Изобретение относится к сортировке объектов, в частности сельскохозяйственной продукции в процессе после уборочной и товарной обработки.
Основными критериями качества сортировки являются точность адресации объекта в зависимости от заданных показателей.
В настоящее время известны способы сортировки сельскохозяйственной продукции в процессе ее послеуборочной и товарной обработки, устройства для их осуществления. При этом объекты при помощи узла поштучной подачи подают в зону контроля для определения текущего значения показателя разделения и сравнение его с заданным. При этом контроль объектов может осуществляться либо в свободном падении, либо непосредственно на узле подачи.
В случае исследования объектов в свободном падении имеет место ограничения по количеству фракций при сортировке, осуществляемом одним устройством. Это ограничение связано с разбросом траекторий перемещения объектов в зоне размещения исполнительных механизмов, устанавливаемых вдоль траектории движения объекта, что приводит к увеличению размеров исполнительных механизмов, и повышению повреждаемости исследуемых объектов, вследствие увеличения их скорости (а.с. N 4241835).
В случае исследования объектов непосредственно на узле подачи необходима стабилизация его положения в зоне контроля на узле подачи, а также при их перемещении к исполнительному механизму. Это обеспечивается тем, что узел подачи снабжен ячейками для размещения исследуемых объектов, адресация которых осуществляется воздействием исполнительных механизмов на ячейку. В связи с этим в каждой ячейке может находиться только один объект. При этом колебания в размере сортируемых объектов могут в соответствующей мере изменять производительность при сортировке различных видов продукции (а.с. N 4735823).
Известен способ сортировки объектов, подаваемых потоком в зону контроля и устройство для его реализации, предусматривающее исследование объектов с последующей адресацией каждого объекта несколькими исполнительными механизмами, каждому из которых соответствует собственный анализирующий блок. (Старовойтов В.И., Башилов А.М., Андержанов А.Л. Автоматизация контроля качества картофеля, овощей и плодов, Издательство ВО "Агропромиздат", М, 1987, с. 135-139). Это позволяет исключить использование ячеистого узла подачи.
Известен способ сортировки объектов, при котором осуществляют поштучную однорядную подачу объектов в зону контроля и последовательное перемещение вдоль мест адресации. При этом удаление объектов по результатам сигнала исследования осуществляют при помощи поворотных механизмов, вводимых в зону перемещения объекта поперек направлению их перемещения. Точность адресации в данном случае зависит от соответствия между значением расстояния между объектами, скоростью их перемещения и временем взаимодействия исполнительных механизмов с объектами (а.с. N 4549272).
Известен также способ сортировки объектов, перемещаемых транспортером с опорными элементами, предусматривающий поштучную, по крайней мере однорядную подачу объектов в зону контроля, перемещение их к местам адресации, измерение текущего значения показателя сортировки, сравнение его с заданным с последующим распределением объектов по адресатам по результатам сравнения.
При этом адресацию объектов осуществляют без учета их типоразмеров. Для реализации данного способа известна установка для сортировки объектов, содержащая узел подачи, транспортер с опорными элементами, устройство для отвода объектов по адресатам, систему контроля с устройством для измерения заданных значений показателя сортировки, связанную с исполнительным механизмом. При этом каждый опорный элемент, содержит определенное количество поворотных лепестков, что обеспечивает плавный сброс объектов в месте адресации, но сортировка осуществляется без учета типоразмера объектов, что вызывает изменение производительности установки за счет неполноты использования коэффициента заполнения узла подачи.
В основу изобретения положена задача разработать способ для распределения объектов по адресатам при их сортировке путем учета типоразмеров объекта и качественных показателей сортности и устройство для его осуществления.
Задача решается тем, что предлагается способ для распределения объектов преимущественно корнеклубнеплодов по адресатам при их сортировке. Объекты перемещают транспортером с опорными элементами, при этом осуществляют поштучную, по меньшей мере однорядную подачу объектов в зону контроля, перемещение их к местам адресации, измерение текущего значения показателя сортировки, сравнение его с заданным с последующим распределением объектов по адресам по результатам сравнения. Согласно изобретению определяют минимально необходимое число опорных элементов участка транспортера, обеспечивающее возможность выведения объекта при удалении опорных элементов этого участка в месте адресации, установленном по результатам сравнения заданного и измеренного текущего значений показателя сортировки. При этом обеспечивается независимое друг от друга выведение объектов в месте адресации при различном коэффициенте заполнения транспортера.
Целесообразно, чтобы определение минимально необходимого числа опорных элементов участка транспортера устанавливалось по числу элементов, на которые ортогонально проецируется исследуемый объект, причем число их должно быть не менее трех. Это обеспечивает соответствие между расположением опорных элементов на транспортере и минимальным размером исследуемого объекта.
Предлагаемый способ осуществляется с помощью установки для сортировки объектов, содержащей узел однослойной поштучной подачи объектов, транспортер с опорными элементами, устройство для отвода объектов по адресатам систем автоматического контроля с устройством для измерения текущих значений показателей сортировки и исполнительными механизмами, в которой в соответствии с изобретением каждый опорный элемент установлен на транспортере с возможностью независимого поворота относительно оси, параллельной направлению перемещения, а система автоматического контроля дополнительно снабжена блоком определения количества опорных элементов, на которые ортогонально проецируется исследуемый объект и связанным с ним узлом определения перемещения опорных элементов, при этом устройство для измерения значения показателей сортировки соединено с блоком определения количества опорных элементов.
Целесообразно, чтобы в предлагаемой установке каждый опорный элемент транспортера состоял из опорной части и хвостовика, установленного на транспортере консольно, посредством кронштейна с возможностью поворота, исполнительный механизм был выполнен в виде электромагнита, сердечник которого представлял бы собой фиксатор, служащий для удержания хвостовика опорного элемента в первоначальном положении. Такое выполнение позволяет обеспечивать вывод опорного элемента в месте адресации под воздействием электромагнитного поля, что снижает затраты энергии, связанные с механическим трением.
Целесообразно также чтобы в установке каждый поворотный элемент транспортера был установлен таким образом, чтобы его поверхность была расположена в горизонтальной плоскости. Это обеспечивает возможность перемещения объектов к местам адресации, имеющих устойчивое положение на горизонтальной плоскости.
Целесообразно снабдить установку по меньшей мере одним дополнительным транспортером с опорными элементами, расположенным параллельно основному транспортеру, при этом опорные элементы должны быть установлены наклонно, навстречу друг другу, с образованием V-образного канала для размещения в нем объекта, причем по меньшей мере один транспортер должен быть оснащен аналогично выполненными элементами, расположенными в противоположных сторонах относительно продольной оси транспортера. При этом обеспечивается ориентация объекта по отношению устройства для измерения текущих показателей сортировки.
Целесообразно снабдить каждую опорную часть опорных элементов втулкой, установленной с возможностью свободного вращения относительно оси, причем втулки по крайней мере двух соседних опорных элементов должны иметь противоположно направленные навивки. При этом обеспечивается возможность дифференциального контроля исследуемого объекта за счет его вращения втулками без изменения его положения относительно транспортера в направлении перемещения последнего.
Целесообразно, чтобы каждый фиксатор состоял из корпуса с установленными внутри него вдоль продольной оси подпружиненными защелками, связанными со стопорящими планками и смещенными одна относительно другой в направлении перемещения транспортера. При этом обеспечивается возможность управления положением опорных элементов одновременно в двух смежных каналах.
Целесообразно, чтобы в установке транспортер с опорными элементами был выполнен горизонтально замкнутым роторного типа и был снабжен концентрично расположенным внутри него ограничителем, выполненным с возможностью синхронного вращения с транспортером и образующим с поворотными элементами транспортера V-образный канал для размещения в нем объектов. Это позволяет использовать установку в технологических схемах с радиальным отводом сортируемых объектов.
Целесообразно, чтобы ограничитель был установлен с возможностью свободного вращения. Это обеспечивает упрощение привода установки.
Целесообразно, чтобы транспортер горизонтально замкнутый роторного типа был снабжен профилем для обеспечения возможности равномерного крепления опорных элементов к транспортеру по его периметру.
Это обеспечивает упрощение технологии изготовления установки при ориентированном креплении поворотных элементов на транспортере.
Неожиданный эффект, заключающийся в независимой от промежутков между объектами адресации последних, обусловлен использованием транспортеров с опорными элементами, взаимное расположение которых выбирают из условия минимального типоразмера объектов, каждый из которых в зоне контроля проецируется не менее чем на тpи опорных элемента.
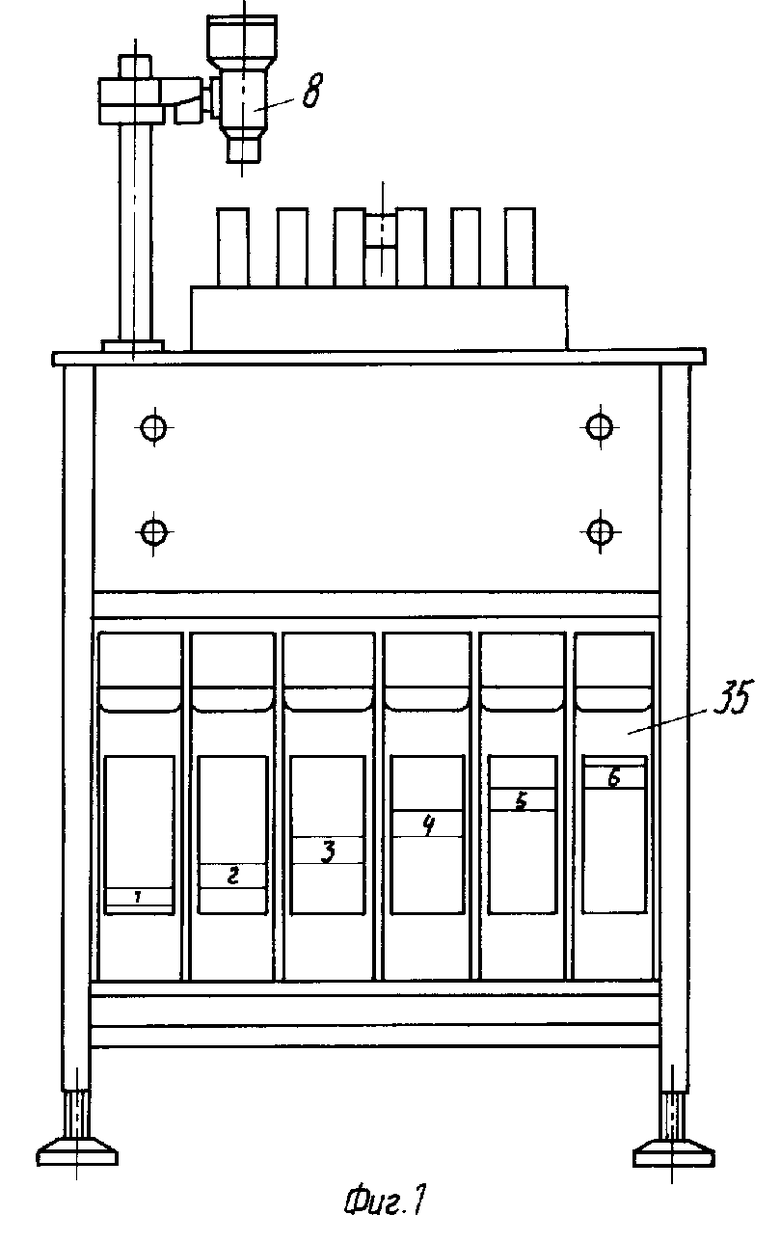
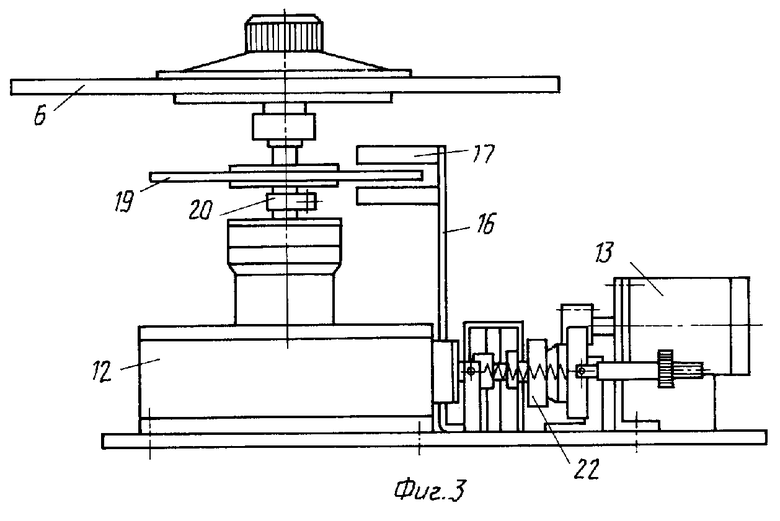
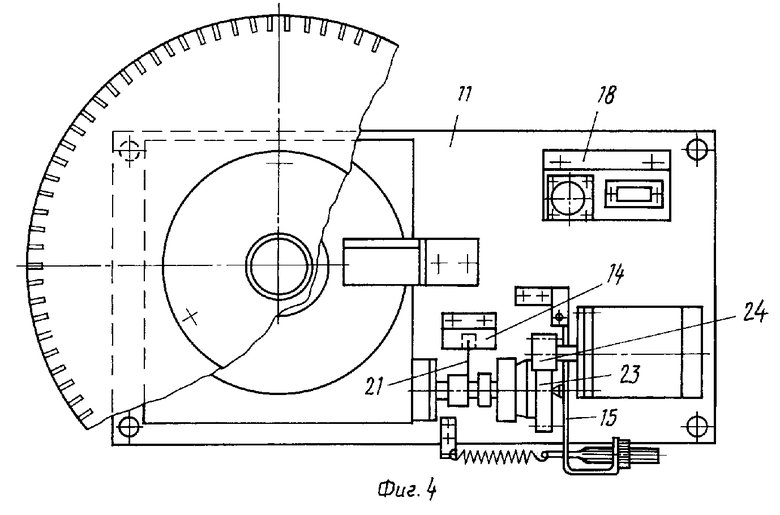
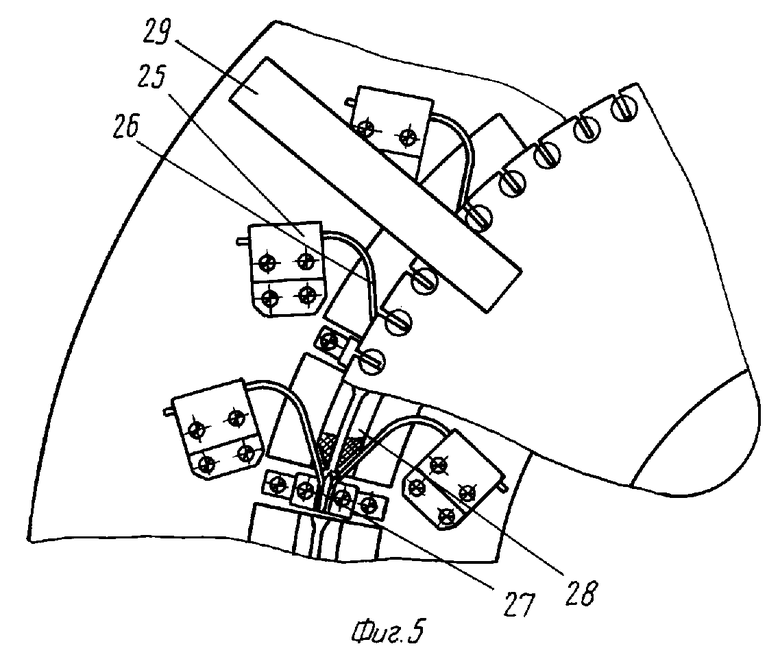
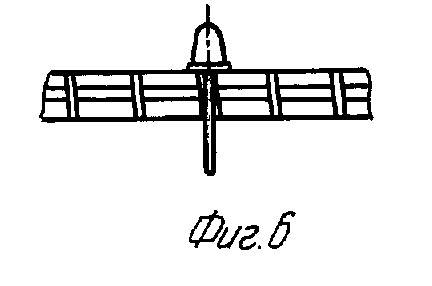
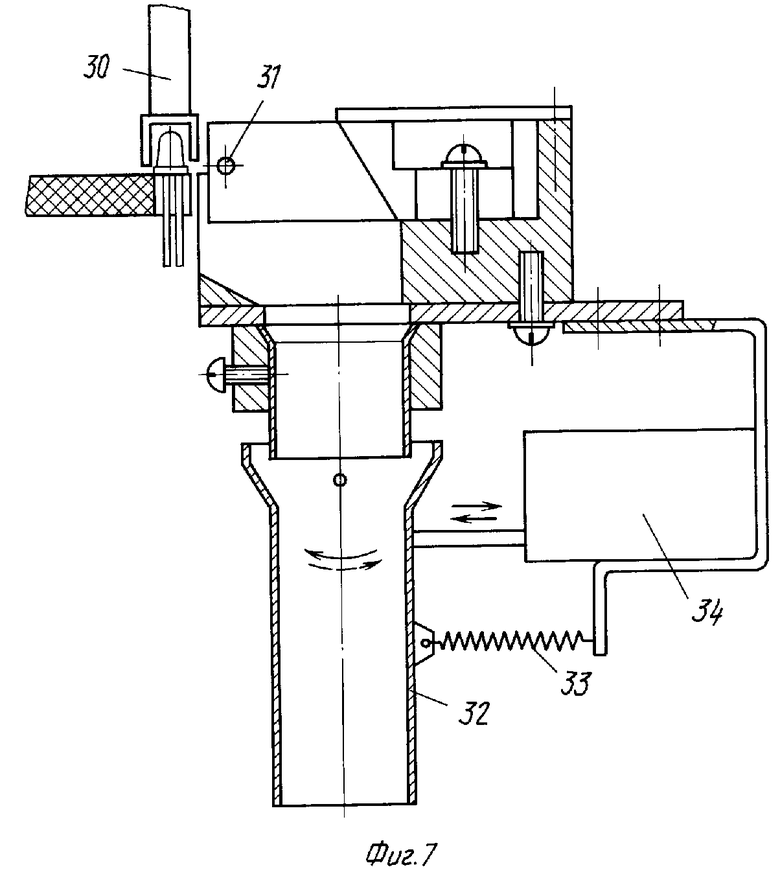
На фиг. 1 схематично изображена установка для сортировки объектов в соответствии с изобретением; на фиг.2 - участок транспортера продольного типа с опорными элементами в соответствии с изобретением; на фиг.3 - участок транспортера с опорными элементами для горизонтально замкнутого транспортера роторного типа; на фиг. 4 - вариант выполнения установки с наклонно установленными опорными элементами, образующими V-образный канал; на фиг.5 - участок транспортера с наклонно установленными опорными элементами, образующими V-образный канал; на фиг.6 - вариант выполнения установки с горизонтально замкнутым транспортером роторного типа; на фиг.7 - участок отвода объектов транспортера роторного типа; на фиг.8 - участок транспортера с наклонно расположенными поворотными элементами транспортера роторного типа; на фиг.9 - участок транспортера роторного типа для дифференциального исследования объектов; на фиг.10 - конструктивное выполнение фиксатора в соответствии с фиг.5; на фиг.11 - выполнение плавающей опоры транспортера роторного типа; на фиг. 12 - блок-схема установки; на фиг.13 - алгоритм работы установки.
Установка для сортировки объектов (фиг.1) содержит узел 1 однослойной поштучной подачи объектов 2, транспортер 3 с опорными элементами 4, устройство 5 для отвода объектов по адресатам, приспособление 6 для возврата опорных элементов в исходное положение, систему 7 автоматического контроля, с устройством 8 для измерения текущих значений показателя сортировки, связанную с исполнительными механизмами 9, блоком 10 определения количества опорных элементов, на которые ортогонально проецируется объект, и связанный с ним узел 11 определения перемещения опорных элементов.
Участок транспортера, на который ортогонально проецируется объект, включает по меньшей мере два консольно укрепленных на транспортере опорных элемента, образующих участок 26 поверхности транспортера (фиг.1,2,3).
Каждый опорный элемент состоит из опорной части 12 и хвостовика 13, укрепленного консольно на транспортере посредством кронштейнов 14, при этом на транспортере установлен фиксатор 15 с возможностью взаимодействия с хвостовиком 13 опорного элемента (фиг.5, 8). Кроме того, установка снабжена по меньшей мере одним дополнительным транспортером 16 (фиг.4, 5) с опорными элементами, установленным параллельно основному транспортеру, при этом опорные элементы установлены наклонно друг другу с образованием V-образного канала 17 для размещения в нем объектов, причем по меньшей мере один транспортер снабжен аналогично выполненными опорными элементами, расположенными в противоположных сторонах относительно продольной оси транспортера.
Для обеспечения дифференциального контроля объема объекта (фиг.9) каждую опорную часть опорных элементов выполняют в виде втулок 18, установленных вдоль продольной оси, при этом по меньшей мере две из них имеют противоположно направленные винтовые навивки 19 и 20, выполненные с возможностью вращения в противоположных направлениях.
Каждая втулка в верхней части вне зоны размещения исследуемого объекта снабжена роликом 27. При этом ролики втулок с противоположными навивками смещены по высоте относительно продольной оси опорной части поворотных элементов для обеспечения взаимодействия с соответствующими копирами 28, 29, установленными в зоне контроля по разные стороны втулок в направлении их перемещения.
Каждый фиксатор 15 (фиг.10) состоит из направляющей поверхности 21 с установленными в нее вдоль продольной оси подпружиненными посредством пружин 30 защелками 22, связанными со стопорящими планками 23 и смещенными относительно друг друга в направлении перемещения транспортера. Такое конструктивное выполнение фиксатора необходимо в случае оснащения установки дополнительным транспортером 16.
В случае выполнения транспортера 3 горизонтально замкнутым роторного типа (фиг. 6,7), его снабжают концентрично расположенным внутри него ограничителем 24, выполненным с возможностью синхронного вращения с транспортером и образующим с опорными элементами носителя V-образный канал для размещения в нем объектов (фиг.1).
Транспортер 3 роторного типа снабжен профилем 25 (фиг.3,8,9) для обеспечения возможности равномерного крепления поворoтных элементов в плоскости транспортера по его периметру.
Транспортер 3 продольного типа представляет собой втулочно-роликовую цепь, ролики которой опираются на направляющую 31 опорной плиты 32, на которую также крепят копир 6 (фиг.5). Устройство 5 для отвода объектов по адресатам (фиг.4) представляет собой транспортер 33, снабженный разделительными перегородками 34, служащими для разделения потоков объектов после их адресации.
В случае выполнения транспортера горизонтально замкнутым роторного типа устройство для отвода объектов по адресатам представляет собой поверхность 35 в виде параболоида, что необходимо для гашения скорости объекта при его выведении в процессе адресации (фиг.6,7). Разделительные перегородки 36 в данном случае необходимы для гашения горизонтальной составляющей скорости объекта.
Для нивелировки поверхности транспортера 3 роторного типа относительно концентрично расположенного внутри него ограничителя 24, по периметру транспортера с наружной стороны с возможностью регулировки по вертикали установлены плавающие опоры, закрепленные в опорной плите 32. Плавающая опора состоит из вилки 37 укрепленной в опорной плите 32, в которой шарнирно установлены кронштейны 38, 39 с установленными на их концах коническими роликами 40, 41 с возможностью вращения и одновременным взаимодействием с боковой поверхностью транспортера 3. При этом положение кронштейна 38 регулируется пружиной 42 и винтом 43, а положение кронштейна 39 регулируется винтом 44. Усилие пружины 42 изменяют регулировочным винтом 45 и шлицевой шайбой 46.
Для приведения в движение транспортера роторного типа служит фрикционный ролик 47, установленный на валу мотор-редуктора 48.
При осуществлении способа сортировки исследуемые объекты, предпочтительно корнеклубнеплоды, подают поштучно, по меньшей мере однорядно в зону контроля, перемещая их дискретной грузонесущей поверхностью. В зоне контроля каждый объект подвергают исследованию системой контроля для установления показателей сортировки. При этом показатели, определяющие критерии разделения объектов, указывают места их адресации. Например, при выборе в качестве показателя сортировки цвета объекта, в зоне контроля размещают оптическую систему контроля для определения спектральных характеристик объекта. Сравнивают полученное значение с заданным значением границ участков спектральной характеристики. Результат сравнения в данном случае несет информацию о месте адресации.
Кроме того, в зоне контроля устанавливают размер исследуемого объекта, находящегося на опорных элементах транспортера для определения минимально необходимого количества опорных элементов участка транспортера, обеспечивающего возможность выведения объекта при удалении этого участка в месте адресации, установленном по результатам сравнения.
Этот участок может быть определен как количество опорных элементов транспортера, на которых ортогонально проецируется исследуемый объект.
Далее опорные элементы транспортера перемещают исследованный объект к месту адресации, где происходит взаимодействие с исполнительным механизмом только тех элементов, которые составляют этот участок. При этом происходит выведение объекта в месте адресации за счет удаления указанных опорных элементов.
В процессе перемещения исследуемого объекта из зоны контроля к местам адресации опорными элементами транспортера положение объекта относительно последних должно находиться в пределах участка, определенного в зоне контроля.
Это обеспечивает возможность независимого выведения последовательно друг за другом объектов в местах их адресации.
Для осуществления способа сортировки предложенная установка работает следующим образом.
Объекты 2, преимущественно, корнеклубнеплоды, предназначенные для сортировки по показателям сортности подают поштучно узлом 1 подачи объектов 2 на транспортер 3, с опорными элементами 4, где объекты, принимая стабильное положение, и поступают в зону контроля. Устройство 8 для измерения текущих значений показателя сортировки системы 7 автоматического контроля устанавливает текущие значения показателя сортировки. При этом определяют присущие объекту и интересующие пользователя признаки, преобразуя последние в электрические сигналы.
Блок-схема установки и алгоритм ее работы представлены на фиг.12, 13.
Блок 10 определения количества опорных элементов состоит из блока 49 обработки сигнала, оперативно запоминающего устройства 50, постоянно запоминающего устройства 51, устройства 52 ввода-вывода, усилителя 53 мощности.
Пуск установки осуществляют вводом режимов работы (блок 54). Если режим "Работа" не введен, то блок 50 обработки сигнала переходит в режим ввода параметров (блок 55). Пользователь посредством устройства 52 ввода-вывода задает алгоритм обработки об интересующих его параметрах исследуемого объекта, поступающей с устройства 8 для измерения текущих значений показателей сортировки, задает критерий разделения объектов, координаты мест адресации, их взаимное расположение и количество. Данные, вводимые пользователем, могут запоминаться по его желанию постоянно запоминающим устройством 51 с присвоением введенному набору данных определенного номера. В дальнейшем пользователь может вызвать любой требуемый ему набор, введя его номер.
Если введен режим "Работа" - блок 56, пользователь вызывает требуемый ему набор (блок 57) устройством ввода-вывода 52.
Далее блок 49 обработки сигналов приступает к обработке информации об исследуемых объектах 2. Сначала блок обработки сигналов присваивает номер опорному элементу 4, находящемуся в зоне контроля номер i = 1 (блок 58), после чего осуществляется ввод информации с узла 8 для измерения текущего значения параметров сортировки в блок 49 обработки сигналов (блок 59). Блок 49 обработки сигнала определяет наличие сигналов с узла 8 для измерения текущих значений параметров сортировки (блок 60). Причем наличие или отсутствие сигнала говорит о нахождении объекта 2 в зоне контроля над опорным элементом. При наличии объекта в зоне контроля блок 49 обработки сигнала фиксирует момент входа объекта в зону контроля (блок 61) и устанавливает счетчик опорных элементов l = 1 (блок 62), на которые ортогонально проецируется исследуемый объект.
В регистр номеров элементов, на которые ортогонально проецируется объект, заносится номер элемента, находящегося в зоне контроля (блок 63).
При текущей обработке сигнала при наличии объекта в зоне контроля операции по блоку 62 не выполняются.
При отсутствии объекта в зоне контроля блок 49 обработки сигнала фиксирует момент выхода объекта из зоны контроля (блок 64).
Блок 10 определения количества опорных элементов вводит информацию с системы 7 контроля о месте адресации исследованного объекта (блок 65).
Место адресации было определено в результате обработки накопленной с узла 8 для измерения текущих показателей сортировки информации.
Номер места адресации вводится в блок 49 обработки сигналов, который заносит его в ячейки памяти оперативного запоминающего устройства с адресами, определяемыми содержимым регистра R1 номеров опорных элементов, на поверхность которых проецируется объект (блоки 66, 67, 68).
Таким образом, в оперативно запоминающем устройстве 50 записывается информация о месте адресации, опорных элементах, на которых ортогонально проецируется исследуемый объект.
Далее блок 49 обработки сигналов вводит информацию с узла 11 определения перемещения опорных элементов (блок 69).
При появлении в зоне контроля очередного опорного элемента ему присваивается следующий номер (блок 70).
Если новый опорный элемент не появился в зоне контроля, то блок 49 обработки сигнала возвращается к вводу информации с узла 8 для измерения текущих значений показателей сортировки.
При появлении нового опорного элемента в зоне контроля и присвоении ему нового номера блок 49 обработки сигнала проверяет соответствие этого номера общему числу опорных элементов на транспортере (блок 71).
Если номер нового опорного элемента превышает общее число опорных элементов на транспортере, то этому элементу присваивается номер i = 1 (блок 72).
Далее блок 49 обработки сигналов считывает ячейки памяти, которые определяют положение исполнительных механизмов в текущий момент времени.
По расстояниям mj, выраженным в количестве опорных элементов, между зоной контроля и исполнительными механизмами 9, определяют адреса считываемых ячеек оперативного запоминающего устройства 50 (блок 73, 74).
Если содержимое ячеек оперативно запоминающего устройства совпадает с номером j исполнительного механизма (блок 75), соответствующего расстоянию mj, то вырабатывается сигнал включения исполнительного механизма (блок 76). В противном случае производится его выключение (блок 77).
Сигналы управления исполнительными механизмами через устройство 52 ввода-вывода, подаются к усилителю 53 мощности.
По окончании опроса ячеек оперативное запоминающее устройство в блоке 78, 79 увеличивает значение счетчика опорных элементов и переходит к вводу сигнала от узла 8 для измерения текущих значений показателей сортировки.
С усилителя 53 мощности сигналы подаются к исполнительным механизмам 9, установленным непосредственно перед местами адресации и выполненным в виде электромагнитов, которые управляют положением фиксаторов 15. При отклонении последних высвобождается хвостовик 13 опорного элемента, что приводит его в состояние устойчивого равновесия. Это и соответствует удалению участка транспортера, при котором происходит вывод объекта непосредственно в месте адресации. Удаление поворотных элементов происходит последовательно по мере их перемещения. Возврат поворотных элементов в первоначальное положение обеспечивается за счет их взаимодействия с копирами 6.
Установка предусматривает различные варианты выполнения транспортера. При этом опорные элементы транспортера могут быть установлены горизонтально или под углом, причем перемещение объектов может осуществляться одним транспортером или двумя. В случае перемещения объектов двумя транспортерами с расположенными под углом опорными элементами, последние образуют V-образный канал для размещения объектов. При увеличении числа каналов для увеличения производительности установки, опорные элементы смежных V-образных каналов могут быть образованы опорными элементами, установленными на одном транспортере в противоположных сторонах относительно продольной оси транспортера. При этом взаимодействующие с ними опорными элементами фиксаторы располагают по направлению движения для обеспечения возможности последовательного взаимодействия с одним исполнительным механизмом.
Изобретение может быть использовано в различных отраслях промышленности при сортировке объектов в зависимости от показателей, задаваемых пользователем, при послеуборочной и товарной обработке сельскохозяйственной продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1991 |
|
RU2024333C1 |
| СПОСОБ ОБОГАЩЕНИЯ МИНЕРАЛИЗОВАННОЙ ГОРНОЙ МАССЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2151643C1 |
| Автоматизированная сортировочная установка для разбраковки сварочных электродов | 1990 |
|
SU1780865A1 |
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ ПО ФОРМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2615625C1 |
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ ПО ИХ ЦВЕТОВЫМ ХАРАКТЕРИСТИКАМ | 2019 |
|
RU2699751C1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ АВТОМАТ | 2006 |
|
RU2317156C2 |
| Устройство для сортировки бревен на воде | 1987 |
|
SU1449496A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ, ИСПЫТАНИЯ И СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХ ПРУЖИН | 1992 |
|
RU2005572C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ЛУЖЕНИЯ ЗАГОТОВОК СТЕКЛОКЕРАМИЧЕСКИХ КОНДЕНСАТОРОВ РАДИОДЕТАЛЕЙ | 1989 |
|
SU1820573A1 |
| Устройство автоматического управления сортировочной машиной | 1986 |
|
SU1391738A1 |
Изобретение относится к контрольно-сортировочной технике и может быть использовано для контроля и сортировки по электрическим и световым параметрам светоизлучающих диодов, а также позволяет упростить конструкцию, повысить надежность контроля. Сущность изобретения: устройство содержит вибробункер 1 с регулятором подачи изделий 2, питатель в виде вибролотка 3 с отсекателем 4 и датчиком заполнения питателя 5, транспортирующий диск 6, контактный механизм 7, фотометр 8, сортировочное устройство 9, пульт управления 10. Привод содержит плиту, на которой расположены червячный редуктор, шаговый двигатель, фотодатчик положения, натяжное устройство, кронштейн с фотодатчиком, кронштейн с разъемами подключения. На выходном валу червячного редуктора закреплен кодовый диск посредством клеммного зажима и транспортирующий диск. На входном валу закреплен флажок и фрикционная муфта с шестерней, входящей в зацепление с шестерней электродвигателя. Натяжное устройство содержит рычаг, пружину, винт с регулировочной гайкой. Контактный механизм содержит несколько контактных позиций, состоящих из контактодержателей, скользящих контактов, опорных ножей. Сортировочное устройство включает в себя сортировочные каналы соответственно количеству групп сортировки. 2 з.п. ф-лы, 7 ил.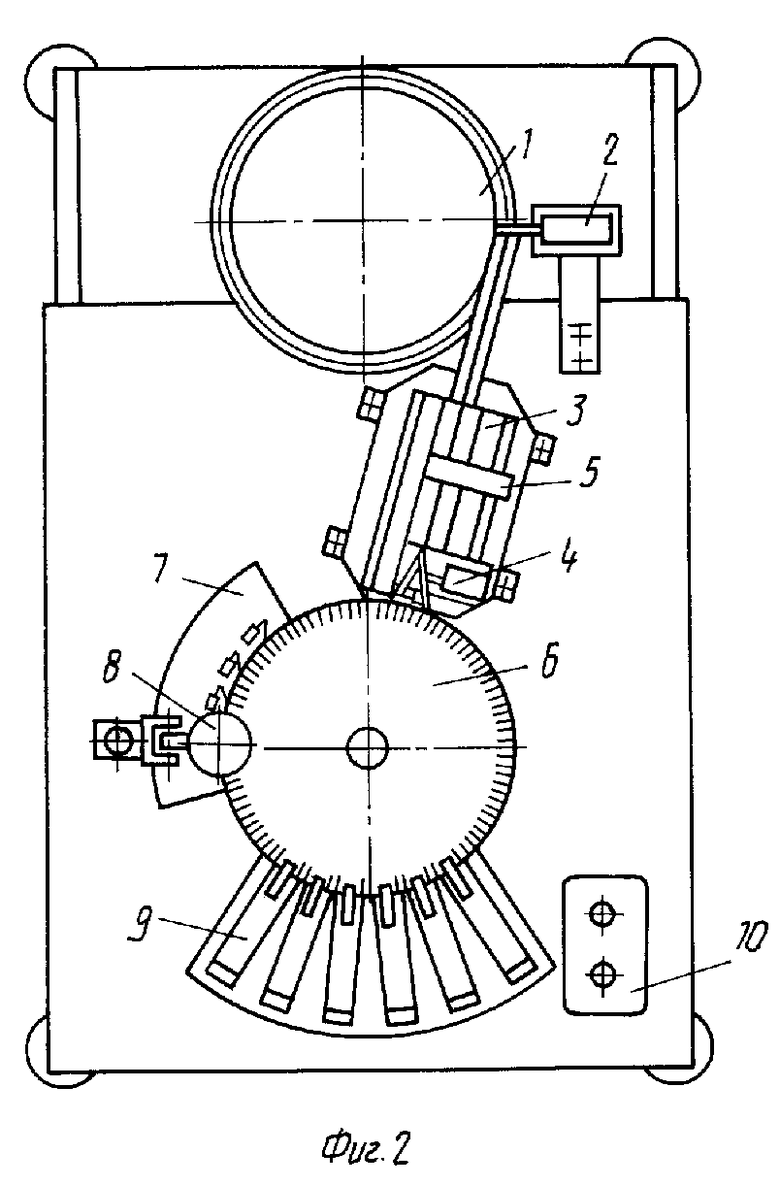
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля и сортировки полупроводниковых изделий | 1980 |
|
SU1028388A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
