Изаесткы способы коррекции следящих систем с помощью временного устройства, которое включается в моменты согласования по сигналу ошибки, уменьпш.я скорость двигателя на все время пере.ходного процесса.
Предложенный способ отличается от известны.х тем, что непрерывно сравнивают сигналы входного и выходного воздействий в замкнутой системе, размыкают систему при равенстве этих воздействий и периодически замыкаюг систему при иревышении выходного воздействия над входным. Такой способ коррекции замкнутых систем позволяет повысить качество переходного процесса при отработке входных воздействий.
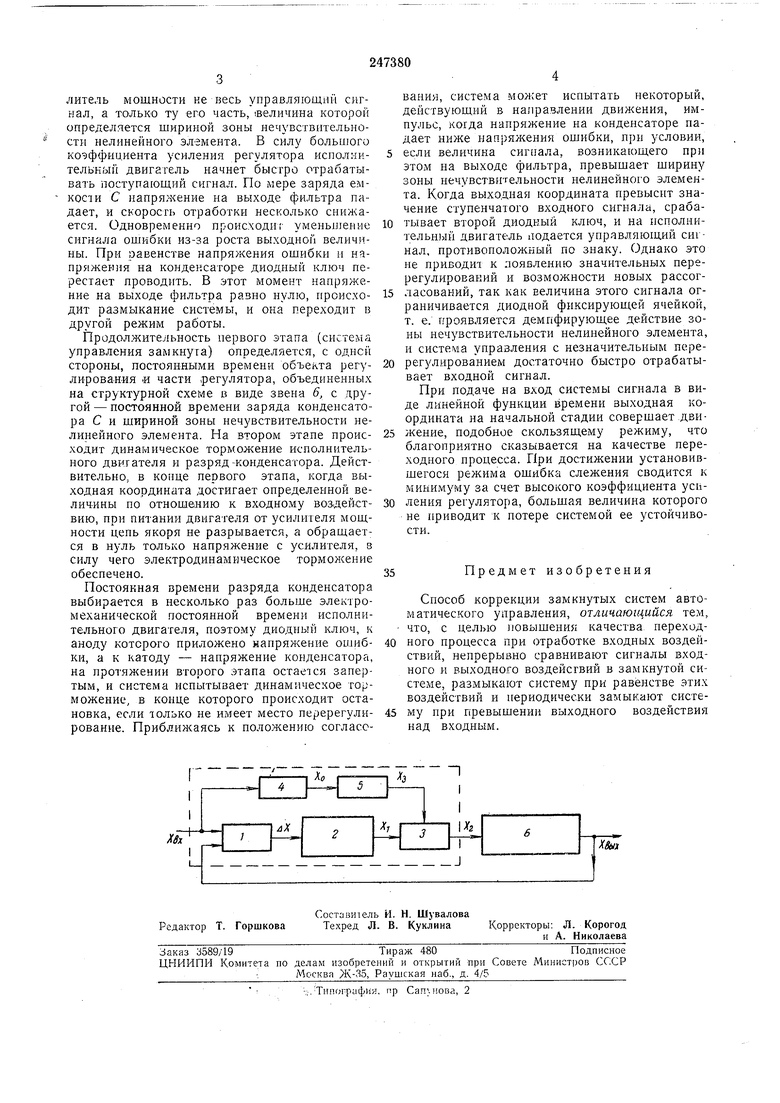
Структурная схема следящей системы, реализующей данный способ, изображена на чертеже. Под цифрой / обозначено логическое сравнивающее устройство, 2 - непрерывный управляющий фильтр, 3 - диодная ячейка, которая совместно с потенциометрическим делителем напряжения 4 и инвертором 5 образует фиксирующее устройство (нелинейный элемент с переменной зоной нечувсгвигельности), о - объект регулирования и часть регулятора. Логическое сравнивающее устройство выполняет следующие функции:
б)пропускает сигнал ошибки АА; на вход последующего звена при появлении задающего воздействия;
в)не пропускает сигнала ошибки с момента, когда выходная координата достигает определенной величины по отношению к входному сигналу;
г)пропускает сигнал оншбки на вход последующего звена в случае превышения выходной
координаты над задающим воздействием.
Таким образом логическое устройство выполняег в следящей системе операции сравнения и условного перехода в соответствии с временным состоянием входной и выходной координат.
Для пояснения нрината работы следящей системы предположим, что на ее вход в какойто момент времени подается ступенчатый сигнал XBX положительной полярности. Этот сигнал наиболее часто используется в практике при настройке автоматических систем, так как только при нем представляется возможность дать качественную картину процессов, происходящих в рассматриваемой системе. Входной
ступенчатый сигнал нройдет на вход управляющего фильтра RC. В начальный момент емкость С как бы замкнута накоротко, и цепь не дает ослабления. С выхода фильтра снимается весь приложенный к его входу сигнал. Однако
литель мощности ке весь управляющий сигнал, а только ту его часть, величина которой определяется щириной зоны нечувствительности нелинейного элемента. В силу больиюго коэффициента усиления регулятора исполнительный двигатель начнет быстро отрабатывать поступающий сигнал. По мере заряда емкости С напряжение на выходе фильтра падает, и скорость отработки несколько снижается. Одновременно происходи; уменьшение сигнала ошибки из-за роста выходной величины. При равенстве напряжения ошибки и напряжения на конденсаторе диодный ключ перестает проводить. В этот момент напряжение на выходе фильтра равно нулю, ироисходит размыкание системы, и она переходит в другой режим работы.
Продолжительность первого этапа (система управления замкнута) определяется, с одной стороны, постоянными времени объекта регулирования и части .регулятора, объединенных на структурной схеме в виде звена 6, с другой - постоянной времени заряда конденсатора С и шириной зоны нечувствительности нелинейного элемента. На втором этапе происходит динамическое торможение исполнительного двигателя и разряд-конденсатора. Действительно, Б конце первого этапа, когда выходная координата достигает определенной величины но отношению к входному воздействию, при питании двигателя от усилителя мощности цепь якоря не разрывается, а обращается в нуль только напряжение с усилителя, в силу чего электродинамическое тормол ;ение обеспечено.
Постоянная времени разряда конденсатора выбирается в несколько раз больше электромеханической постоянной времени исполнительного двигателя, поэтому диодный ключ, к аноду которого приложено напряжение ошибки, а к катоду - напряжение конденсатора, на протяжении второго этапа остается запертым, и система испытывает динамическое торможение, в конце которого происходит остановка, если только не имеет место перерегулирование. Приближаясь к положению согласования, система мол;ет испытать некоторый, действующий в направлении движения, импульс, когда напряжение на конденсаторе надает ниже напряжения ошибки, при условии,
если величина сигнала, возникающего при этом на выходе фильтра, превыщает щирину зоны нечувствительности нелинейного элемента. Когда выходная координата превысит значение ступенчатого входного сигнала, срабатывает второй диодный ключ, и на исполнительный двигатель подается управляющий сигнал, противоположный по знаку. Однако это не приводит к появлению значительных перерегулирований и возможности новых рассогласований, так как величина этого сигнала ограничивается диодной фиксирующей ячейкой, т. е. г.роявляегся демпфирующее действие зоны нечувствительности нелинейного элемента, и система управления с незначительным перерегулированием достаточно быстро отрабатывает входной сигнал.
При подаче на вход системы сигнала в виде линейной функции времени выходная координата на начальной стадии соверщает.движение, подобное скользящему режиму, что благоприятно сказывается на качестве переходного процесса. При достижении установившегося режима ошибка слежения сводится к минимуму за счет высокого коэффициента усаления регулятора, больщая величина которого не приводит к потере системой ее устойчивости.
Предмет изобретения
Способ коррекции замкнутых систем автоматического управления, отличающийся тем, что, с целью повышения качества переходного процесса при отработке входных воздействий, непрерывно сравнивают сигналы входного и выходного воздействий в замкнутой системе, размыкают систему при равенстве этих воздействий и периодически замыкают систему при превышении выходного воздействия над входным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Следящая система | 1979 |
|
SU840798A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящая система позиционирования | 1981 |
|
SU962842A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Следящая система | 1990 |
|
SU1829024A1 |
