, усиливают и по трем самостоятельным каналам подают на обмотку управления шагового двигателя перемещения инструмента и шагового двигателя перемещения фотозадающего устройства.
Предлагаемый способ обеспечивает повышение производительности копировальных машин.
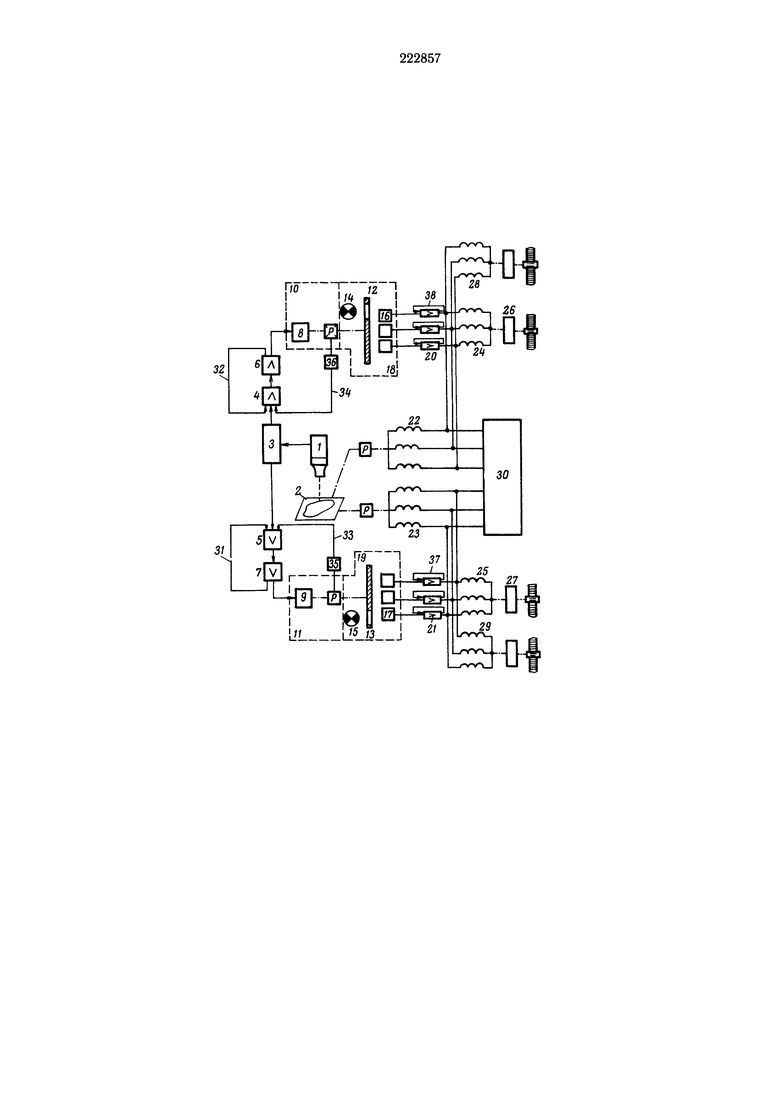
На чертеже показан способ управления приводами перемещения инструмента для фотоэлектронной копировальной газорежущей машины.
В систему привода инструмента копировальной машины входят: фотоэлектронное задающее устройство 1, копир-чертеж 2, блок 3 разделения на координатные составляющие, блоки 4 и 5 усиления напряжения, блоки 6 и 7 усиления мощности, двигатели 8 и 9 малой мощности, блоки-преобразователи 10 и 11, модулирующие диски 12 и 13, источники 14 и 15 света, фотоэлементы 16 и 17, преобразователи 18 и 19 угла поворота в кодовую последовательность импульсов, усилители 20 и 21, шаговые двигатели 22 и 23 приводов передвижения задающего устройства, шаговые двигатели 24 и 25 приводов перемещения резака основной машины, усилители 26 и 27 момента, шаговые двигатели 28 и 29 приводов перемещения резака вспомогательной машины, блок 30 записи программ, отрицательная обратная связь 31 и 32 по напряжению, отрицательная обратная связь 33 и 34 по скорости, тахогенераторы 35 и 36, положительная обратная связь 37 и 38.
Предлагаемый способ состоит в следующем.
Сигналы фотоэлектронного задающего устройства 1, отражающие положение копируемого участка контура относительно осей координат, разделяют на координатные составляющие в блоке 3, затем координатные составляющие усиливают по напряжению в блоках 4 и 5 и по мощности - в блоках 6 и 7.
Усиленные по напряжению и по мощности координатные составляющие управляют двигателями 8 и 9 малой мощности (мощность 10-20 Вт) блоков преобразователей 10 и 11.
Скорость и напряжение вращения валов двигателей 8 и 9, отражающие скорость и направление копирования, преобразуют в кодовую последовательность импульсов по трем каналам управления, частота которых отражает скорость, а порядок следования - направление копирования. Модулирующие диски 12 и 13 вращают между источниками 14 и 15 света и фотоэлементами 16 и 17. Благодаря этому преобразователи 18 и 19 угла; поворота в кодовую последовательность импульсов вырабатывают П-импульсы со скважностью равной двум, сдвинутые по фазе один относительно другого на 120°. Затем П-импульсы усиливают по напряжению и по мощности в усилителях 20 и 21 и подают на шаговые двигатели 22 и 23 приводов перемещения задающего устройства и шаговые двигатели 24 и 25 приводов перемещения резака.
Вращение вала шаговых двигателей 24 и 25 передают, например, через гидроусилители момента 26 и 27 исполнительной координатной системе, перемещающей резаки (можно использовать силовой шаговый привод).
Так как шаговый привод обладает строго идентичными регулировочными характеристиками, то сигналы задающего устройства одной машины могут поступать одновременно на приводы перемещения резака в плоскости разрезаемого листа нескольких машин. В этом случае сигналы усилителя 20 и 21 подают одновременно на шаговые двигатели 24 и 25 основной машины и на шаговые двигатели 28 и 29 вспомогательной машины. Таких машин может быть несколько.
Статическую точность и динамическую устойчивость двигателей 8 и 9 получают путем подачи отрицательных обратных связей 31 и 32 по напряжению и по скорости (33 и 34) в блоки усиления 4, 6 и 5, 7. Для этой цели с валами двигателей 8 и 9 кинематически связывают тахогенераторы 35 и 36, напряжение которых подают соответственно на вход блоков 4 и 5 усиления.
Высокую чувствительность схемы управления шаговыми двигателями получают путем подачи сигналов положительных обратных связей 37 и 38 с выхода усилителей 20 и 21 на их вход.
Полная аналогия сигналов управления приводами перемещения инструмента копировальных и программных машин позволяет использовать сигналы копировальной системы управления для изготовления программ и их контроля. Для записи контура на программоноситель в процессе копирования сигналы с усилителей 20 и 21 одновременно поступают на шаговые двигатели 22 и 23 задающего устройства копировальной системы и в блок 30 записи программ.
Для этой цели может использоваться, например, пульт записи типа ПЗК. Сигналы усилителей 20 и 21 через согласующие усилители пульта записи типа ПЗК поступают на записывающие головки лентопротяжного механизма. Таким образом можно записать на магнитную пленку сигналы управления шаговыми двигателями для любого контура.
Для контроля программ сигналы со считывающего устройства системы программного управления поступают на входы усилителей 20 и 21. Шаговые двигатели 22 и 23 задающего устройства перемещают самописец относительно листа бумаги, на котором вычерпывается запрограммированный контур.
Идентичность способов управления приводами перемещения инструмента копировальных и программных машин позволит полностью унифицировать конструкции и схемы приводов этих машин.
Так как сигналы копировальной системы, управляющие двигателем малой мощности, электромеханическая постоянная времени которого мала, дальше преобразуются в цифровую форму и управляют шаговыми приводами, являющимися практически безынерционными элементами, то предлагаемый способ управления позволит увеличить скорость копирования при сохранении точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| И. М. Э. Г. Моторов, А. С. Федотов, А. М. Федоров, А. С. Еи Г. Н. Петров | 1970 |
|
SU259606A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1969 |
|
SU244105A1 |
| СПОСОБ ЗАПИСИ НА ПОВЕРХНОСТЬ МАСШТАБИРОВАННОЙ КОПИИ ИЗОБРАЖЕНИЯ-ОРИГИНАЛА | 1994 |
|
RU2074410C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДАМИ КОПИРОВАЛЬНОГО СТАНКА | 1970 |
|
SU278361A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1964 |
|
SU166226A1 |
| Устройство для управления металлорежущим станком | 1978 |
|
SU746421A1 |
| Фотокопировальная система | 1974 |
|
SU484067A1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| Устройство для электроэрозионной обработки по копиру | 1982 |
|
SU1263455A1 |
Способ управления приводами копировальных станков с фотоэлектронным копированием, при котором сигналы с фотозадающего устройства разлагают на координатные составляющие и подают на обмотку якоря двигателей привода координат, перемещающих инструмент относительно изделия и фотозадающее устройство относительно копира, отличающийся тем, что, с целью повышения производительности копировальных машин, сигналы с фотозадающего устройства подают на обмотку управления блока преобразователя, при этом сигналы, выработанные блоком преобразователя, сдвинутые один относительно другого на 120°, усиливают и по трем самостоятельным каналам подают на обмотку управления шагового двигателя перемещения инструмента и шагового двигателя перемещения фотозадающего устройства.
