Изобретение относится к области систем автоматического регулирования, в частности систем стабилизации.
Известные способы демпфирования вынужденных .колебаний систем регулирования, в которых для управления амплитудой автоколебаний иснользуют сигналы, пропорциональные скорости движения выходной координаты, неэффективны в условиях отсутствия информации о скорости.
Предложенный способ отличается от известных тем, что при нем измеряют раздельно длительность полуцикла автоколебания каждого нснолнитель1ного устройства, преобразуют результаты измерения в электрические сигналы, сравнивают эти сигналы и в соответствии со знаком разностного сигнала на границе зоны чувствительности донолнительно включают двигатель с большой длительностью нолуцикла и выключают двигатель при достижении ВЫХОДНОЙ координатой противоноложной границы зоны нечувств-ительности.
Это обеспечивает уменьшение амплитуды автоколебаний в системе с двумя нереверсивными релейными исполнительными услрожтвами и повышение экономичности исполнительных устройств при отсутствии инфор1мации о скорости движения выходной координаты.
Пусть замкнутая система регулирования состоит из объекта регулирования, измерительного устройства, усилителя-преобразователя и иснолнительного двигателя, имеющего релейную характеристику.
Дифференциальное уравнение движения объекта регулирования имеет вид
да /«д - тв, .(1)
где: ф - угловое отклонение объекта регулирования от заданного;
М„
М,
;/Ив -
т„ I ° /
/-момент инерции объекта регулирования;
%, ./Ид, -движущие моменты, .создаваемые раздельно двумя нереверсивными двигателямн;
MS - ностоянно действующий возмущающий момент.
В зависимости от управляющего сигнала с усилителя (сигнал 6у) момент, развиваемый двигателем, будет равен:
Жд.
Жд(у) 0(2)
вительности двигателя меньше зоны нечувствительности измерительного устройства, и ее мож.но не учитывать.
Измерительное устройство выдает сигнал f/иу , проиорциональный угловому отклонению объекта от заданного:
/СиуПрИ(р + 0
иу
О при + S
- АГиу ПрИср -о,
где /Сиу - крутизна измерительного устройства.
Усилитель-преобразователь усиливает сигнал, поступающий с измерительного устройства, и преобразует его в форму, необходимую для управления двигателем:
/у Ду/Гиу,(4)
где /Су-коэффициент передачи усилителяпреобразователя.
Уравнения (1) - (4), описывающие движение замкнутой системы, можно свести к виду:
прио - 8
при - о - 9 Ь (
при
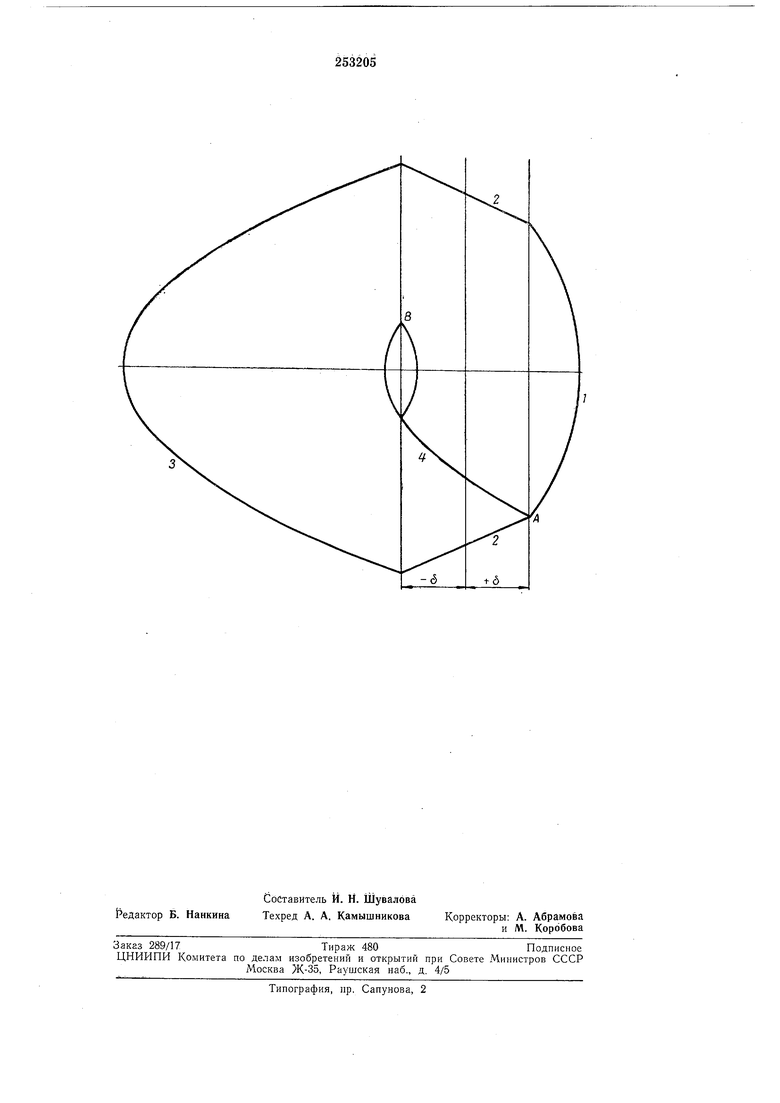
По полученной системе уравнений (5) можно построить фазовый лортрет системы.
Фазовый портрет (см. чертеж) представляет собой семейство замкнутых фазовых траекторий типа «центр ; в системе имеется бесчисленное множество периодических движений, определяемых начальными условиями.
Фазовая траектория состоит из трех участков.
KaiK только угловое отклонение объекта от заданного станет больще величины зоны нечувствительности , включается двигатель, создающий момент на уменьщение углового отклонения (участок 1). При двигатель выключается, и объект движется под действием возмущающего момента (участок 2). В момент времени, когда , двигатель создает момент противопололшого знака, возвращая объект к заданному положению (участок -3). Таким образом, устанавливается колебательный режим с поочередным включением двигателя в одну или другую сторону.
Пусть при некоторых начальных условиях
о о
И Ц) в системе возникают автоколебания. При постоянно действующем моменте MB время работы двигателя в одну сторону будет меньще, чем в другую. Измеряя время работы двигателя в одну и другую стороны за один полный цикл и сравнивая эти времена, получают косвенную оценку направления возмущающего момента Мд и информацию для изменения параметров имеющегося предельного цикла. Если двигатель на участке 1 работает больщее время, чем на участке 2, то, преобразовав полученную разность времен в электрический сигнал, по его знаку подают команду на включение двигателя на участке 2 (который обычно включается при значении силнала ) при значении А б, т. е. в тот момент, когда производится отключение двигателя на участке 1 (точка Л). Отклонение объекта от заданного положения уменьщается, так как происходит парирование возмущающего момента в зоне нечувствительности, что прежде не обеспечивалось (участок-).
В .момент времени, когда , двигатель отключается (точка В), и объект движется под действием возмущающего мо.мента, причем угловое отклонение не превыщает величины 6, т. е. включения двигателя на работу в противоположном направлении не происходит.
Таким образом, в системе устанавливается новый предельный цикл с включением только
одного двигателя. Параметры лредельного цикла можно свести к допустимым соответствующим выбором величин движущих моментов Мд ,и коэффициентов передачи системы.
Предмет изобретения
Способ демофирования вынужденных колебаний систем регулирования, отличающийся тем, что, с целью уменьщения амплитуды автоколебаний.в системе с двумя нереверюивными релейными исполнительными устройствами и повыщения экономичности исполнительных устройств при отсутствии информации о скорости движения выходной координаты, измеряют .раздельно длительность полуцикла автоколебания каждого исполнительного устройства, преобразуют результаты измерения в электрические сигналы, сравнивают эти сигналы и в соответствии со знаком разностного сигнала на границе зоны чувствителыности дополнительно включают двигатель с больщей длительностью полуцикла и выключают двигатель при достижении выходной координатой противоположной границы зоны нечувствительности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| Способ управления | 1975 |
|
SU805247A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Способ управления ориентацией космического объекта | 1990 |
|
SU1811500A3 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Устройство для определения координат упругого объекта в автоматизированном электроприводе | 1985 |
|
SU1327057A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |