В известных устройствах для регулирования расхода вещества при наличии транспортного запаздывания используют аналоговые регуляторы, что не позволяет получить высокую точность регулирования. Значительно улучшается качество регулирования при использовании дискретных регуляторов. В этом случае одной из настроек дискретного ;регулятора является .период квантования по времеии Т, который выбирается в зависимости от величины транспортного запаздывания и постоянной времени объекта регулирования и может достигать нескольких десятков секунд. Однако дискретные устройства подвержены действию статистических возмущений, которые вызываются неравномерностью подачи вещества, крупностью кусков материала и т. п. Эти возмущения не могут быть заранее учтены, а в силу того, что их длительность обычно много меньще периода квантования по времени, выбираемого исходя из динамических свойств объекта регулирования, воздействие регулятора на объект происходит без учета возмущений, действующих между двумя последовательными воздействиями, что существенно снижает точность регулирования.
торами, входы которых подключены к сравнивающему устройству, а рамки выходных ферродинамических преобразователей интеграторов включены последовательно и встречно на вход дискретного регулятора. Применение дискретных интеграторов позволяет усреднить возмущения в системе, действующие между двумя последовательными воздействиями регулятора на объект, и выработать воздействие регулятора на объект с учетом этих возмущений. Схема устройства приведена на чертеже.
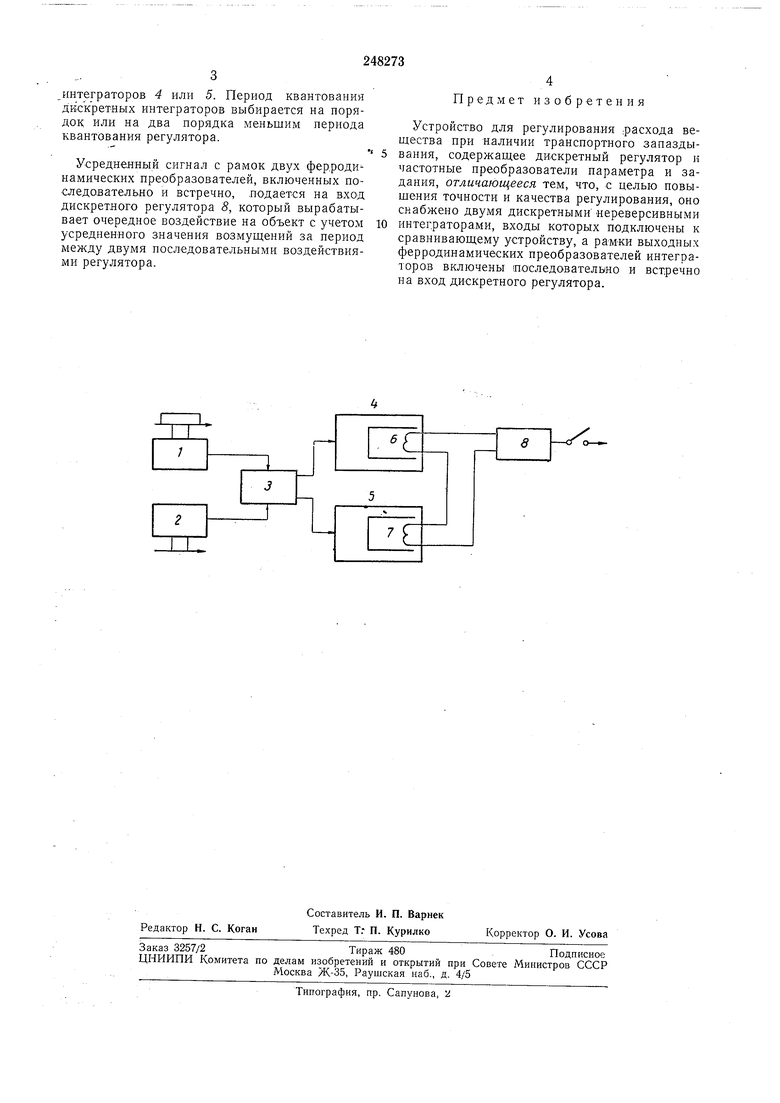
Выходы частотных преобразователей параметра / и задания 2 включены на вход вычитателя 3, два выхода которого подключены соответственно на входы двух нереверсивных дискретных интеграторов и 5. Интеграторы имеют выходные ферродинамические преобразователи 6 и 7, рамки которых включены последовательно и встречно на вход дискретного ПИ-регулятора 8.
Регулятор 8 воздействует на объект регулирования с периодом Т, выбираемым исходя из динамических свойств объекта регулирования. В промежутках между этими воздействиями статистические возмущения, накладываемые на параметр, усредняются в зависимости от знака возмущений одним из Двух дискретных
интеграторов 4 или 5. Период квантования д 1-скретных интеграторов выбирается на порядок или на два норядка меньшим нериода квантования регулятора.
.-
Усредненный сигнал с рамок двух ферроди намических преобразователей, включенных иоследовательно и встречно, додается на вход дискретного регулятора 8, который вырабатывает очередное воздействие на объект с учетом усредненного значения возмущений за период между двумя последовательными воздействиями регулятора.
Предмет изобретения
Устройство для регулирования ..расхода вещества при наличии транспортного запаздывания, содержащее дискретный регулятор и частотные преобразователи параметра и задания, отличающееся тем, что, с целью повышения точности и качества регулирования, оно снабжено двумя дискретными нереверсивными интеграторами, входы которых подключены к сравнивающему устройству, а рамки выходных ферродинамических преобразователей интеграторов включены последовательно и встречно на вход дискретного регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| БЕСКОНТАКТНЫЙ ПРОПОРЦИОНАЛЬНЫЙ ШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1966 |
|
SU187127A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Устройство для управления электромагнитной левитацией транспортного средства | 1987 |
|
SU1426871A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
