(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО
КОНТРОЛЯ НЕИСПРАВНОСТЕЙ АВТОПИЛОТА
Изобретение относится к авиационному оборудованию и может быть использовано в системе автоматического управления полетом самолета. В основном авт. свид. № 2О5572 описано устройство для автома тического контроля неисправностей автопи- лота Оно включает релейный усилИтель, нагруженный на индикатор, генератор колебаний низкой частоты, подключенный между датчиком угла и выходом усилителя сервопривода и создакиций колебания низкой частоты в выходном напряжении усилителя сервопривода. Кроме того, имеется блок контроля колебаний низкой частоты, подключенньй к магнитному усилителю.
Однако такие устройства вызывают ложное срабатывание индикатора, фиксирующего неисправности системы управления при исправно работающем автопилоте, и отклонение управляющих поверхностей до предель но допустимых значений, вызывающих предельные режимы пилотирования самолета.
позволяет исключить ложное срабатывание блока контроля колебаний низкой частоты, вызьгоающее отключение исправного автопилота при изменении отклонений самолета по углу крена.
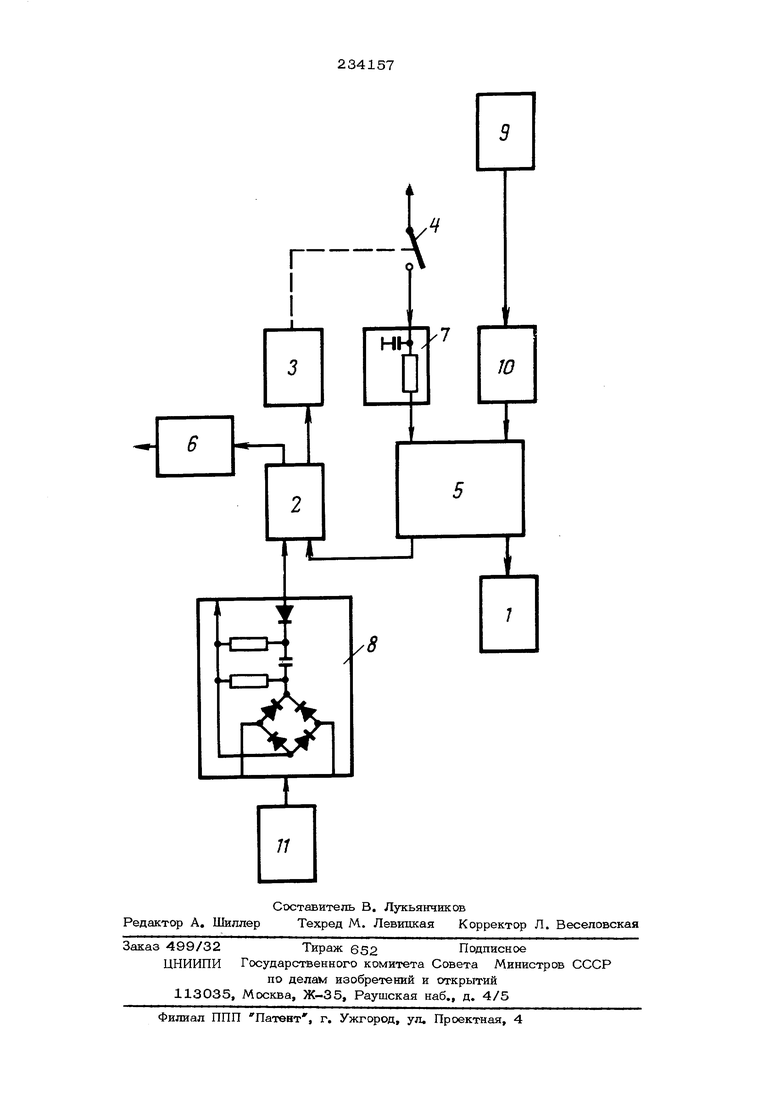
Это достигается тем, что к выходу блока контроля колебаний низкой частоты подключено электромагнитное реле, коммутирующее своими контактами входную пепь контура управления к усилителю сервопривода, введен сглаживающий фильтр, формирующий сигнал управления при отключении цепи контура управления от датчиков измерения регулируемых величин и подсоединенный между контактами указанного реле и входом усилИтеля сервопривода, а блок контроля колебаний низкой частоты снабжен корректором, выполненным в форме дифференцирующей 5гчейки и диодного мотового преобразователя, связанного с датчиком крена. Оно содержит следующие основные функциональные узлы: рулевую машину 1, блок 2 контроля колебаний низкой частоты, электромагнитное реле 3, коммутирующее своими контактами 4 входную цепь усилителя 5 сервопривода рулевой машины, временное реле 6, включаюшее индикатор отк зов, сглаживающий фильтр 7 прямой цепи контура управления, корректор 8, связанны с датчиком 9 углов крена, в прямой цепи которого включен генератор 10 колебаний низкой частоты, или с датчиком 11. При резком возрастании сигнала крена рулевая машина 1 не скомпенсирует входной сигнал и блок 2 контроля колебаний низкой частоты выдает сигналы на срабатьюание реле 3, коммутирующего своими контактами 4 входную цепь контура управления к усилителю 5 сервопривода руле вой машины, и временное реле 6 включает индикатор отказа с задержкой времени. На вход усилителя будет подаваться сигнал от разрядки конденсатора сглаживающего фильтра 7, обеспечивая нормальное функционирование автопилота, и блок контроля низкой частоты снимает сигналы с вре менного и электромагнитного реле. Послед нее своими контактами коммутирует цепь контура управления, подключая первичные иамерители параметров. В результате процесс будет повторяться на увеличение угла крена до заданного значения. Когда угол крена уменьшается медленно, корректор 8 вырабатывает сигнал с помощью мостового диодного преобразователя, связанного с датчиком углов крена, в прямой цепи которого включен генератор колебаний низкой частоты, и взаимодейст вует на блок контроля низкой частоты .исключающий срабатьгаание временного и элек-тромагнитного реле. Формула изобретения Устройство для автоматического контроля неисправностей автопилота по авт. свид, № 205572, отличающееся тем, что, с целью исключения ложного срабатывания блока контроля колебаний низкой частоты, вызывающего отключение исправного автопилота при изменении отклонений самолета по углу крена, в него к выходу блока контроля колебаний низкой частоты включено электромагнитное реле, коммутирующее своими контактами входную цепь контура управления к усилителю сервопривода, введен сглаживающий фильтр, формирующий сигнал управления при отключении цепи контура управления от датчиков измерения регулируемых величин и подсоединенный между контактами указанного реле и входом усилителя сервопривода, а блок контроля колебаний низкой частоты снабжен корректором, выполненным в форме дифференцирующей ячейки и диодного мостового преобразователя, связанного с датчиком крена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля неисправностей автопилота | 1969 |
|
SU333818A1 |
| Устройство для автоматического контроля неисправностей автопилота | 1964 |
|
SU205572A1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| Устройство для автоматического отключения автопилота | 1961 |
|
SU146185A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОМПЛЕКСА КОРАБЕЛЬНОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 1998 |
|
RU2124260C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Контрольно-проверочный комплекс проверки автопилота | 2016 |
|
RU2615850C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |