Известны универсальные прибОры для комплексного однопрофильного контроля кинематической погрешности цилиндрических зубчатых -колес, содержащие ведущий и ведомый шпиндели для установки на них контролируемой пары зубчатых колес; устройство для настройки на заданиое межцентровое расстояние; привод для вращения ведущего шпинделя; индуктивный датчик, состоящий из якоря и корпуса; кинематическую цепь для передачи образцового движения от ведущего шпинделя на корпус индуктивного датчика, включающую гибкую ленту, охватывающую ведущий шпиндель, ведущую каретку, воспринимающую перемещение указанной ленты, рычаг, одно плечо которого воспринимает перемещение ведущей каретки, ведомую каретку с корпусом индуктивного датчика, перемещающуюся посредством другого плеча рычага; кинематическую цепь для передачи движения от ведомого шпинделя на якорь датчика, состоящую из гибкой ленты, охватывающей ведомый шпиндель, на которой крепится якорь датчика; устройство для изменения соотношения плеч рычага в соответствии с передаточным отношением контролируемой пары колес.
врашения шпинделей, а гибкие ленты, охватывающие шпиндели, параллельны друг другу. Изготовить и аттестовать прямой рычаг можно значительно точнее, чем угловой, а так как рычаг входит в образцовую кинематическую цепь, то точность его изготовления и аттестации в значительной степени определяет точность контроля, причем последняя повышается.
Для повышения точности прибора цилиндрические поверхности шпинделей, по которым их охватывают гибкие ленты, являются одновременно и опорными поверхностя.ми этих шпинделей.
Кроме этого, предлагаемый нрибор снабжен перекидным фрикционным устройством, связывающим якорь индуктивного датчика с одной или другой ветвью гибкой ленты ведомого шпинделя, что позволяет контролировать колеса внешнего и внутреннего зацеплений.
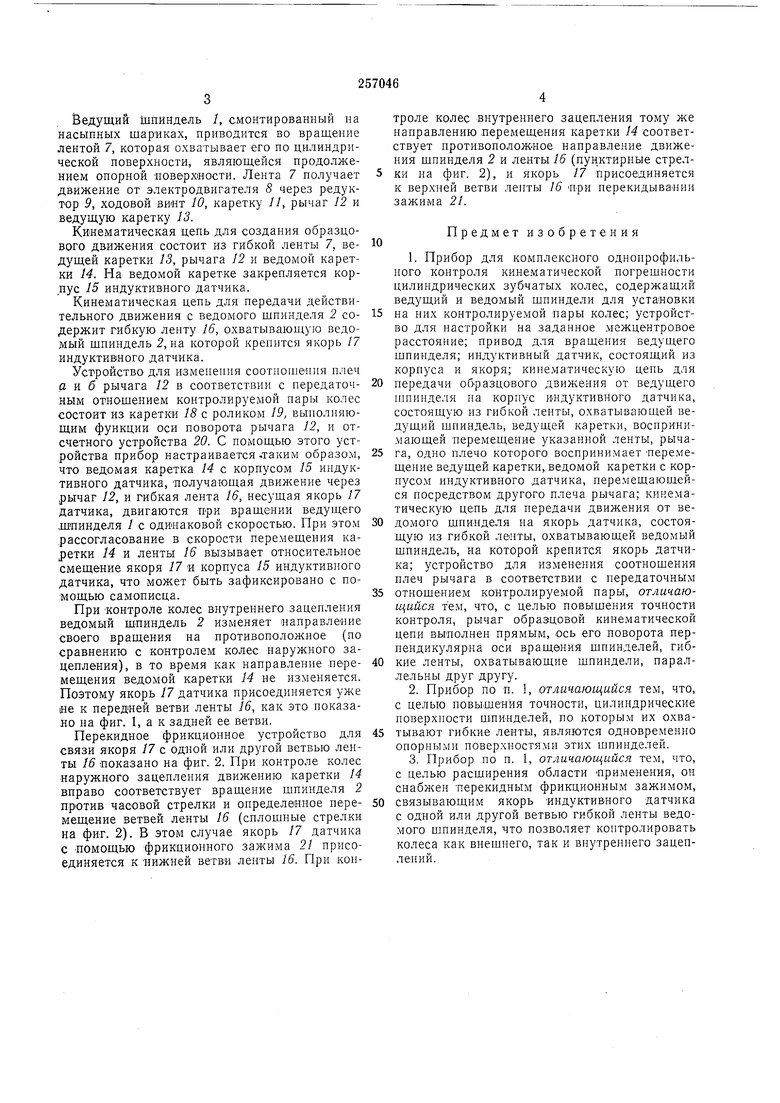
На фиг. 1 изображена схема описываемого прибора; на фиг. 2 - перекидное фрикционное устройство.
Прибор содержит ведущий и ведомый шпиндели 1 и 2, на которых устанавливаются колеса 3 и 4 контролируемой пары, устройство для настройки на требуемое межцентровое расстояние, включающее каретку 5 и отсчетное устройство 6.
Ведущий шпиндель /, смонтированный на насыпных шариках, приводится во вращение лентой 7, которая охватывает его по цилиндрической поверхности, являющейся продолжением опорной поверхности. Лента 7 получает движение от электродвигателя 8 через редуктор 9, ходовой винт 10, каретку 11, рычаг 12 и ведущую каретку 13.
Кинематическая цепь для создания образцового движения состоит из гибкой ленты 7, ведущей каретки 13, рычага 12 и ведомой каретки 14. На ведомой каретке закрепляется корпус 15 индуктивного датчика.
Кинематическая цепь для передачи действительного движения с ведомого шпинделя 2 содержит гибкую ленту 16, охватывающую ведомый шпиндель 2, на которой крепится якорь 17 индуктивного датчика.
Устройство для изменения соотношения плеч а и б рычага 12 в соответствии с передаточным отношением контролируемой пары колес состоит из каретки 18 с роликом 19, выполняющим функции оси поворота рычага 12, и отсчетного устройства 20. С помощью этого устройства прибор настраивается-таким образом, что ведомая каретка 14 с корпусом 15 индуктивного датчика, -получающая движение через рычаг 12, и гибкая лента 16, несущая якорь 17 датчика, двигаются при вращении ведущего дапинделя 1 с одинаковой скоростью. При этом .рассогласование в скорости перемещения каретки 14 и ленты 16 вызывает относительное смещение якоря 17 и корпуса 15 индуктивного датчика, что может быть зафиксировано с помощью самописца.
При Контроле колес внутреннего зацепления ведомый щ-пиндель 2 изменяет направление своего вращения на противоположное (по сравнению с контролем колес наружного зацепления), в то время как направление перемещения ведомой каретки 14 не изменяется. Поэтому якорь 17 датчика присоединяется уже не к передней ветви ленты 16, как это показано на фиг. 1, а к задней ее ветви.
Перекидное фрикционное устройство для связи якоря 17 с одной или другой ветвью ленты 16 показано на фиг. 2. При контроле колес наружного зацепления движению каретки 14 вправо соответствует вращение шпинделя 2 против часовой стрелки и определенное перемещение ветвей ленты 16 (сплошные стрелки на фиг. 2). В этом случае якорь 17 датчика с ПОМОЩЬЮ фрикционного зажима 21 присоединяется к Нижней ветви ленты 16. При контроле колес внутреннего зацепления тому же направлению перемещения каретки 14 соответствует противоположное направление движения шпинделя 2 и ленты 16 (пунктирные стрелки на фиг. 2), и якорь 17 присоединяется к верхней ветви ленты 16 нри перекидывании залсима 2L
Предмет изобретения
1.Прибор для комплексного однопрофильного контроля кинематической погрешности цилиндрических зубчатых колес, содержащий ведущий и ведомый шпиндели для установки на них контролируемой пары колес; устройство для настройки на заданное межцентровое расстояние; привод для вращения ведущего шпинделя; индуктивный датчик, состоящий из корпуса и якоря; кинематическую цепь для передачи образцового движения от ведущего шпинделя на корпус индуктивного датчика, состоящую из гибкой ленты, охватывающей ведущий шпиндель, ведущей каретки, воспринимающей перемещение указанной ленты, рычага, одно плечо которого воспринимает -перемещение ведущей каретки, ведомой каретки с корпусом индуктивного датчика, перемещающейся посредством другого плеча рычага; кинематическую цепь для передачи движения от ведомого шпинделя на якорь датчика, состояшую из гибкой ленты, охватывающей ведомый шпиндель, на которой кренится якорь датчика; устройство для изменения соотношения плеч рычага в соответствии с передаточным отношением контролируемой пары, отличающийся тем, что, с целью повышения точности контроля, рычаг образцовой кинематической цепи выполнен прямым, ось его поворота перпендикулярна оси вращения шпинделей, гибкие ленты, охватывающие шпиндели, параллельны друг другу.
2.ПрибОр по п. I, отличающийся тем, что, с целью повыщенИя точности, цилиндрические поверхности шлинделей, по которым их охватывают гибкие ленты, являются одновременно опорными поверхностями этих шпинделей.
3.Прибор по п. 1, отличающийся тем, что, с целью расширения области применения, он снабжен перекидным фрикционным зажимом, связывающим якорь индуктивного датчика с одной или другой ветвью гибкой ленты ведомо-го шпинделя, что позволяет контролировать колеса как внешнего, так и внутреннего зацеплений.
-г -f№
f( чупць/
98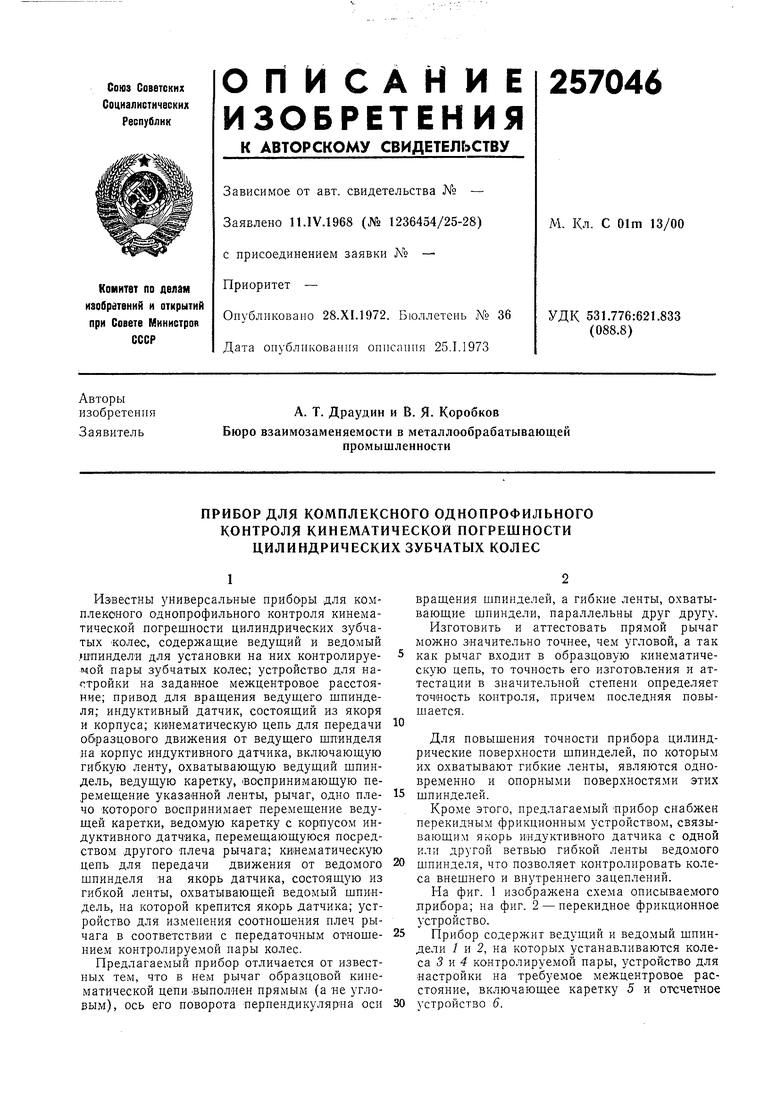
/б
77 / / /
JLJ
sc
