Предлагаемое нелинейное корректирующее устройство относится к области систем автоматического управления и может быть использовано в следящих системах, системах стабилизации и программного управления.
Известные нелинейные корректирующие устройства содержат конденсаторы, резисторы, диодные вентили и усилители. Недостатком известных устройств является их сложность.
Предложенное устройство отличается от известных тем, что в нем выход первого суммирующего устройства, один из входов которого служит входом системы управления, соединен через первый усилитель с одним из входов второго суммирующего устройства, а через последовательно соединенные второй усилитель и контакты двух релейных элементов-со вторым входом второго суммирующего устройства, выход которого соединен с входом исполнительного устройства системы управления.
Такое соединение элементов позволяет увеличить помехоустойчивость системы управления и упростить нелинейное корректирующее устройство, в котором эта цель достигается выносом линейного дифференциатора из основного канала системы управления в параллельную цепь и организацией его при помощи блока сигнатуры скорости сигнала ошибки.
который совместно с блоком сигнатуры самой ошибки системы управления составляет основу нелинейного корректирующего устройства-его цепи переключения.
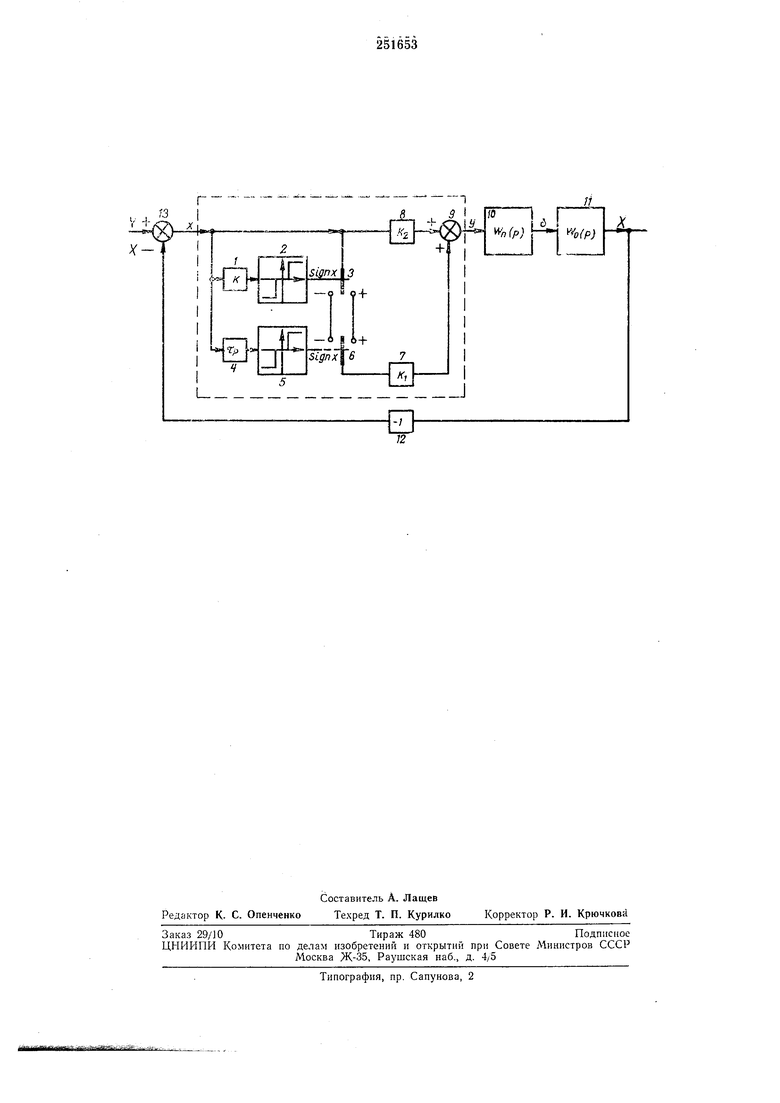
На чертеже дана структурная система автоматического управления, на которой пунктиром обозначено предлагаемое нелинейное корректирующее устройство, где /- усилитель; 2 - трехпозиционный поляризованный релейный элемент; 3 - контактная группа релейного элемента 2; 4 - дифференциатор; 5 - трехпозиционный поляризованный релейный элемент; 6 - контактная группа релейного элемента 5; 7 - усилитель; 8 - усилитель; 9 -исполнительное устройство (привод) с передаточной функцией Wn CPJ; И -объект управления с передаточной функцией; 12 - единичная обратная связь; 13 - суммирующее устройство.
Нелинейное корректирующее устройство имеет входом ошибку системы управления х, а выходной его сигнал у подается на привод 10 с передаточной функцией W (р), который оказывает регулирующее воздействие 5 на
объект управления 11 с передаточной функцией WCI(P). Регулируемая величина X сравнивается через единичную отрицательную главную обратную связь 12 с управляющим воздействием У на суммирующем устройстве получается ошибка системы управления х. Нелинейное корректирующее устройство состоит из двух ценей: 1),в которой находится усилитель 8 с коэффициентам усиления /Са и 2) в которой находится усилитель 7 с коэффициентом усиления /Ci. День с коэффициентом К постоянно включена в основной контур системы управления. Цепь же с коэффициентом Al подключается параллельно цепи с /Са во время работы устройства. Сигнал ошибки подается одновременно на два блока: 1)сигнатуры .сигнала ошибки, состоящей из усилителя / с коэффициентом усиления К, 3-позициониого поляризованного релейного элемента 2 и его контактной группы 3 и 2)сигнатуры скорости сигнала ошибки, состоящей из дифференциатора4 с передаточной функцией W(p)T:P (где т - постоянная времени дифференцирования, Р - оператор Лапласа), 3-позиционного поляризованного релейного элемента 5, идентичного 2, и его контактной группы 6, также идентичной 3. Зона нечувствительности 3-позиционных поляризованных релейных элементов 2 и 5 регулируется электрическим путем за счет соответствующего выбора коэффициентов /С и т. Если сигнал ошибки х и сигнал скорости ошибки , информирующий о последующем изменении сигнала ошибки, имеют одинаковые знаки (подвижные контакты групп 3кб замкнуты влево или вправо). На выходе нелинейного корректирующего устройства должен быть максимальный сигнал соответствующего знака для быстрейщего возвращения к номинальному значению регулируемой величины X. Действительно, при этом на выходе суммирующего устройства у (Ki + K..)x, так как цепь усилителя /Ci замкнута. Если же сигнал ошибки и сигнал скорости ошибки имеют разные знаки (подвижные контакты групп 5 и 6 замкнуты в разные стороны), значит нужно ожидать изменения знака ошибки. Поэтому на выходе нелинейного корректирующего устройства должен быть уже не максимальный сигнал, а некоторое промежуточное значение. Действительно, при этом . Таким образом, нелинейное корректирующее устройство осуществляет алгоритм (К1 + 1 К хпри X X Q который, как известно, является нелинейным эквивалентом линейного форсирующего звеиа. Очевидно, что высокочастотная помеха теперь проходит по основному каналу системы без подчеркивания, что опасности, с точки зрения устойчивости, нет. С помехой же, попадающей в цепи блоков сигнатуры ошибки и ее скорости, можно бороться при помощи зон нечувствительности 3-позиционных поляризованных релейных элементов 2, 5 за счет соответствующего подбора коэффициентов К и -г усилителя / и дифференциатора 4 соответственно. Нредмет изобретения Нелинейное корректирующее устройство для системы автоматического управления, содержащее два суммирующих устройства, два усилителя, блоки сигнатуры сигнала ошибки и сигнала скорости изменения ошибки с трехпозиционными релейными элементами, отличающееся тем, что, с целью увеличения помехоустойчивости и упрощения устройства, в нем выход первого суммирующего устройства соединен через первый усилитель с одним из входов второго суммирующего устройства, а через последовательно соединенные второй усилитель и контакты двух релейных элементов - со вторым входом второго суммирующего устройства, выход которого соединен с входом исполнительного устройства системы управления.
/;
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |