Известны анализаторы переходных процессов систем автоматического управления, содерл ащие управляющий И нормирующий блоки, интеграторы и потенциометры.
Предложенное устройство отличается от известных тем, что в нем установлены преобразователи входного И выходного сигналов и подключенная к выходам двух интеграторов следящая система, выход которой связан с третьим интегратором и движком потеишюметра, подсоединенного через нормирующий блок к выходу объекта, а также с движкалш потеиниОметроБ преобразователей, подключенных ко входу и выходу объекта.
Это позволяет упростить устройство при сохранении точности определения коэффиниентов уравнения объекта при ступенчатом или произвольном воздействии.
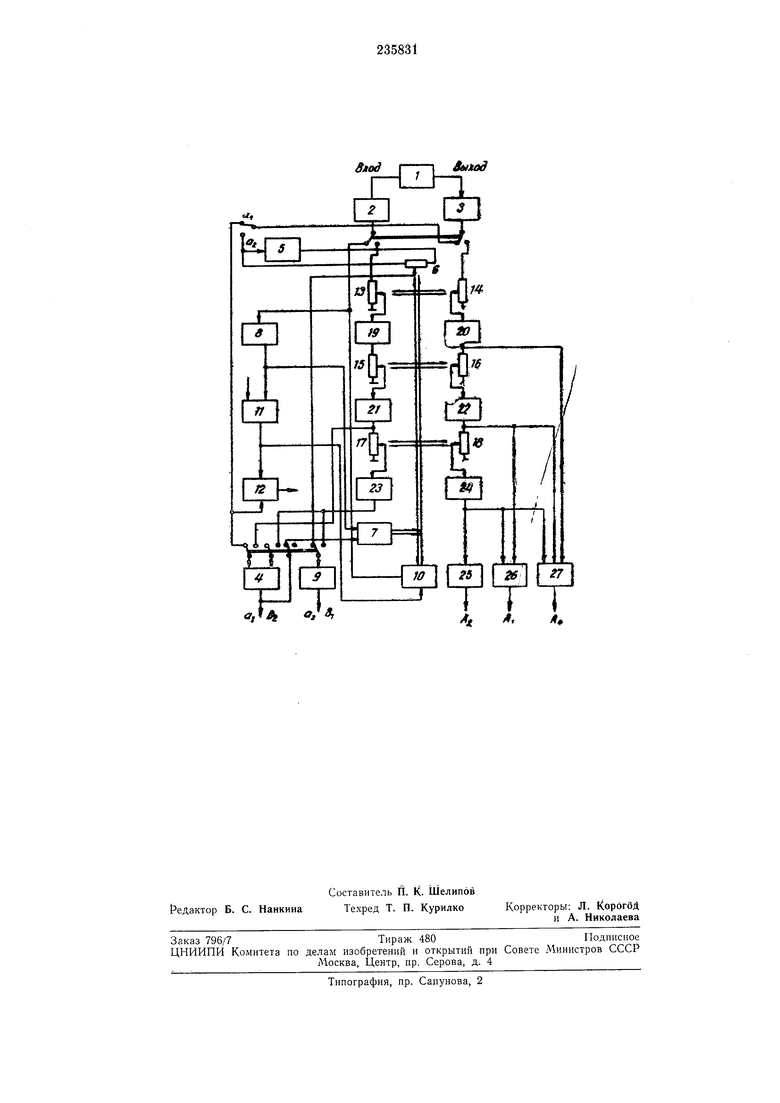
Принципиальная схема .предложенного устройства представлена «а чертеже.
В предлагаемом устройстве переходной процесс анализируется не при ступенчатой подаче, а при ступенчатом снятии сигнала на входе .испытуемого объекта /. При этом одновременно с установкой входного сигнала на масщтабном устройстве входа 2 и нормированием выходного сигнала на нормирующем блоке 3 определяется статический коэффициент К усиления испытуемого объекта; для образования необходимой для расчета разности между текущим значением переходного процесса и новым установившимся значением не требуется каких-лнбо Измерений и устройств комие)1сации.
При оиределении первого коэффицие)1та Oi передаточная функция имеет вид:
(Р} - -Т0)
1 + а,р -f дор--: оператор дифференцирования.
где /;
Пормированный по начальному значен.ию выходной сигнал поступает на интегратор 4, на выходе которого по окончании переходного
процесса устанавливается напряжение, пропорциональное коэффициенту а. При определении коэффициента а нормироваиный выходной сигнал и его инвертированное значение (с выхода инвертора 5) поступают на линей ный потенциометр 6. Движок этого потенциометра перемещается следящей систелюй 7, отрабатывающей линейно-нарастающее напряжение, выдаваемое интегратором времени 8. Начальное положение следящей
системы определяется ранее вычисленным и запомненным коэффициентом Оь Папряжение, снимаемое движком потенциометра, поступает на вход ннтегратора 9, на выходе которого благодаря такому формированию сигцссса устанавливается напряжение, лропорционалыюе коэффицие нту ЯаУлравление процессом вычисления коэффициентов ui и аг - выработка ступенчатото воздействиЯ, включение интеграторов и заиоми(натше ноказаний - осуществляется с номощью блока управления 10. Длительность процесса вычисления коэффидиептов определяется пастройкой схемы сравнения //.
Если длительность процесса вычисления оказывается меньше фактического переходного процесса, то схемой 12 двух совпадепий вырабатывается сигнал, информирующий оператора о необходимости увеличить указа пную длительность.
Таким образом, в результате однократной устаповки входного и выходного сигналов и двух воспроизведений переходного процесса в испытуемом с номощью предлага емого устройства определяются три коэффпцнепта передаточной фупкцни (1), аппроксимирующей передаточную функцию объекта. При этом осуществляется автоматпческое формирование напряжений, иитегралы от которых дают значспия коэффициентов а и «2 п автоматический контроль за соответствием между выбранным временем и фактической длительностью переходного процесса.
При цсследовации о:бъекта IB условиях произвольного воздействия входной и выходной сигналы с объекта /, проходя через м-аснп-абпое устройство входа 2 ц нормирующий блок
3,тгостунают на преобразова-телп, состоящие пз экспопенциальпых/, 14 и лииейных/5-18 потенциометров, согласующих усилителей 19-24 и следящей системы 7, спихронпо поворачивающей движкп всех потенциометров. Следящая система отрабатывает линейно-нарастающее палряжепие, вырабатываемое интегратором времени 8.
Проходя через формирующее устройство, входной ц выходной сигналы умножаются на , - ; г и , где коэффициепт е, определяющий скорость поворота движков потспциОМетров, устанавливается оператором.
Из «ап|5 яжений на выходах согласующих усилителей составляются определенные комбипации, поступающие на входы интеграторов
4,9, 25-27.
Характер комбинаций нанряжений определяется, во-первых, тем, чтобы из величии, полученных в результате интегрироватшя, можно было бы составить систему алгебраических уравнений, разрепшемую относительно коэффициентов аппроксимирующей передаточеой функцин, и, во-вторых, чтобы ,при вычислении указанных интегралов не было бы необходимости учитывать начальные и конечные состояния входного и выходного сигналов.
Так, например, при исследовании , аппроксимируемого передаточной функцней
с коэффициентами Ь, do, di и t/2, на выходе интегратор01в определяются числа АО, А, AZ, BI, и BZ:
2tH-l e- -y{l)dt;
5
4 f - -/ j .(l}dti
(t)diо
со
5, f (f -t }(t)d{; о
В. (t)di, о
где x{i) - сигнал на входе объекта;
y(t} - сигнал на выходе объекта, удовлетворяющие уравнению:
Ло4 4- АА + в,ь, + В, (3)
Таким образом, для определения коэффициентов необходимо составить систему «-j-m+l
линейно не зависимых уравнений, где п - степень полинома знаменателя, а т - числителя передаточной функции.
Указанная система может быть получена в результате д+т+1 разовото вычисления иитегралов AI и BI . Причем при случайном воздействии интегралы Л ; н BI могут вычисляться при однОМ н том же коэф|фициенте I, а при однотипном воздействии коэффициент g должен .1 раз изменяться оператором.
Управление процессами пуска интеграторов и следящей системы, остановки и запоминания показаний интеграторов осуществляется блоком управления 10.
П р е д м е т и з о б р е т е н и я
Диализатор переходных процессов, содержащий иитеграторы, потепциометры и нормирующий блок, отличающийся тем, что, с целью упрощения схемы при сохранении точности определения коэф фициентов уравнения объекта нри ступенчатом или произвольном воздействии, в нем установлены преобразователи входного и выходного сигналов и подключепная к выходам двух интеграторов еледящая система, выход которой связан с третьнм интегратором и движком потенц.иометра, подсоединенного через нормирующий блок к выходу объекта, а с движками потенциометров преобразователей, иодключениых ко входу и выходу объекта.
Ч V4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ НАВИГАЦИОННЫХ ДАТЧИКОВ | 1972 |
|
SU342198A1 |
| Устройство для определения параметров динамического звена | 1987 |
|
SU1478194A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ ВРЕМЕНИ ОБЪЕКТА, | 1967 |
|
SU197308A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Следящая система Фомина | 1990 |
|
SU1798763A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2166789C2 |
| Устройство для измерения параметров двухполюсников | 1989 |
|
SU1647421A1 |
| Способ определения параметров передаточных функций линейных динамических объектов | 1977 |
|
SU661511A1 |