Известны установки для проведения мореходных испытаний модели судна в опытном бассейне, содержащие несущую ферму с продольными направляющими, перемещающуюся вдоль них каретку, вертикальный возвратнопоступательно перемещающийся пилон, соединяемый с моделью, силоизмеритель и устройство постоянной тяги, включающее в себя цилиндрическую винтовую пружину кручения.
Описываемая установка отличается от известных тем, что устройство постоянной тяги выполнено с моментным электродвигателем постоянного тока, выходной вал которого соединен тросо-блочной системой с кареткой.
Такая конструкция установки обеспечивает дистанционное управление и расширение диапазона силы подтягивания модели судна.
Для повышения точности измерения буксировочного сопротивления за счет исключения влияния сил трения в подвижных узлах установки на показания силоизмерителя его целесообразно устанавливать на ферме-качалке, встроенной в каретку и кинематически взаимодействующей с пилоном.
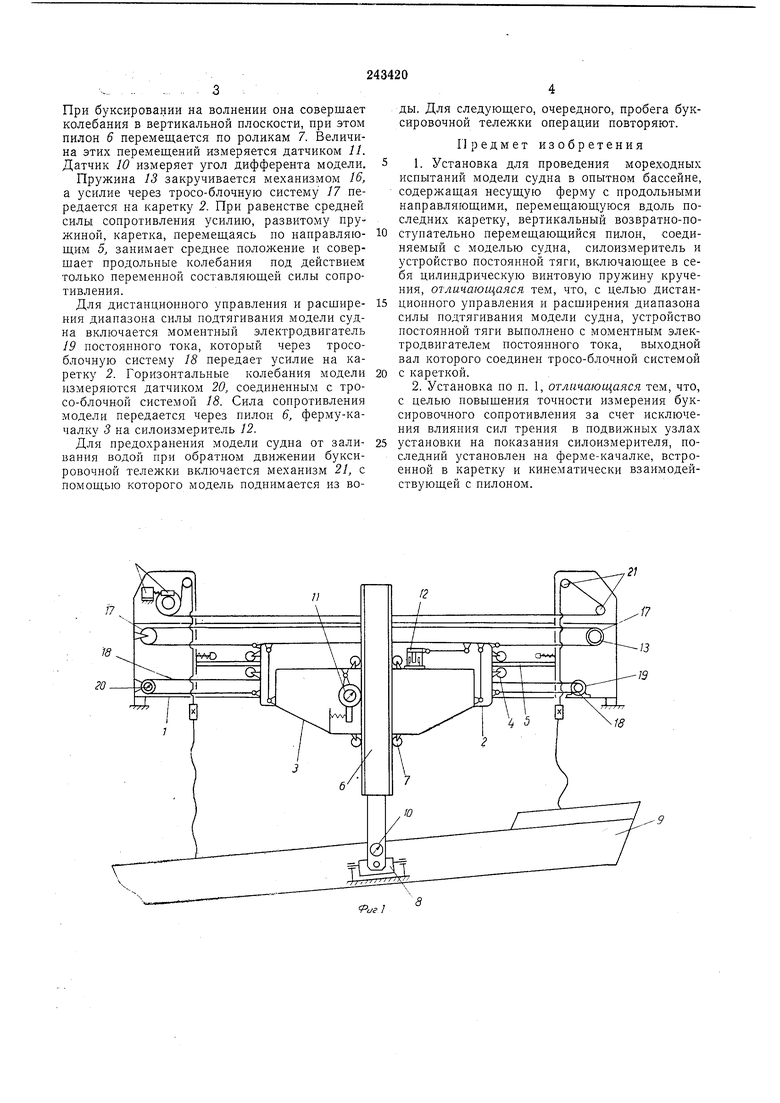
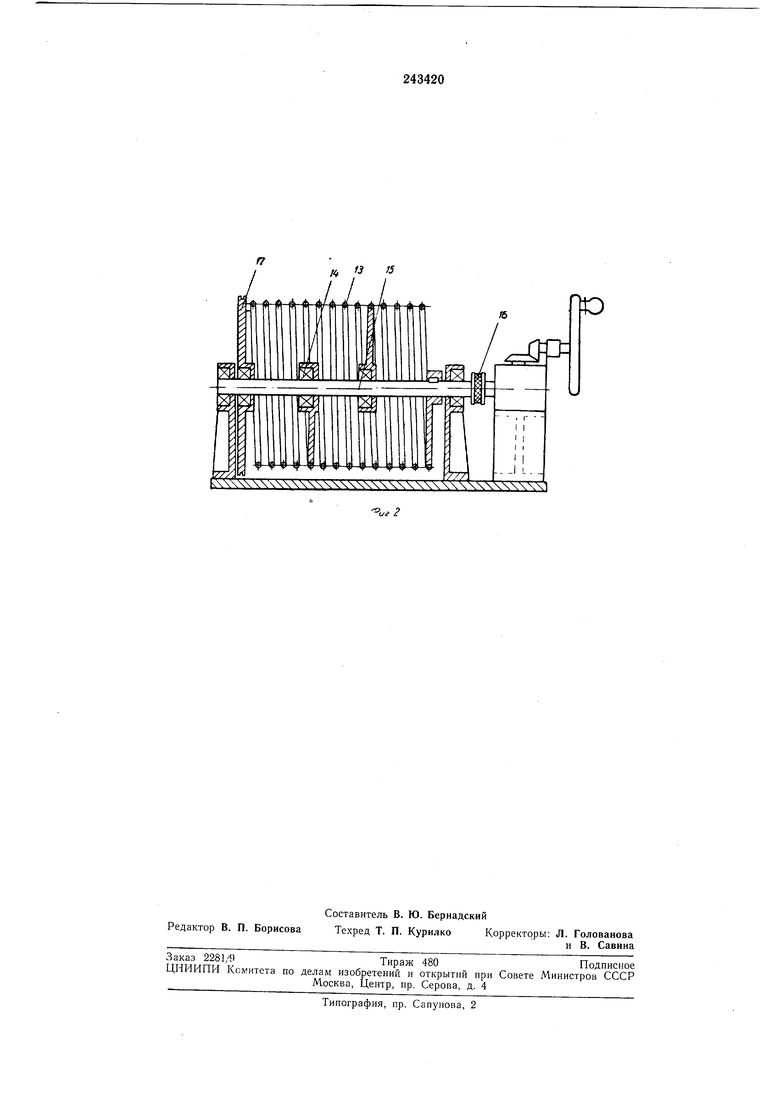
На фиг. 1 схематически изображена описываемая установка; на фиг. 2 - цилиндрическая винтовая пружина кручения.
внутри которой шарнирно смонтирована ферма-качалка 3. Каретка выполнена с роликами 4, перекатывающимися вдоль фермы 1 по ее продольным направляющим 5.
Вертикальный пилон 6, встроенный в фермукачалку, может перемещаться возвратно-поступательно относительно роликов 7, закрепленных на ферме-качалке 3, и несет на себе бащмак 8, к которому крепится модель 9 судна. В нижней части пилон снабжен датчиком
10угла дифферента модели.
На ферме-качалке 3 смонтированы датчик
11вертикальных перемещений и силоизмеритель 12., закрепленный своей подвижной частью на каретке 2.
Цилиндрическая винтовая пружина кручения 13, насаженная с помощью подшипников 14 на ось 15 и снабженная механизмом 16 для регулирования жесткости, кинематически соединена тросо-блочной системой 17 с кареткой 2. В свою очередь, каретка тросо-блочной системой 18 кинематически соединена с выходным валом моментного электродвигателя 19 постоянного тока и датчиком 20 горизонтальных перемещений.
При буксировании на волнении она совершает колебания в вертикальной плоскости, при этом пилон 6 перемещается по роликам 7. Величина этих перемещений измеряется датчиком 11. Датчик W измеряет угол дифферента модели.
Пружина 13 закручивается механизмом 16, а усилие через тросо-блочную систему 17 передается на каретку 2. При равенстве средней силы сопротивления усилию, развитому пружиной, каретка, перемещаясь по направляющим 5j занимает среднее положение и совершает продольные колебания под действием только переменной составляющей силы сопротивления.
Для дистанционного управления и расширения диапазона силы подтягивания модели судна включается моментный электродвигатель 19 постоянного тока, который через трособлочную систему 18 передает усилие на каретку 2. Горизонтальные колебания модели измеряются датчиком 20, соединенным с тросо-блочной системой 18. Сила сопротивления модели передается через пилон 6, ферму-качалку 3 на силоизмеритель 12.
Для предохранения модели судна от заливания водой при обратном движении буксировочной тележки включается механизм 21, с помощью которого модель поднимается из воды. Для следующего, очередного, пробега буксировочной тележки операции повторяют.
Предмет изобретения
1. Установка для проведения мореходных испытаний модели судна в опытном бассейне, содержащая несущую ферму с продольными направляющими, перемещающуюся вдоль последних каретку, вертикальный возвратно-поступательно перемещающийся пилон, соединяемый с моделью судна, силоизмеритель и устройство постоянной тяги, включающее в себя цилиндрическую винтовую пружину кручения, отличающаяся тем, что, с целью дистанциопного управления и расширения диапазона силы подтягивания модели судна, устройство постоянной тяги выполнено с моментным электродвигателем постоянного тока, выходной вал которого соединен тросо-блочной системой
с кареткой.
2. Установка по п. 1, отличающаяся тем, что, с целью повышения точности измерения буксировочного сопротивления за счет исключения влияния сил трения в подвижных узлах
установки на показания силоизмерителя, последний установлен на ферме-качалке, встроенной в каретку и кинематически взаимодействующей с пилоном.
ЧУЧ
