Известны грузозахватные устройства, содержандие корнус, шарнирно соединенный с подвеской грузоподъемной машины и несущий механизм захвата, прибор для контроля положения в пространстве поднимаемого груза и механизм для балансировки груза. Эти устройства не обеспечивают строгой ориентации груза по месту его установки и изменения положения центра тяжести устройства вместе с грузом относительно точки подвеса.
В предложенном устройстве механизм для балансировки груза выполнен в виде верхней и нижней кареток с возможностью их перемещения в двух взаимно перпендикулярных направляющих. Верхняя каретка перемещается по направляющим, расположенным на плите, несущей щарнир подвески, а нижняя, несущая механизм захвата и прибор для контроля полол ения в пространстве поднимаемого груза, - по направляющим, расположенным на верхней каретке.
Такое выполнение грузозахватного устройства обеспечивает изменение положения груза с нессиметричным расположением центра тяжести путем изменения положения центра тяжести грузозахватного устройства вместе с грузом относительно точки подвеса и строгую ориентацию груза по месту его установки.
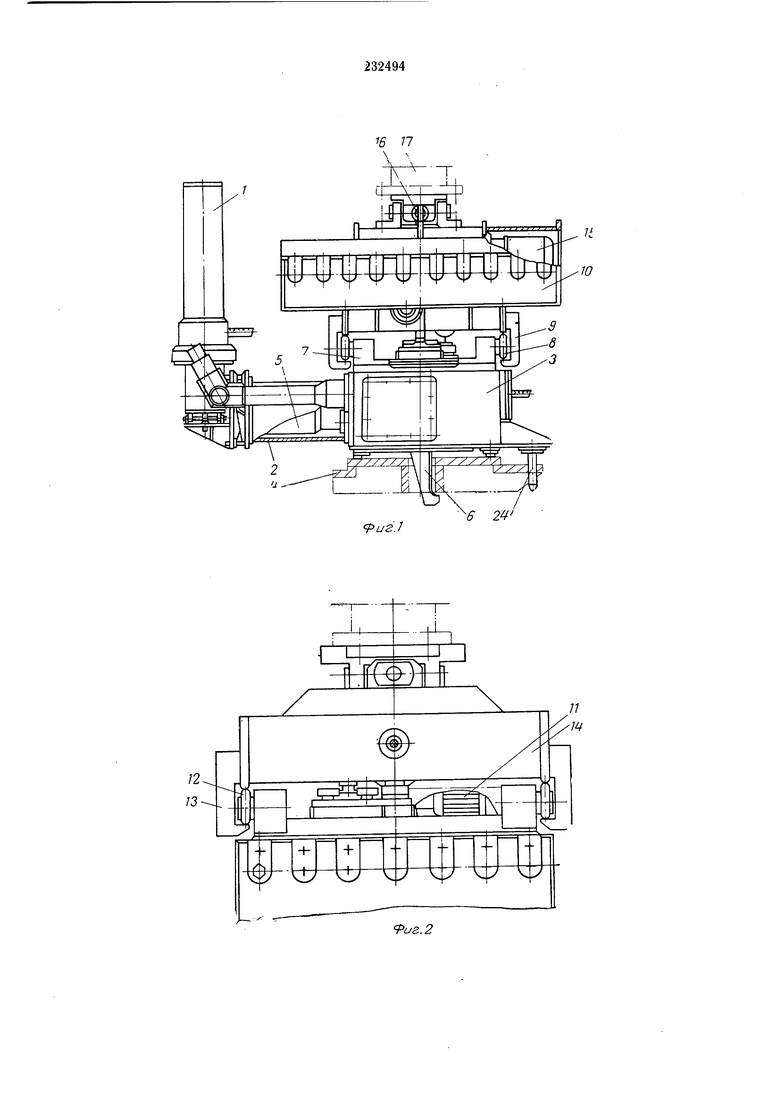
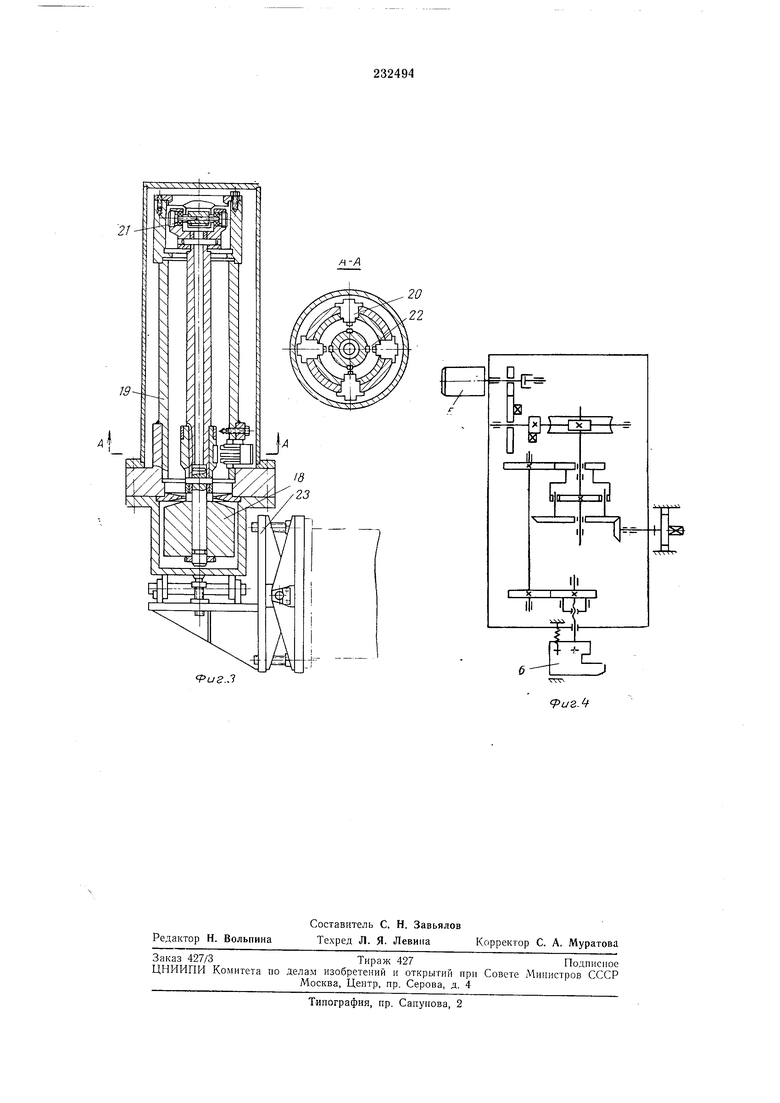
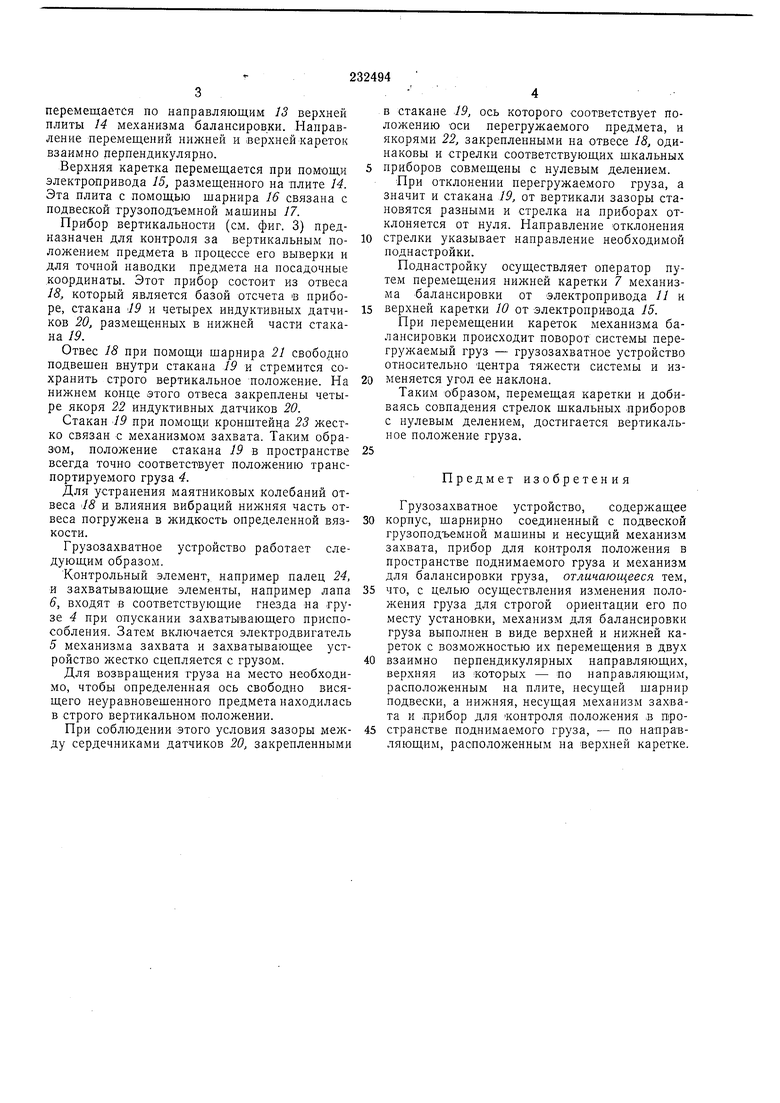
Па фиг. 1 изображена схема захватывающего устройства, вид спереди, на фиг. 2 - то же, вид сбоку на механизм балансировки; па фиг. 3 - то же, продольный разрез нрибора вертикальности; на фиг. 4 - то же, механизм захвата.
Грузозахватное устройство состоит из прибора вертикальности 1, который крепится к корпусу 2, механизма захвата 3, жестко сцепляемого с перегружаемым грузом 4.
Привод механизма захвата осуществляется от электродвигателя 5, расположенного в корпусе 2. Сцепление с перегружаемым грузом происходит при возвратно-поступательном
движении сменного элемента-лапы 6, сообщаемым механизмом захвата, прннцпп альная схема которого дана на фиг. 4.
В зависимости от формы перегрул аемого груза механизм захвата снабжен соответствующими сменными исполнительными органами, в частности лапой 6. Можно и полностью заменить механизм захвата другим необходимым захватом. Механизм захвата крепится к нижней каретке 7 механизма балансировки. Эта каретка на роликах 8 перемещается по направляющи.м 9 верхней каретки 10 . 1еханизма балансировки. Пижняя каретка перемещается при помощи электропривода 11, размещенного на перемещается по направляющим 13 верхней плиты 14 механизма балансировки. Направление неремещепий нижней и верхней кареток взаимно перпендикулярно. Верхняя каретка перемещается при помощи электропривода 15, размещенного на плите 14. Эта плита с помощью щарнира 16 связана с подвеской грузоподъемной машины 17. Прибор вертикальности (см. фиг. 3) предназначен для контроля за вертикальным положением предмета в процессе его выверки и для точной наводки предмета на посадочные координаты. Этот прибор состоит из отвеса 18, который является базой отсчета в нриборе, стакана 19 и четырех индуктивных датчиков 20, размещенных в нижней части стакаОтвес 18 при помощи шарнира 21 свободно подвешен внутри стакана 19 и стремится сохранить строго вертикальное положение. На нижнем конце этого отвеса закреплены четыре якоря 22 индуктивных датчиков 20. Стакан 19 при помощи кронштейна 23 жестко связан с механизмом захвата. Таким образом, положение стакана 19 в нространстве всегда точно соответствует положению транспортируемого груза 4. Для устранения маятниковых колебаний отвеса 18 и влияния вибраций нижняя часть отвеса погружена в жидкость определенной вязГрузозахватное устройство работает следующим образом. Контрольный элемент, например палец 24, и захватывающие элементы, например лапа 6, входят в соответствующие гнезда на грузе 4 при опускании захватывающего приспособления. Затем включается электродвигатель 5 механизма захвата и захватывающее устройство жестко сцепляется с грузом. Для возвращения груза на место необходимо, чтобы определенная ось свободно висящего неуравновешенного предмета находилась в строго вертикальном положении. При соблюдении этого условия зазоры между сердечниками датчиков 20, закрепленными в стакане 19, ось которого соответствует поожению оси перегружаемого предмета, и якорями 22, закрепленными на отвесе 18, одинаковы и стрелки соответствующих шкальных приборов совмещены с нулевым делением. При отклонении перегружаемого груза, а значит и стакана 19, от вертикали зазоры становятся разными и стрелка на приборах отклоняется от нуля. Направление отклонения стрелки указывает направление необходимой поднастройки. Поднастройку осуществляет оператор путем перемещения нижней каретки 7 механизма балансировки от электропривода // и верхней каретки 10 от электропривода 15. При перемещении кареток механизма балансировки происходит поворот системы перегружаемый груз - грузозахватное устройство относительно центра тяжести системы и изменяется угол ее наклона. Таким образом, перемещая каретки и добиваясь совпадения стрелок шкальных .приборов с нулевым делением, достигается вертикальное положение груза. Предмет изобретения Грузозахватное устройство, содержащее корпус, шарнирно соединенный с подвеской грузоподъемной машины и несущий механизм захвата, прибор для контроля положения в пространстве поднимаемого груза и механизм для балансировки груза, отличающееся тем, что, с целью осуществления изменения положения груза для строгой ориентации его по месту установки, механизм для балансировки груза выполнен в виде верхней н нижней кареток с возможностью их перемещения в двух взаимно перпендикулярных направляющих, верхняя из которых - по направляющим, расположенным на плите, несущей шарнир подвески, а нижняя, несущая механизм захвата и л:рибор для контроля положения в nipoстранстве поднимаемого груза, - по направляющим, расположенным на верхней каретке.
fue.1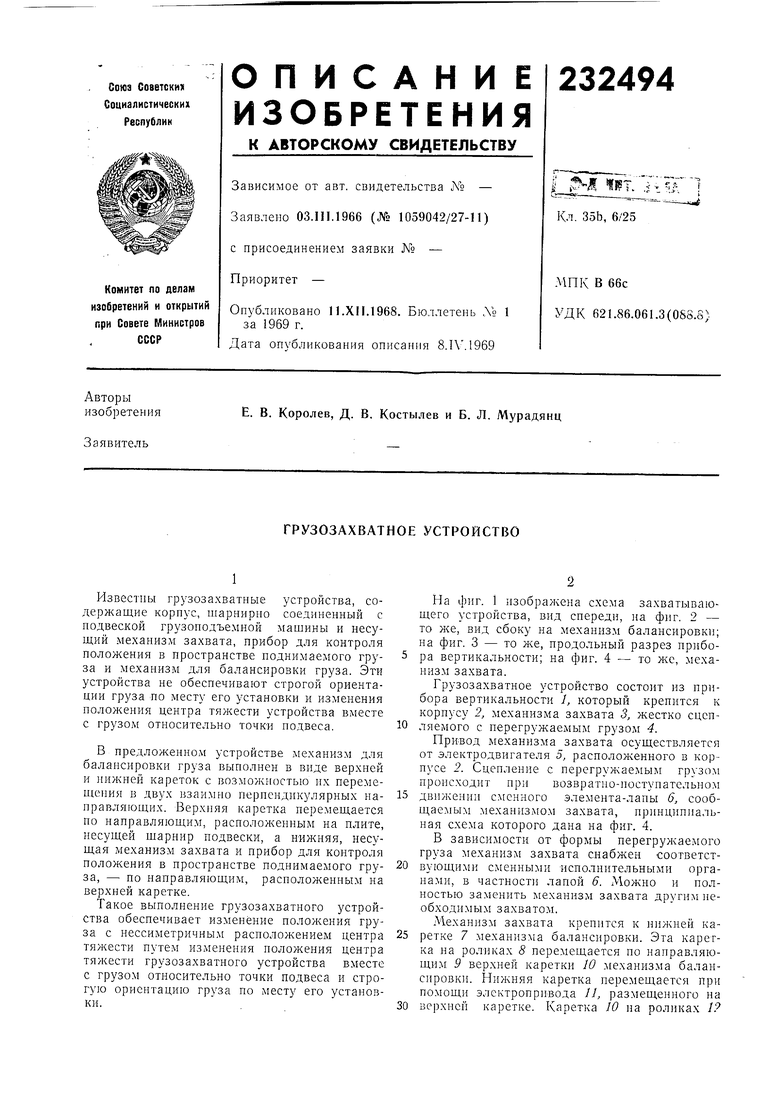
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Грузозахватное устройство для подъема штучных грузов коробчатого сечения | 1974 |
|
SU550330A1 |
| ГРУЗОСТРАХОВОЧНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЭЛЕКТРОМАГНИТНОЙ ТРАВЕРСЫ | 2005 |
|
RU2293055C1 |
| Захватное устройство для контейнеров | 1980 |
|
SU937314A2 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| Грузозахватное устройство | 1986 |
|
SU1386548A1 |