20
11317636
Изобретение относится к управлению лектрическими машинами и может исользоваться при создании однонаправенных приводов силовых механизмов с егулируемым прерывистым перемещением, например приводов подачи кузнеч- но-прессового оборудования.
Цель изобретения - повышение КПД расширение диапазона регулирования величины и частоты перемещения.
Сущность способа заключается в создании шагового изменения электромагнитного поля, определяющего закон перемещения подвижного элемента двигателя. При питании статорных обмоток двухфазного асинхронного двигателя (АД) токами разных частот f, и f- формируется колебательньй режим работы двигателя, причем колебательные электромагнитный момент и скорость изменяются по синусоидальному закону с угловой частотой , пропорциональной разности частот питающих токов fz 2 ir(f, - f2). Двигатель работает в квазиустановившемся режиме мягкого периодического реверса при номи нальных значениях периодически изменяющихся токов. Если теперь на одну из обмоток двигателя подавать питание лишь тогда, когда электромагнитный момент переходит через нуль и прикладывается в одном и том же направлении, подвижный элемент двигателя совершает однонаправленное прерьшистое движение. Поскольку электромагнитный момент изменяется с угловой частотой $2 пропорциональной разности частот питающих токов, ток обмотки получается модулированным по амплитуде периодическим сигналом, со- ответствуюпщм этой разности частот. Аналитически закон движения подвиж- . ного элемента АД в данном случае выражается формулой:
5
п пл
,р ти
. ще jr ты ме че
во дв фа
ро ро ре
25 ха ми
ус бу
JQ фи си бл нь го I
2 со ни ре
40 ни 8, за
об
45 то пи от та
Je(t)
n + .(flt+(,J)-sint J при +
Эе, при n-T+ t t : (п+1)Т,
SCn , Э€„4( начальная и конечная координаты подвижного элемента за один шаг; (.- амплитудное значение координаты, зависящее от параметров мащины, нагрузки источников питания и частоты 52
R (fi-f) -угловая частота шагового перемещения;
0
(f - начальная фаза перемещения;2/- Т - период шага;
-ы длительность шага;
,1,2,3...-порядковый номер шага. Величина шага - определяется амплитудным значением , в частноегр
р ти при t 2, 90 ;
Регулирование величины шага осу- . ществляется плавным изменением часто- r ты одного из питающих токов, т.е. изменением разностной частоты О , причем с уменьшением О. амплитуда J.....,„
mO )СС
возрастает, и наоборот. Направление движения определеяется соотношением фаз питаюш 1х токов.
Плавньм характер изменения электромагнитного поля, а значит, и электромагнитного момента, обеспечивает режим мягкого пуска и остановки АД,
5 характеризуюшдйся минимальными динамическими потерями.
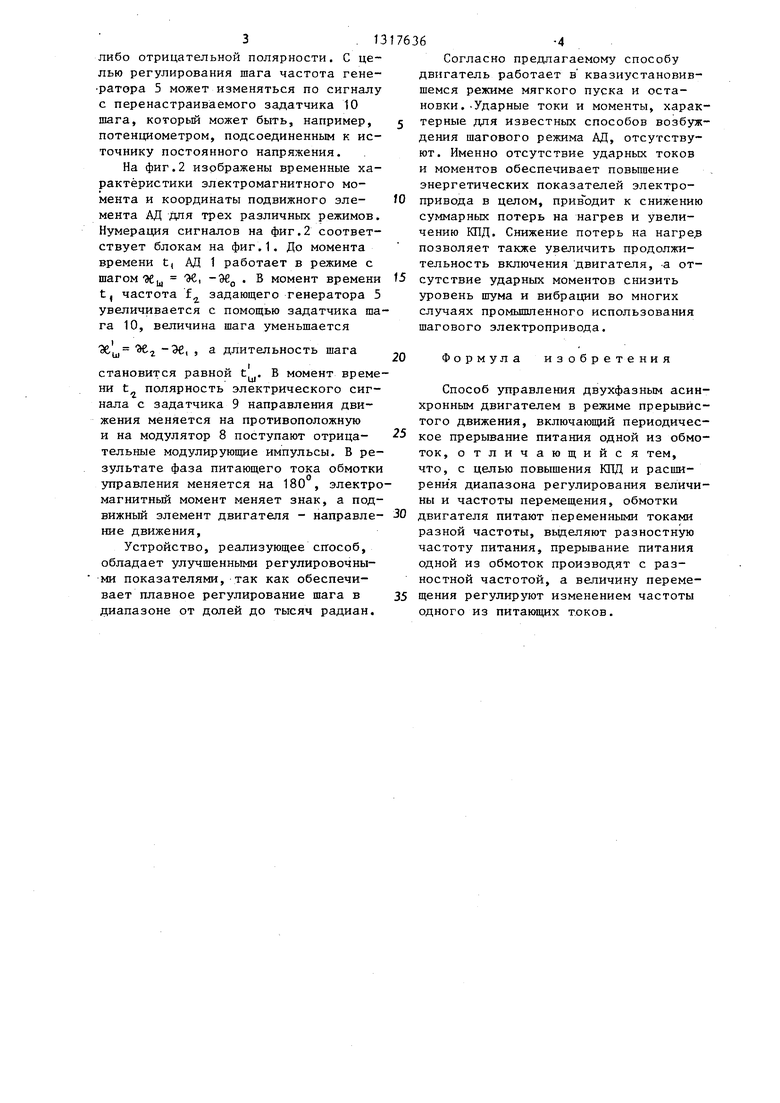
На фиг . 1 .представлена блок-схема устройства, реализующего способ воз- буткр егтя шагового режима АД; на
Q фиг,2 - временные диаграммы выходных сигналов и величин соответствующих блоков устройства (М - электромагнит- ньй момент; Эв - координата подвижного элемента). I
Устройство, реализующее способ, содержит АД 1 с обмоткой 2 возбуждения (ОВ) и обмоткой 3 управления (ОУ), задаюш 1е генераторы 4 и 5 переменного тока, устройство 6 вычита0 ния частот, фильтр 7 знака, модулятор 8, задатчик 9 направления движения и задатчик 10 шага.
Способ осуществляется следующим образом.
5 ОБ 2 двигателя питают током частоты f, , равной номинальной частоте питания двигателя, непосредственно от задающего генератора 4. ОУ 3 питают током частоты f от генератора
0 5 через модулятор 8. Управление модулятором осуществляется сигналом разностной частоты с учетом заданного направления движения. Направление движения определяется полярностью
5 электрического сигнала, поступающего с задатчика 9 на фильтр 7 знака, поскольку последний преобразует сигнал устройства 6 вычитания частот в модулирующие импульсы положительной
3. 13
либо отрицательной полярности. С целью регулирования шага частота гене- ратора 5 может изменяться по сигналу с перенастраиваемого задатчика 10 шага, который может быть, например, потенциометром, подсоединенным к источнику постоянного напряжения.
На фиг.2 изображены временные характеристики электромагнитного момента и координаты подвижного элемента АД Для трех различных режимов. Нумерация сигналов на фиг.2 соответствует блокам на фиг.1. До момента времени t, АД 1 работает в режиме с шагом ЭСц, 36, . В момент времени t, частота f задающего генератора 5 увеличивается с помощью задатчика шага 10, величина шага уменьшается
36, Эб 1 J 3 длительность шага
становится равной t. В момент времени t полярность электрического сигнала с задатчика 9 направления движения меняется на противоположную и на модулятор 8 поступают отрицательные модулирующие импульсы. В результате фаза питающего тока обмотки управления меняется на 180 , электромагнитный момент меняет знак, а подвижный элемент двигателя - направление движения,
Устройство, реализующее сггособ, обладает улучшенными регулировочными показателями, так как обеспечивает плавное регулирование шага в диапазоне от долей до тысяч радиан.
6-4
Согласно предлагаемому способу двигатель работает в квазиустановив- шемся режиме мягкого пуска и остановки. -Ударные токи и моменты, характерные для известных способов возбуждения шагового режима АД, отсутствуют. Именно отсутствие ударных токов и моментов обеспечивает повьппение энергетических показателей электропривода в целом, привЪдит к снижению суммарных потерь на нагрев и увеличению КПД. Снижение потерь на HarpejB позволяет также увеличить продолжительность включения двигателя, -а отсутствие ударных моментов снизить уровень шума и вибрации во многих случаях промышленного использования шагового электропривода.
20
Формула изобретения
Способ управления двухфазным асинхронным двигателем в режиме прерывистого движения, включаюш 1й периодическое прерывание питания одной из обмоток, отличающийся тем, что, с целью повышения КПД и расши- рени я диапазона регулирования величины и частоты перемещения, обмотки
двигателя питают переменными токами разной частоты, вьделяют разностную частоту питания, прерывание питания одной из обмоток производят с разностной частотой, а величину перемещения регулируют изменением частоты одного из питающих токов.
Редактор Л.Пчолинская
фигг
Составитель В.Алфимов
Техред М.Ходанич . Корректор А.Ильин
Заказ 2433/54Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная., 4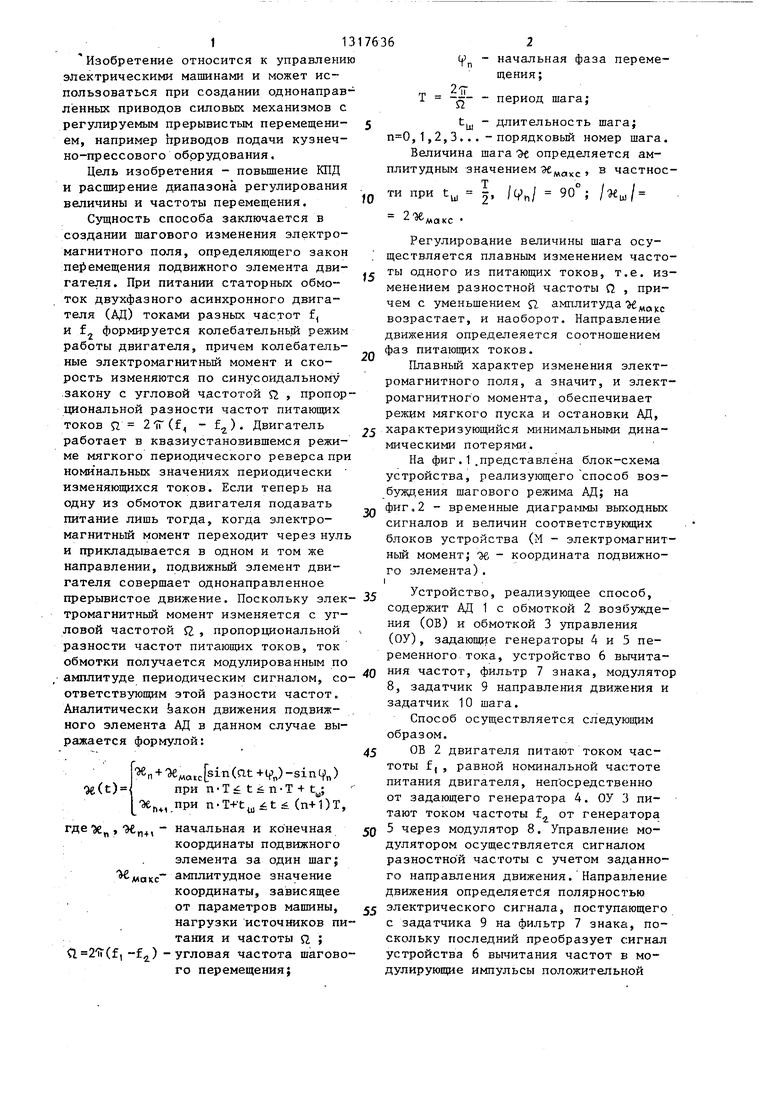
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО С РЕГУЛИРУЕМЫМ КОЭФФИЦИЕНТОМ ПЕРЕДАЧИ СКОРОСТИ ВРАЩЕНИЯ | 1970 |
|
SU265264A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2629946C1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Способ частотного управления асинхронным электродвигателем | 1984 |
|
SU1188840A1 |
| РУССКИЙ АВТОМАТИЗИРОВАННЫЙ ПАРАМЕТРИЧЕСКИЙ ЭЛЕКТРОПРИВОД ЯЛОВЕГИ | 2004 |
|
RU2262791C1 |
| Способ регулирования сварочной дуги в процессе автоматизированной сварки или наплавки с использованием сварочного манипулятора | 2021 |
|
RU2760143C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТОЙ ОБМОТКОЙ РОТОРА | 1997 |
|
RU2153755C2 |
| Следящая система | 1982 |
|
SU1081622A1 |
Изобретение относится к электротехнике, касается управления электрическими машинами и м.б. использовано при создании однонаправленньк приводов силовых механизмов с регулируемым прерывистым перемещением. Цель СОСТОИТ в повышении КПД и расширении диапазона регулирования величины и частоты перемещения. Обмотку возбуждения двигателя питают током частоты f , равной номинальной частоте питания двигателя от задающего генератора 4. Обмотку управления питают током частоты f от генератора 5 через модулятор 8, управление которым осуществляют сигналом разностной частоты с учетом заданного направления движения. Направление движения определяется полярностью эл. сигнала, поступающего с задатчика 9 на фильтр знака 7. Для регулирования шага частота генератора 5 может изменяться по сигналу с перенастраиваемого задатчика шага 10. Такое управление обеспечивает работу двигателя в ква- зиустановившемся режиме мягкого пуска и остановки, ударные токи и мо-. менты отсутствуют, что обеспечивает улучшение энергетических показателей двигателя в целом. 2 ил. SS (Л КГ Л iX S I j со О5 со о -€
| Устройство для управления асинхронным электроприводом | 1978 |
|
SU748765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Петров И.И., Мейстель A.M | |||
| Специальные режимы работы асинхронного электропривода.- М.: Энергия, 1968, с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
