Известен копирующий командоаппарат для автоматизации управления сортировкой штучных предметов, перемещаемых преимущественно транспортерОМ, включающий ротор .с продольными пазами и статор, снабженный винтовым пазом на внутренней поверхности и устройствами ввода и вывода моделирующих шариков и съема команды.
Целью .изобретения является новышение надежности работы.
Достигается это тем, что винтовой паз статора выполнен из нескольких участков, каждый из которых снабжен устройствами ввода и вывода моделирующих шариков и съема команды. Участки винтового паза статора выполнены различными по длине. Нижняя образующая винтового паза статора выполнена с наклоном в сторону ротора под углом, не превышающим 60°, а устройство ввода расположено но отношению к статору иод острым углом с наклоном вверх и в сторону движения ротора. К.анал, соединяющий вывод с вводом, выполнен с наклоном в сторону статора. Винтовой паз статора в зонах вводов моделирующих шариков выполнен с углублением, равным диаметру шарика.
Копирующий командоаппарат включает статор 1 с винтовым пазом на внутренней поверхности, внутри которого вращается ротор 2, связанный через редуктор с гладким барабаном сортировочного транспортера. Ротор имеет продольные пазы, расположенные на внешней поверхности. Оси ротора и статора расположены вертикально.
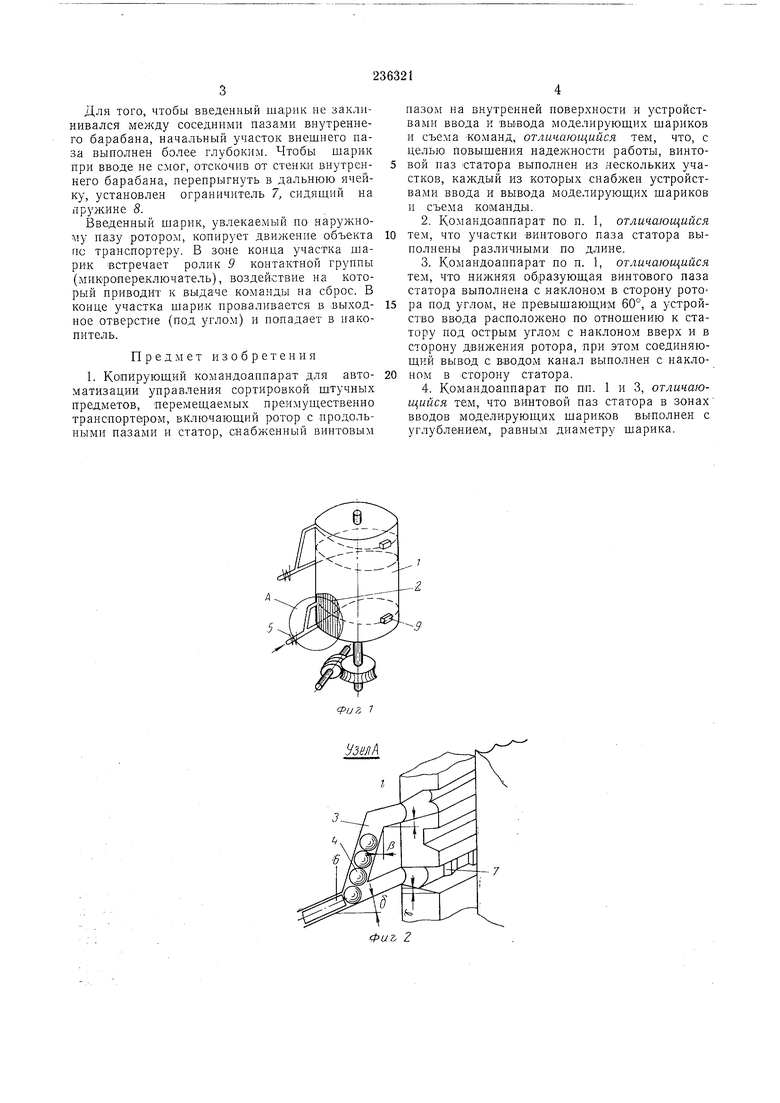
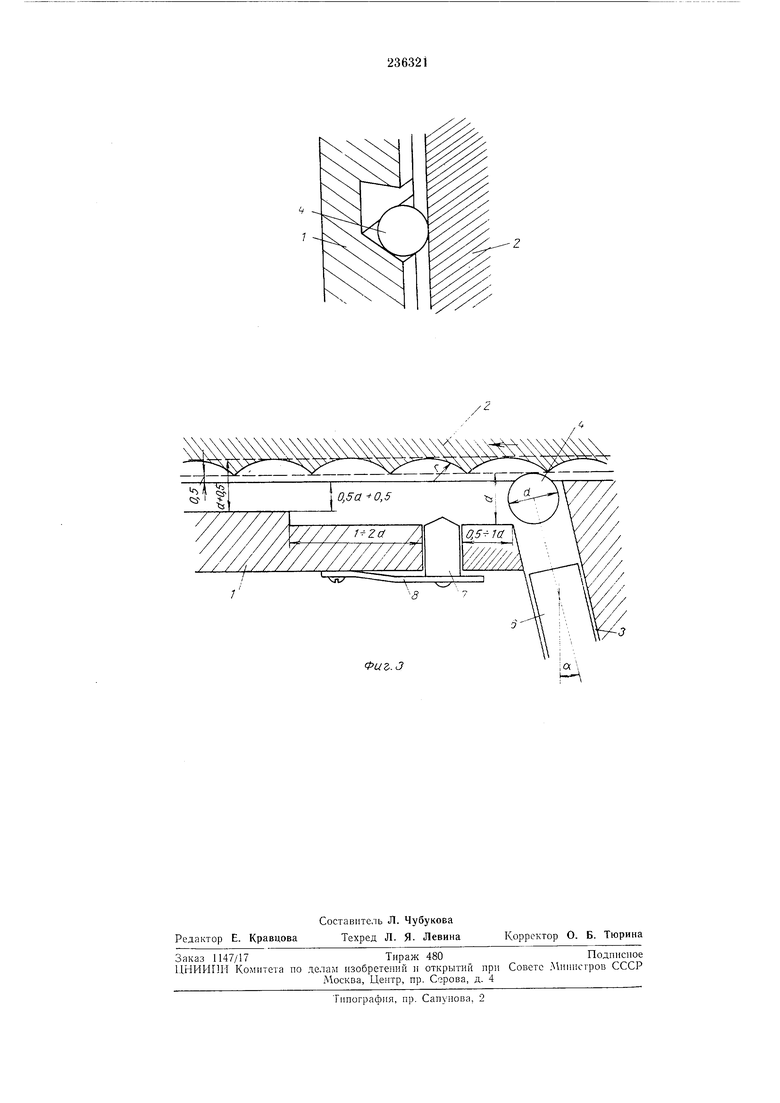
Глубина назов статора л ротора такова, что в месте их перекрещивания может поместиться металлический шарик диа.метром 4 мм. Винтовой паз разделен на участки, число которых равно числу адресов. Длина участков примерно пронорциональна расстоянию на сортировочном транспортере до aiecT сброса сортируемых штучных предметов (бревен). Начало и конец каждого участка соеди1нены отверстиями с накопителями 3, в которых находятся шарики 4. При иажатин адресной кнонкн срабатывает Электр ОМ а гни т 5 и толкателем 6 вводит один шарик iB лаз.
Нижняя образующая наружного паза наклонена под углом Y- Такой же наклон имеет и вводный канал, благодаря чему шарик, доведенный толкателе.м до вводного канала, скатывается до уиора iB стенку внутреннего паза. Чтобы не было самопроизвольного вдавливания шариков в паз, плечн накопителя наклонены под углом р и б.
Для того, чтобы введенный ma,piiK не заклинивался между соседними пазами внутреннего барабана, начальный участок внешнего паза выполнен более глубоким. Чтобы шарик при вводе не смог, отскочив от стенки виутреинего барабана, перепрыгнуть в дальнюю ячейку, установлен ограничитель 7, сидяидий на лружине 8.
Введенный шарик, увлекаемый ио наружнод.у пазу ротором, копирует движение объекта ПС транспортеру. В зоне конца участка шарик встречает ролик 9 контактной группы (микропереключатель), воздействие на который приводит к выдаче команды на сброс. В конце участка шарик проваливается в выходное отверстие (под углом) и попадает в накопитель.
Предмет изобретения
1. Ко пируюш,ий командоанпарат для автоматизации управления сортировкой штучных предметов, перемешаемых преимущественно транспортером, включаюш,ий ротор с продольными пазами и статор, снабженный винтовым
пазом на внутренней поверхности и устройствами ввода и вывода моделируюш.их шариков и съема команд, отличающийся тем, что, с целью повышения надежности работы, винтовой паз статора выполнен из нескольких участков, каждый из которых снабжен устройствами ввода и вывода моделирующих шариков и съема ко1манды.
2.Командоаппарат по п. 1, отличающийся тем, что участки виитового паза статора выиолиеиы различными по длине.
3.Командоаппарат по п. 1, отличающийся тем, что нижняя образующая винтового паза статора выполнена с наклоном в сторону ротора иод углом, не превышающим 60°, а устройство ввода расположено по отношению к статору под острым углом с наклоном вверх и в сторону движения ротора, при этом соединяющий вывод с вводом канал выиолиен с наклоном в сторону статора.
4.Командоаипарат по пп. 1 и 3, отличающийся тем, что винтовой паз статора в зонах вводов моделирующих шариков выполнен с углублением, равным диаметру шарика.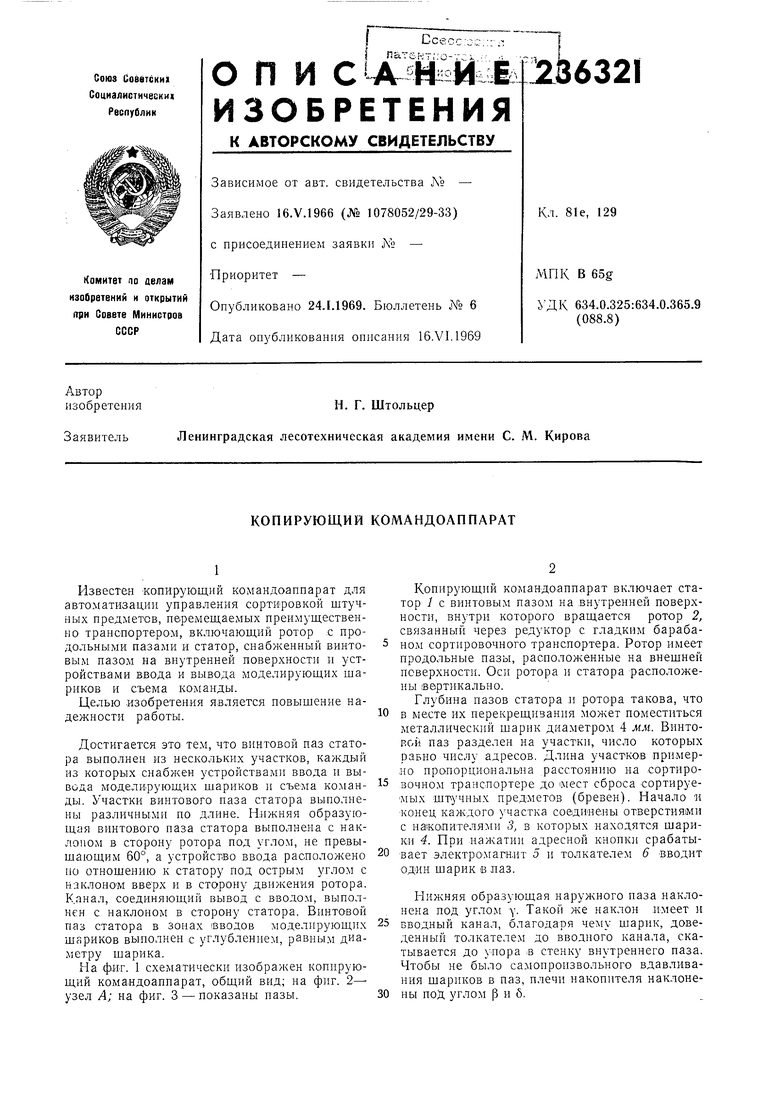
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат для дистанционного управления бревносбрасывателями на продольных транспортерах | 1960 |
|
SU144438A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОРТИРОВКОЙ КРУГЛОГО ЛЕСА | 2023 |
|
RU2795741C1 |
| Машина для сортировки и поискаплОСКиХ пРЕдМЕТОВ | 1978 |
|
SU841693A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ПОЛУПРОВОДНИКОВЫХ ИЗДЕЛИЙ | 1991 |
|
RU2024332C1 |
| МНОГОАДРЕСНОЕ ОДНОКАНАЛЬНОЕ СИНХРОННО-КОПИРУЮЩЕЕ УСТРОЙСТВО | 1965 |
|
SU215293A1 |
| СПОСОБ ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2441830C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ, ИСПЫТАНИЯ И СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХ ПРУЖИН | 1992 |
|
RU2005572C1 |
| Машина для сортировки плоских предметов | 1980 |
|
SU895550A1 |
| Автомат для сортировки на размерные группы цилиндрических деталей | 1980 |
|
SU878360A1 |
| Устройство для автоматической сортировки писем или других предметов по направлениям | 1957 |
|
SU111695A1 |
:/jeJlA
Фuг.J
