1
Изобретение относится к измерительной технике и может быть использовано в высокоточных системах измерения и автоматического регулировани координат электромеханических объектов с упругой кинематической связью, например в приводах подачи металлорежущих станков, для демпфирования упругих колебаний исполнительных механизмов .
Цель изобретения - повышение быст ,родействия и расширение области применения-.
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит датчик 1 скорости, первьш интегратор 2, измеритель 3 рассогласования, второй инте
гратор 4, датчик 5 угла закрутки, релейный элемент 6, ускоряющий элемент 7, фильтр 8 и сумматор 9.
На чертеже обозначены: и
% -угловые перемещения валов двигателя -и механизма,.приведенные-К валу двигателя; ы, - скорость двиг ателя; й -Р- угол закрутки; w, ,, , АЧ, i( - наблюдаемые координаты объекта; w - фильтрованный сигнал по ускорению объекта.
Устройство работает следующим образом.
Контур, состоящий из первого интегратора 2, измерителя 3 рассогласования, релейного элемента 6, второго интегратора 4 и сумматора 9 представляет собой релейную следящую систему управляемую по двум входам: и, и /ЛР.
А1
При этом сигнал на выходе первого интегратора 2 следит за изменением управляющего сигнала д -Р и, следовательно, сигнал л4 на выходе сумматора 9 следит за его производной i . Так как скорости двигателя и механизма связаны соотношением, то сигнал ы на выходе второго РИ1тегратора 4 будет описывать скорость u), , а на его входе - производную и). Для сглаживания высокочастотных импульсаций,
/
содержащихся в сигнале и
на выход
релейного элемента 6 фильтр 8.
устанавливается
В указанной релейной следящей системе установится автоколебательный режим с относительно низкой частотой автоколебаний, близкой к собственной частоте наблюдающего устройства. Поэтому для сглаживания сигнала Wj требуется устанавливать фильтр 8 с боль
5
шой постоянной времени Т, что ограничивает быстродействие наблюдающего
г устройства.
С целью повышения частоты автоколебаний в системе и, следовательно, быстродействия наблюдающего устройства применен ускоряющей элемент 7 в виде динамического звена VI (Р)
К --, охватывающего релейный элеt/ , Jr | I
мент 6, В этом случае частота автоколебаний f определяется внутренним контуром, состоящим из релейного 6 и ускоряюш,его 7 элементов, поэтому ее можно изменять выбором параметров К и -&., ,
Сравнительный анализ прототипа и предлагаемого устройства показыва
ет, что реакция обоих устройств на управляющее воздействие одинакова и близко совпадает с реакцией объекта. Однако реакция на возмущающее воздействие - разная. Прототип тем медленнее реагирует на возмущение, чем рлилсе коэффициент соотношения масс : к единице, т.е. чем слабее обратное воздействие механизма на двигатель - через упругое, звено. В пределе при прототип не реагирует на возму- воздействия. Реакция предлагаемого -устройства на возмущающее воздействие практически не отличается от реакции объекта, следовательно, его динамическая точность в переходных процессах существенно выше, т.е. предлагаемое устройство вырабатьшает более достоверную информацию о координатах объекта. Такие же условия имеют место и при вариациях парамет5
0
g
ров механизма (жесткости С. и момента инерции Ig). Указанные явления ограничивают область применения прототипа объектами с коэффициентом , в то время как для предлагаемого устройства такие ограничения отсутствуют.
Таким образом, повышение быстродействия и расширение области применения достигается использованием угла закрутки упругого элемента в качестве второго входного сигнала наблюдающего устройства, который измеряется датчиком угла закрутки, а также вве- релейного и ускоряющего элементов, позволяющих формировать заданные динамические свойства наблюдающего устройства.
Формула изобретения
Устройство для определения координат упругого объекта в автоматизированном электроприводе, содержащее датчик скорости, первьш и второй интеграторы, измеритель рассогласования, подключенный первым входом к выходу первого интегратора, отличающееся тем, что, с целью повьшения быстродействия и расширения области применения, устройство содержит датчик угла закрутки, релейный элемент, ускоряющий элемент.
Редактор А.Лежнина
Составитель А.Лащев
Техред В.Кадар Корректор В.Бутяга
Заказ 3388/АЗ Тираж 863 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
и сумматор, выход датчика угла закрутки соединен с вторьм входом измерителя рассогласования, подключенного выходом к первому входу релейного элемента, выход которого через ускоряющий элемент соединен с вторым своим входом, через второй интегратор - с первым входом сумматора, а непосредственно - с входом фильтра, второй вход и выход сумматора соединены соответственно с выходом датчика скорости и входом первого интегратора.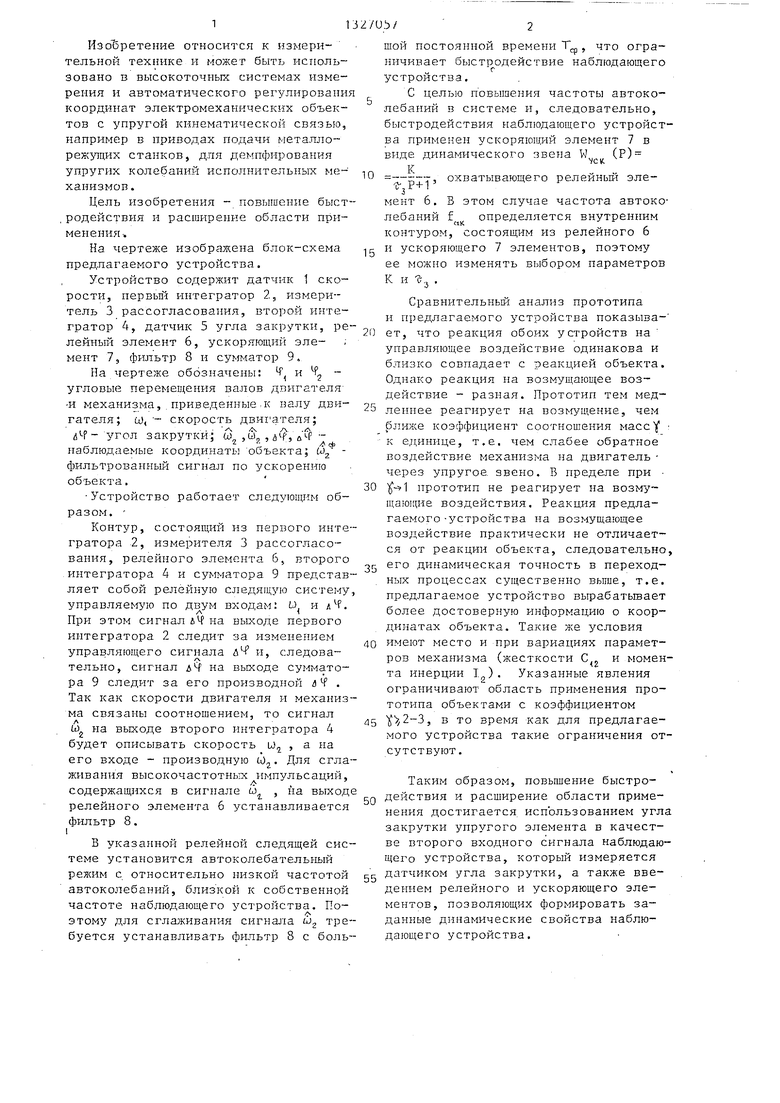
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Система управления | 1983 |
|
SU1120283A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
Изобретение относится к измерительной технике и может быть использовано в высокоточных системах измерения и автоматического регулирования координат электромеханических объектов с упругой кинетической связью, например в приводах подачи металлорежущих станков, для демпфирования колебаний исполнительных механизмов. Цель изобретения - повышение быстродействия и расширения области применения. Она достигается тем, что в устройстве вместо датчика тока использован датчик угла закрутки и введены релейный и ускоряющий элементы, сумматор и фильтр. 1 ил. (Л
| РСЭП | |||
| Сер | |||
| Электропривод, 1980, № 3 (83), с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Боровиков М.А | |||
| Теория, разработка и исследование автоматизированных электроприводов с упреждающей коррекцией; Дне | |||
| д-ра техн | |||
| наук | |||
| Ульяновск: УПИ, 1984, с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
