Известны способы автоматического ноиска экстремума, требующие непрерывного введения во входные цепи объекта оптимизации пробных возмущений.
Предлагаемый способ отличается от известных тем, что он позволяет уменьшить погрешность поддержания экстремального значения управляемой координаты.
Для достижения этого при поиске минимума измеряют отрицательное значение производной сигнала с выхода объекта управления и изменяют полярности сигналов с выходов всех канальных оптимизаторов, добнваясь максимального значения производной выходного сигнала.
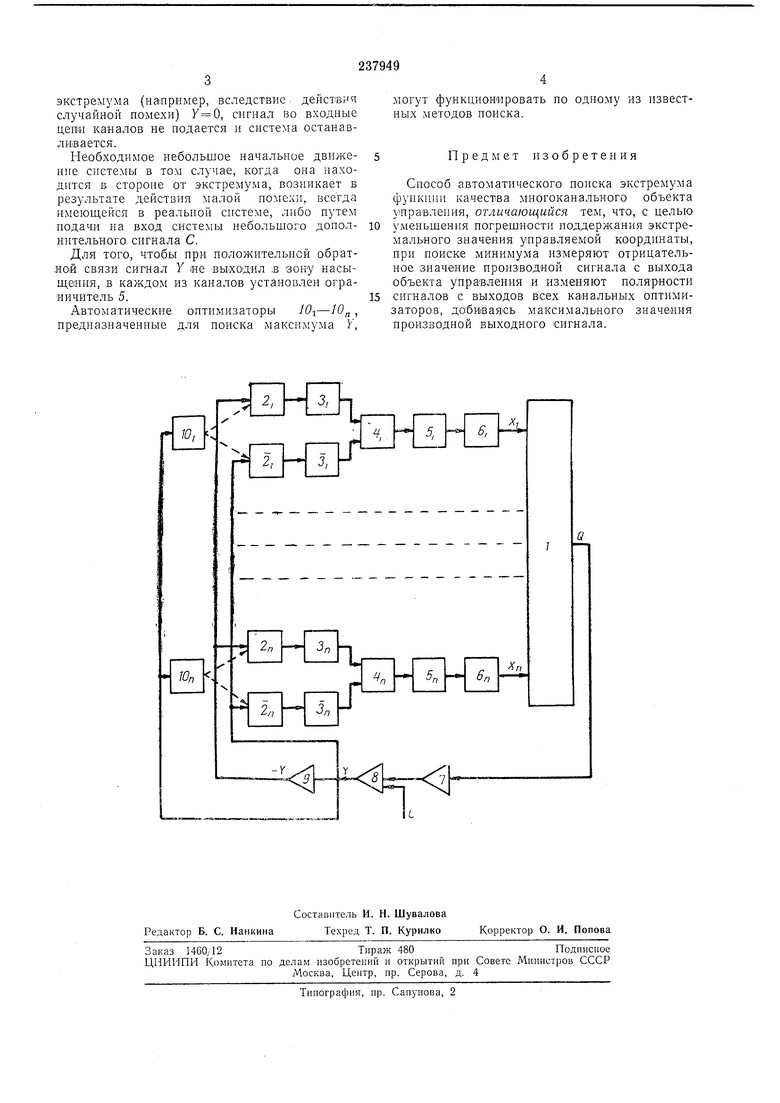
На чертеже изображена структурная схема слстемы автоматического поиска экстремума функции качества многоканального объекта 1 оптимизации - Q(, . . ., п)Входные величины Х, ..., А„ подаются с выходов однотипных каналов, каждый из которых включает ключи 2 и 2, усилители 3 ц 3, сумматор 4, ограничитель 5 и интегратор 6.
Выходная величина Q подается на цепочку звеньев, состоящую из дифференциатора 7, детектирующего устройства 8 н инвертора 9. Выходная величина Y детектирующею устройства подается на входы автоматических оптимизаторов /(10 .
На входы ключей 2 подается У, а на входы ключе 2-выходная величина с инвертора 9 - минус У. Одновременно в каждом из каналов всегда открыт лишь один из ключей 2 или 2.
Вид обратной связи через каждый из параллельно включенных каналов зависит от места включения входной цепи канала (детектор 8 или инвертор 9). а также от знака
dt
Благодаря наличию детектора в системе, предназначенной для поиска минимума, замыкается обратная связь, и У и -У могут
оыть отличными от нуля лишь при двпжении
системы к минимуму, т. е. когда -- 0, а в
dt
системе, предназначенной для поиска максимума, лишь ири - 0. dt
С помощью оптимизатора путем воздействия на ключи 2 п 2 изменяется вид обратной связи через каждый из каналов и макспмизируется У. Макси .муму Y Соответствует максимальное значение общего коэффициента положительной обратной связи, действующей через все параллельно включенные каналы.
экстремума (например, всочедствис действия случайной помехи) , сигнал во входные цепн каналов не подается и система остаиавливается.
Необходимое небольшое начальное движение системы в том случае, когда она находится Б стороне от экстремума, возникает в результате действия малой помехи, всегда имеющейся в реальной системе, либо путем подачи иа вход системы небольшого дополнительного сигнала С.
Для того, чтобы при положительной обратной связи сигнал У ее выходил ;в зону насыщения, в каждом из каналов установлен ограничитель 5.
Автоматические оптимизаторы W-i-/(„ , предиазначеииые для поиска максимума У,
могут функииоиировать ио одному из известных методов иоиска.
Предмет изобретения
Сиособ автоматического поиска экстремума фуикиии качества многоканального объекта уираълеиия, отличающийся тем, что, с целью
уменьшения погрешности поддержания экстремального значения управляемой координаты, при иоиске минимума измеряют отрицательное зиачеиие производной сигнала с выхода объекта управления и изменяют полярности
сигналов с выходов всех канальиых оитимизаторов, до:би1ваясь максимального значения ироизводной выходного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| МНОГОКАНАЛЬНЫЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1970 |
|
SU270856A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU769490A1 |
| Способ поиска экстремума | 1978 |
|
SU744447A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ МНОГОКАНАЛЬНОГО МАЛОИНЕРЦИОННОГО ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU351198A1 |
| Устройство для экстремального регулирования | 1979 |
|
SU860000A1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
