Известна гидравлическая система управления приводами шахтных гидравлических крепей при автоматическом, дистанционном и ручном управлении, имеющая источник питания и блоки управления с электромагнитными гидравлическими усилителями типа соплозаслонка.
Предложенная системы управления отличается от известной тем, что блоки управления соединены между собой последовательно, а каждый из них снабжен подпорным клапаном.
Это сокращает расход рабочей жидкости для питания усилителей.
Кроме того, подпорный клапан выполнен в виде подпружиненного золотника-пилота, соединенного каналами с гидравлическим усилителем.
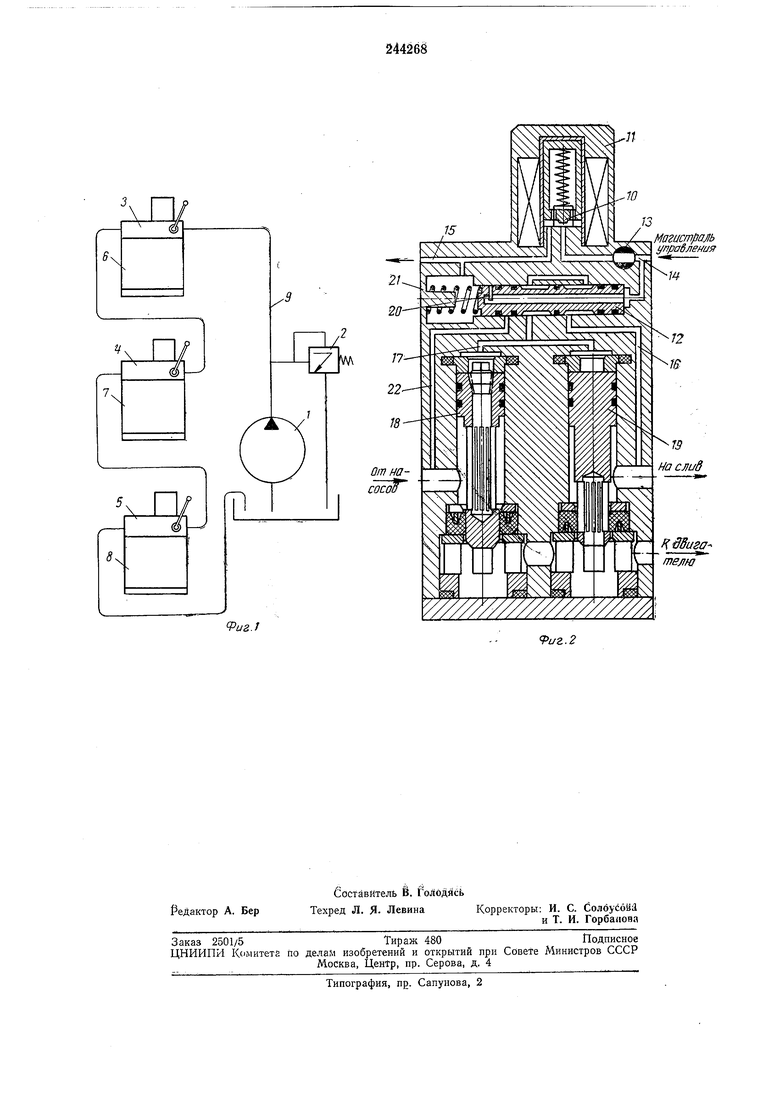
На фиг. 1 изображена принципиальная схема системы управления гидравлическими приводами; на фиг. 2 - блок управления.
Описываемая система управления содерл ит насос 1 с переливным клапаном 2, блоки управления 3, 4 и 5, предназначенные для управления отдельными распределителями 6, 7 и 8, и магистраль управления 9, которая проходит через все блоки управления.
лотййка-пилОта 12 с мягкими уплотнениями, коммуникационных каналов и поворотного крана 13, предназначенного для ручного управления распределителем. Рабочая жидкость
магистрали управления по .каналу 14 подается от предыдущего блока управления, а по каналу 15 она направляется к последующему блоку управления. Для приведения системы управления в рабочее состояние включается насос. При этом поток жидкости магистрали управления свободно проходит через все блоки управления и попадает в сливную магистраль гидросистемы. Таким образом, в исходном положении
система управления работает в режиме холостого хода. Этим она отличается от системы управления с параллельным соединением блоков управления, где при выключенных электромагнитах давление рабочей жидкости достигает максимального значения.
При включении питания обмотки электромагнита jia любом блоке управления, входящем в систему, якорь под действием магнитного потока преодолевает сопротивление слабой возвратной пружины и прижимает к седлу затвор клапана 10 преграждая свободный доступ рабочей жидкости из канала 14 в канал 15. В результате этого между каналами возникает перепад давлений, который сменне. При этом напорная магистраль 16 управляемого распределителя соединяется с магистралью питания сервопривода 17, в результате чего клапаны 18 и 19 смещаются вниз, соединяя магистраль «к гидродвигателю с магистралью «от насоса. Для одновременного управления несколькими распределителями золотник-пилот одновременно выполняет функции подпориого клапаиа. Для этого на его поверхности имеется канал 20, который при смещении золотника-пилота влево пропускает поток жидкости, обеспечивая этим возмолшость управления любым из предыдущих и последующих блоков управления. Для удержания золотника-пилота в левом положении перепад давления между каналами может не превыщать 10 кгс/см. Эта величина лимитируется жесткостью возвратной пружины 21, которая должна вернуть золотник-пилот в исходное положение при открь-пом клапане электромагнита и кране ручного управления. При отключении питания электромагнита якорь вместе с клапаном 10 под действием слабой возвратной пружииы и перепада давления в каналах 14 и 15 поднимается в крайнее положение. В результате этого полностью исчезает перепад давления между каналами 14 и 15, и возвратная пружина 21 устанавливает золотиик-иилот в исходное иолол ение. При этом магистраль сервопривода отключается от напорной магистрали системы и через канал 22 соединяется со сливом. В результате этого клапаны 18 и 19 распределителя переключаются в крайнее верхнее положение, отключая гидродвигатель от источника давления и соединяя его со сливом. Кран ручного управления установлен последовательно на один канал с клапаном электромагнита и выполняет те же функции. Поэтому при переключении его в блоке управления и гидрораспределителе происходят те же явления, что и при переключении электромагнита. При включении нескольких блоков уцравления одновременно полный перепад давлений в магистрали управления равен сумме перепадов давления в отдельных блоках управления. Поэтому переливной клапан 2 настраивается на давление срабатывания в зависимости от необходимого количества одновременного включения блоков управления и перепада давления в .каждом блоке управления. Таким образом, предлагаемая система управления нозволяет при использовании электромагнитов малой мощности осуществлять автоматическое, дистанционное и ручное.управление гидроприводами, например, механизированных крепей очистных комплексов и агрегатов. Предмет изобретения 1.Гидравлическая система управления приводами шахтных гидравлических крепей при автоматическом, дистанционном и ручном управлении, имеющая источник питания и блоки управления с электромагнитными гидравлическими усилителями типа сопло-заслонка, огличающаяся тем, что, с целью сокращения расхода рабочей жидкости для питания усилителей, блоки управления соединены между собой последовательно, а каждый из них снабжен подпорным клапаном. 2.Гидравлическая система управления по п. 1, отличающаяся тем, что подпорный клапан выполнен в виде подпружиненного золотника-пшюта, соединенного с гидравлическим усилителем.
W
X
fPus.f
rj
/ Магистраль упрабления
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| УНИВЕРСАЛЬНАЯ ГИДР&СИСТЕМ.4 СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1971 |
|
SU307755A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Система управления гидравлическим прессом | 1983 |
|
SU1117231A1 |
| Гидравлический сервопривод управления гусеничной машиной | 1987 |
|
SU1426884A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1979 |
|
SU887333A1 |
| РАСПРЕДЕЛИТЕЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ ДЛЯ ГИДРАВЛИЧЕСКИХ СИСТЕМ ПРИВОДА | 1970 |
|
SU288487A1 |