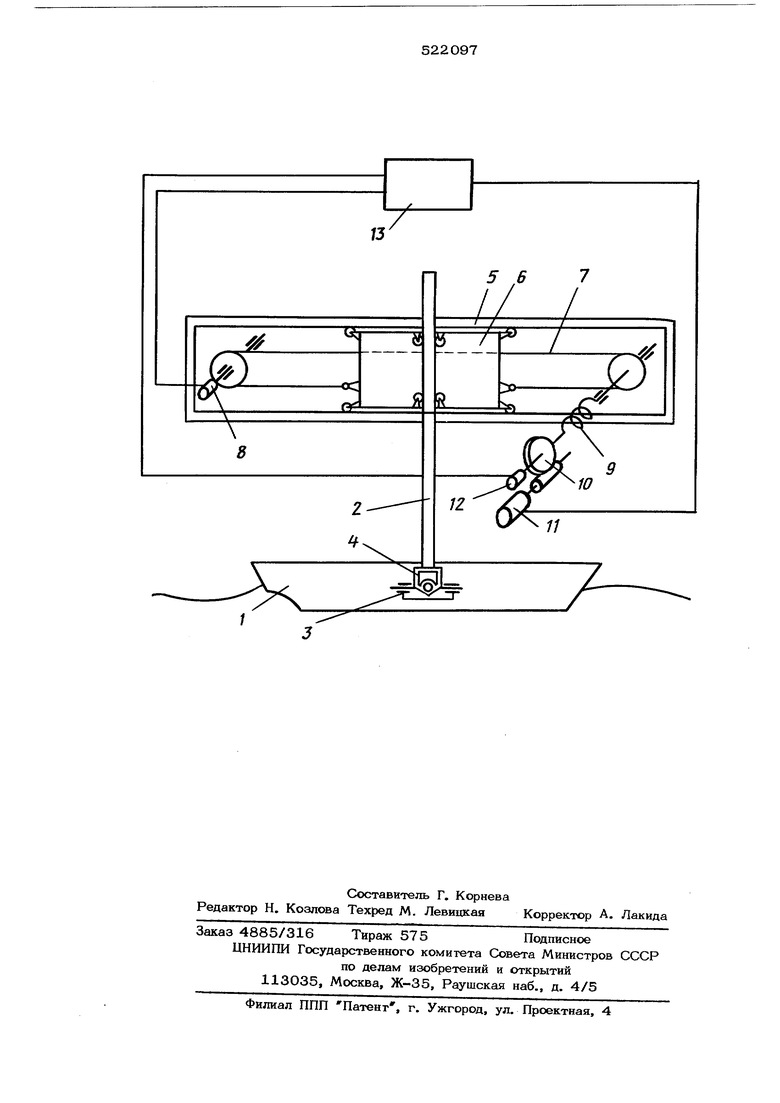
(54) УС1РОЙСТВО ДЛЯ МОРЕХОДНЫХ ИСПЫТАНИЙ МОДЕЛЕЙ СУД (Ж находится в среднем положении, при этом сигнал от датчика 8 положения также раве нулю, винтовая пружина 9 не закручена, дв гатель 11 не вращается. При наличии движения буксировочной те- лежки возникает сила сопротивления движению модели 1. Под действием этой силы карютка 6 сместится о-г положения равнове сия в сторону, противоположную направлени движения, закручивая через трособлочную систему 7 пружину 9, второй конец которо соединен с механизмом 1О закручивания. При этом, вследствие воздействия на модель 1 знакопеременной дополнительной силы волновой природы, модель вместе с кареткой 6 будет совершать еще и продольны колебательные движения. Вследствие малых размеров направляющих 5 и малой жесткости пружины каретка под действием сил сопротивления может до ти до конца направляющих. При этом ограничивается свобода колебательных движени модели, что приводит к изменению режима испытаний(буксировке с постоянной скоростью). Смещение каретки 6 от положения равновесия приводит к возникновению электрического сигнала на датчике 8 положения. Знак сигнала соответствует направлению смещения. Сигнал с датчика 8 поступает на преобразователь 13, где формируется сигнал для приведения во вращение двигателя 11. Двигатель 11, вращаясь, закручивает пружину 9, увеличивая силу подтягивания каретки 6 до такой величины, что положение равновесия средней силы сопротивления движению модели и силы подтягивания наступает, когда каретка 6 находится вблизи своего среднего положения, и знакопеременные сигналы с датчика 8 положения, вызванные колебательными перемещениями каретки, не проходят через преобразователь из-за наличия в нем зоны нечувствительности. В этом случае двигатель не вращается, автоматическая система не воздействует на каретку и не вызывает искажений при замере силы сопротивления. При изменении силы сопротивления (например, из-за изменения скорости буксировки) каретка смещается относительно своего среднего положения, автоматическая система вновь приходит в действие и, изменяя угол закручивания пружины, автоматически обеспечивает новый устойчивый режим буксировки. Формула изобретения Устройство для мореходных испытаний моделей судов, содержащее каретку с датчиком ее положения, установленную с во можностью перемещения в продольном направлении, и механизм постоянной тяги, включающий механически соединенную с кареткой винтовую пружину кручения с механизмом закручивания, приводимым во вращение от двигателя, отличающееся тем, что, с целью повышения производительности труда при проведении эксперимента, оно снабжено датчиком угла закручивания винтовой пружины и преобразователем с регулируемой зоной нечувствительности, входы которого соединены соответственно с датчиком угла закручивания винтовой пружины и датчиком положения каретки, а выход - с двигателем механизма закручивания.

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для буксировочных испытаний модели судна в опытовом бассейне | 1982 |
|
SU1057362A2 |
| УСТАНОВКА ДЛЯ МОРЕХОДНЫХ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВ | 1972 |
|
SU334116A1 |
| УСТАНОВКА ДЛЯ ПРОВЕДЕНИЯ МОРЕХОДНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1969 |
|
SU243420A1 |
| Установка для испытания моделей судов | 1973 |
|
SU474458A1 |
| Установка для буксировочных испытаний моделей судов | 1983 |
|
SU1105369A1 |
| Устройство для имитации движения судна при испытаниях в опытовом бассейне | 1984 |
|
SU1248885A1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| Установка для испытаний моделей судов | 1976 |
|
SU582139A2 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ДВИЖЕНИЯ СУДОВ | 2000 |
|
RU2225314C2 |