СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕИИЯ ПОЛОЖЕНИЕМ РЕЖУЩЕГО ОРГАНА ГОРНЫХ ВЫЕМОЧНЫХ МАШИН
Известен способ а1втоматичеокого управления .положением режущего органа горных выемочных машин, основанный на слежении за профилем кровли или почвы пласта непосредственно за режущим ортаном.
Предлагаемый способ отличается от известного тем, что управление положением режущего органа осуществляют .по суммарному сигналу, Получаемому при копировании кровли или почвы предыдущей дороги и одновременном измерении на ней толщины оачки полезного ископаемого.
Это позволяет в -процессе управления уменьшать .погрешности регулирования.
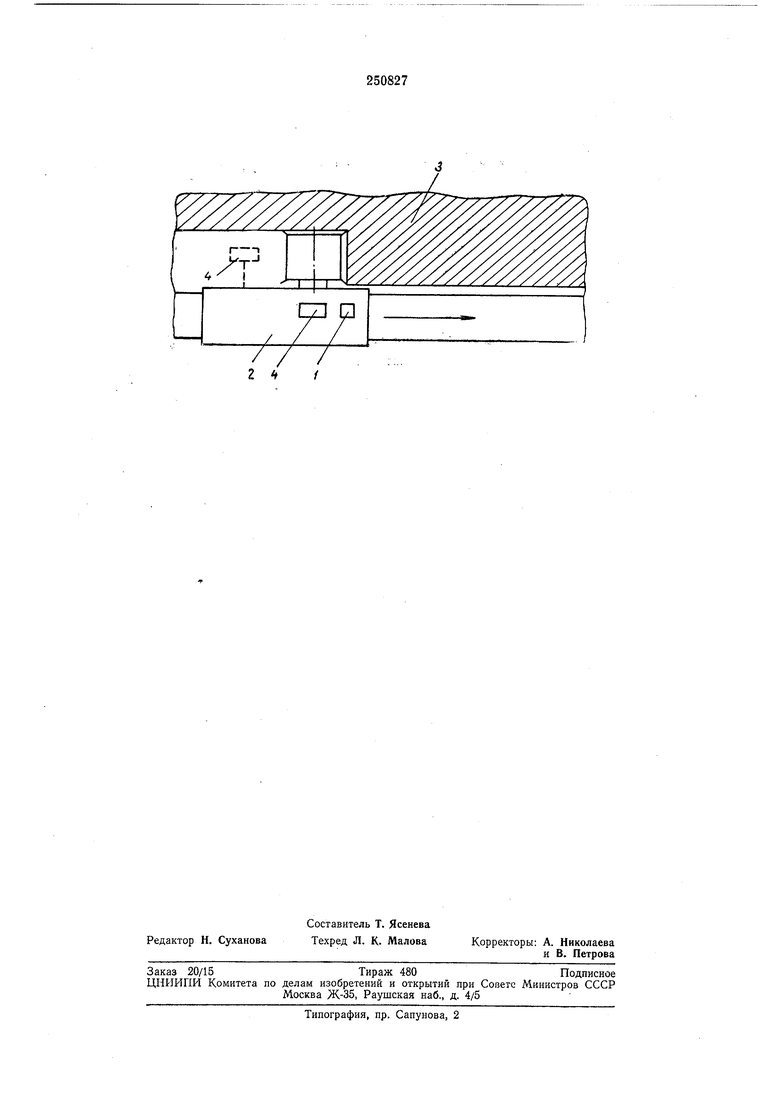
Па чертеже изображен датчик копирующего устройства, используемый .при осуществлении способа.
Датчик копирующего устройства или собственно копир 1 укрепляется на режущем органе комбайна 2 и следит за изменениями мощности пласта 3 при движении комбайна вдоль лавы. .Перемещения копира преобразуются одним из известных способов в сигналы рассогласования, реализуемые исполнительным механизмом подъема и опускания режущего органа. Для контроля .положения режущего органа устанавливается датчик .перемещения (индуктивный, ре.остатный и др.).
Датчи1к 4 скрытой границы порода-уголь (например, радиоизотопный) также укрепляется на ком|бай.не и движется .вместе с ним по старой дорожке. Если толщина пачки под датчиком (в лочве или кровле пласта) отличается от заданной, то сигнал рассогласования, .поступающий от датчика порода-пласт, воздействует на задатчик копирующего устройства, в результате чего вводится коррекция по отклонению от заданной толщины предохр-анительнойПачки.
Конструктивно датчик порода-пласт может быть совмещен с :копирующим устройством и выполнять одновременно две функции.
П р е .д м е т и з о б р е т е л и я
Способ автоматического управления положением режущего органа горных выемочных машин, основанный на слежении за профилем кровли или .почвы пласта, отличающийся тем, что, с целью уменьшения погрешностей регулирования, управление осуществляют .по суммарному сигналу, получаемому при копировании кровли или почвы .предыдущей дороги и одновременном измерении на ней толщины пачки (Полезного ископаемого.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР-КОПИР ДЛЯ ВЫЕМОЧНЫХ МАШИН | 1969 |
|
SU252987A1 |
| Способ контроля границы уголь-порода | 1980 |
|
SU933992A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ | 1971 |
|
SU310044A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Способ контроля положения исполнительного органа горной машины относительно границы уголь-порода и устройство для его осуществления | 1980 |
|
SU977770A1 |
| Способ автоматического управления положением режущего органа угледобыващей машины | 1972 |
|
SU466328A1 |
| СПОСОБ СЕЛЕКТИВНОЙ ВЫЕМКИ УГОЛЬНОГО ПЛАСТА И КОМБАЙН ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436954C2 |
| СПОСОБ СЛОЕВОЙ РАЗРАБОТКИ МОЩНОГО КРУТОНАКЛОННОГО УГОЛЬНОГО ПЛАСТА | 2011 |
|
RU2470157C1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| СПОСОБ ВЫЕМКИ УГОЛЬНЫХ ПЛАСТОВ | 1999 |
|
RU2149998C1 |