ройство с электромагнитными исполнительными механизмами, включающимися по командам измерительной станции, наклонные отводящие лотки и шаговый транспортер с двумя параллельными линейками для передачи деталей из измерительной станции в сортировочное устройство, дополнительно имеет отводящие лотки соответственно числу размерных групп, а каждый исполнительный механизм состоит из двух роликов, расположенных в плоскости симметрии наклонного отводящего лотка между линейками транспортера, при этом один из роликов неподвижен, а другой установлен на якоре электромагнита так, что верхние образующие роликов размещены в плоскости наклонного лотка при верхнем положении якоря электромагнита и в горизонтальной плоскости при его нижнем положении.
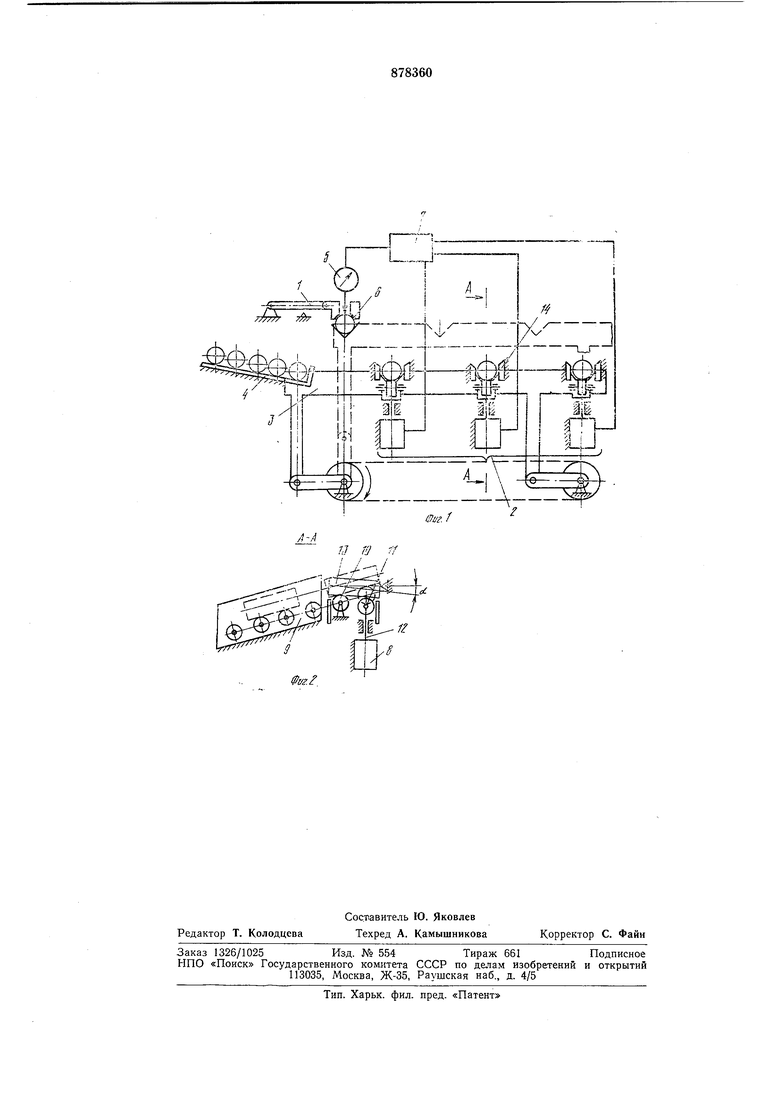
На фиг. 1 изображена конструктивная схема предлагаемого автомата; на фиг. 2 -разрез А-А фиг. I.
Автомат содержит измерительную станцию /, сортировочное устройство 2, транспортер 3 и питатель 4 (привод, командоаппарат, пульт управления, блок управления, входящие в состав любого сортировочного автомата, на схеме не показаны).
Измерительная стапдия образована датчиком 5, элементами 6, по которым контролируемая деталь базируется во время проверки, и электронным преобразователем 7 сигналов датчика.
Сортировочное устройство состоит из электромагнитных исполнительных механизмов 8 и наклонных отводящих лотков .9. Количество исполнительных механизмов и лотков равно числу размерных групп сортировки. Каждый исполнительный механизм расположен в плоскости симметрии лотка между линейками транспортера 3 и состоит из двух роликов 10 и /./.
Ролик // установлен на якоре электромагнита- /5 или кинематически связан с «им. Ось другого ролика неподвижна. Электромагнит толкающего типа. Когда он обесточен, верхние образующие роликов лежат в .горизонтальной плоскости или в плоскости, наклоненной к горизонту под таким углом а, чтобы детали 13 самопроизвольно не скатывались в лоток 9. Для предохраиения деталей от скатывания в сторону служат щечки 14. Ход электромагнита выбирается так, чтобы при его срабатывании верхние образующие роликов размещались в плоскости дна лотка. Лоток может быть выполнен в виде рольганга. В этом случае при срабатывании электромагнита оси роликов лотка и исполнительного механизма должны лежать в одной плоскости.
Автомат работает следующим образом.
Контролируемые детали подаются в питатель 4, из которого транспортер 3 при движении вверх своими линейками поштучно извлекает их и подает в измерительную станцию /.
Деталь контролируется, датчик 5 подает в электронный преобразователь 7 сигнал, соотеетствующий размеру детали. Преобразователь 7 определяет номер размерной группы и запоминает его.
Проконтролированную деталь транспортер 3 выводит -ИЗ измерительной станции /
и передает в сортировочное устройство 2. За цикл работы автомата транспортер переносит деталь на шаг, равный расстоянию между лотками 9, последовательно опуская ее против каждого из лотков на ролики,
установленные горизонтально. Когда деталь находится пад той группой, к которой она принадлежит, преобразователь дает команду на включение электромагнита исполнительного механизма 8, ролик // выдвигается вверх и его верхняя образующая оказывается в одной плоскости с образующей ролика 10 и дном лотка 9. По мере того, как транспортер опускает деталь /5 в исполнительный механизм, она, наезжая на
ролики 11, наклоняется, ложится на ролики 10 и // и скатывается в лоток 9.
Предлагаемый автомат прост по конструкции и имеет широкие технологические возможности. Годовой эффект от внедрения
автомата составляет 7000 рублей.
Формула изобретения Автомат для сортировки на размерные группы цилиндрических деталей, содержащий измерительную станцию, сортировочное устройство с электромагнитными исполнительными механизмами, включающимися по командам измерительной станции, накvTOHHbie отводящие лотки и шаговый транспортер с двумя параллельными линейками для передачи деталей из измерительной станции в сортировочное устройство, отличающийся тем, что, с целью расширения его технологических возможностей, он
имеет дополнительные отводящие лотки соответственно числу размерных групп, а каждый исполнительный механизм состоит из двух роликов, расположенных в плоскости симметрии наклонного отводящего
лотка между линейками транспортера, при этом один из роликов неподвижен, а другой установлен на якоре электромагнита так, что верхние образующие роликов размещены в плоскости наклонного лотка при верхнем положении якоря электромагнита и в горизонтальной плоскости при его нижнем положении.
Источники информации, принятые во внимание при экспертизе:
1. Экеркунста В. «Automatisierung in der langenmesstechnik. Berlin, 1964, p. 219-223. 2. Коченова M. И. и яр. «Контрольно-измерительные автоматы и приборы для автоматических линий, «Мащиностроение, М., 1965, с. 87-92, фиг. 55.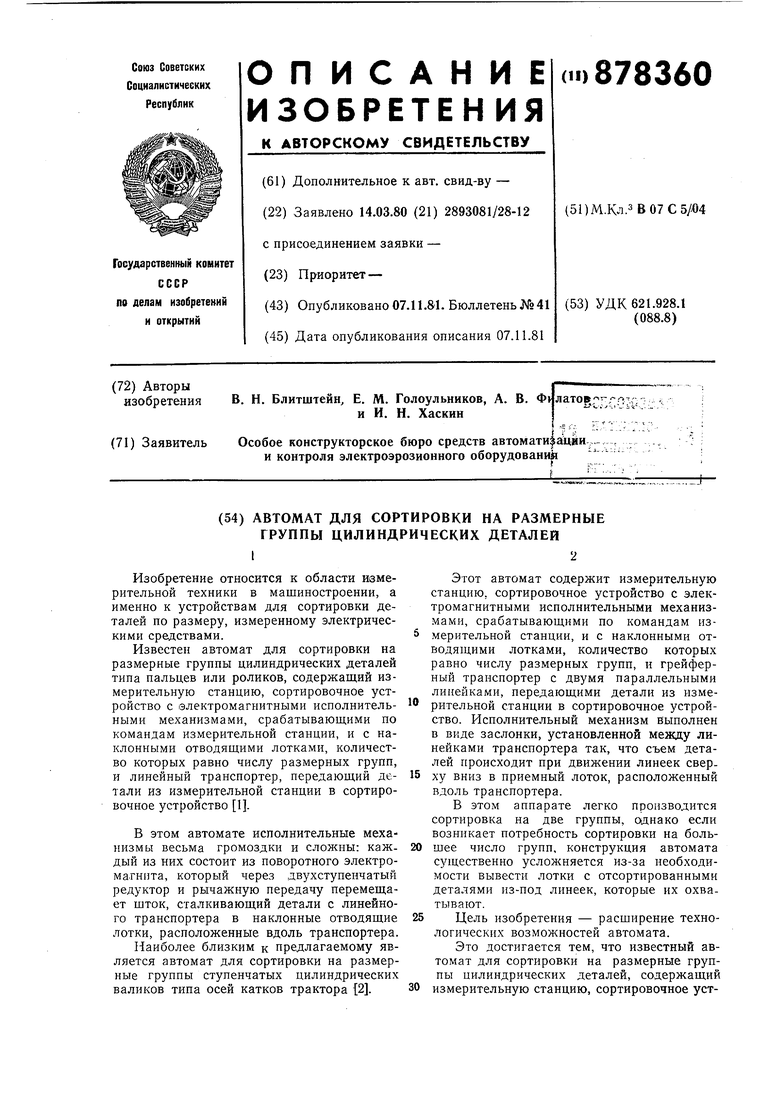
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ АВТОМАТ | 1966 |
|
SU179953A1 |
| Автомат для контроля и сортировки деталей по размерам | 1972 |
|
SU471130A1 |
| Автомат для контроля и сортировки изделий цилиндрической формы | 1985 |
|
SU1359006A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ АВТОМАТ | 2006 |
|
RU2317156C2 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
| Устройство для сортировки деталей | 1989 |
|
SU1703375A1 |
| Автомат для контроля и сортировки цилиндрических деталей по размерам и форме | 1973 |
|
SU446324A1 |
| Многопозиционный автомат для контроля и сортировки цилиндрических деталей | 1980 |
|
SU961796A1 |
| Автомат для сортировки деталей | 1990 |
|
SU1789311A1 |