Настоящее изобретение может быть использовано при проектировании и исследовании гироскопических приборов.
Р1звестны динамические моделирующие стенды для испытаний гироскопических приборов, в которых может воспроизводиться угловое движение объекта управлении вокруг одной оси и ограничен диапазон малых установившихся угловых скоростей.
Предлагаемый динамический моделирующий стенд для испытания гироскопических приборов отличается от известных тем, что элементы следящего привода с редуктором и платформа с управляемой осью размещены в обще М блоке, который снабжен приводом для его разворота на заданный угол вокруг горизонтальной оси, перпендикулярной управляемой оси платформы, на которой установлен кронщтейн с регулируемым упором, снабженный фланцем для крепления испытуемого гироскопического прибора, разворачивающимся в своей плоскости на заданный угол.
Это расщиряет возможносги моделирования углового движения объекта управления и увеличивает диапазон малых установившихся угловых скоростей.
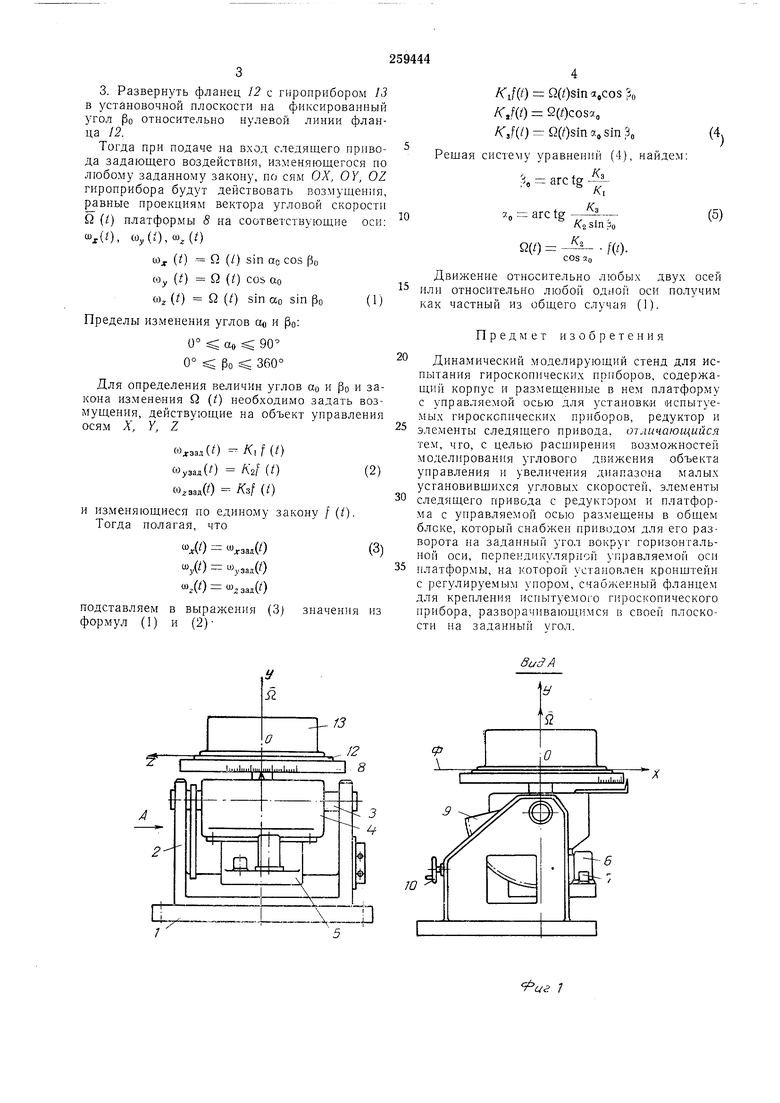
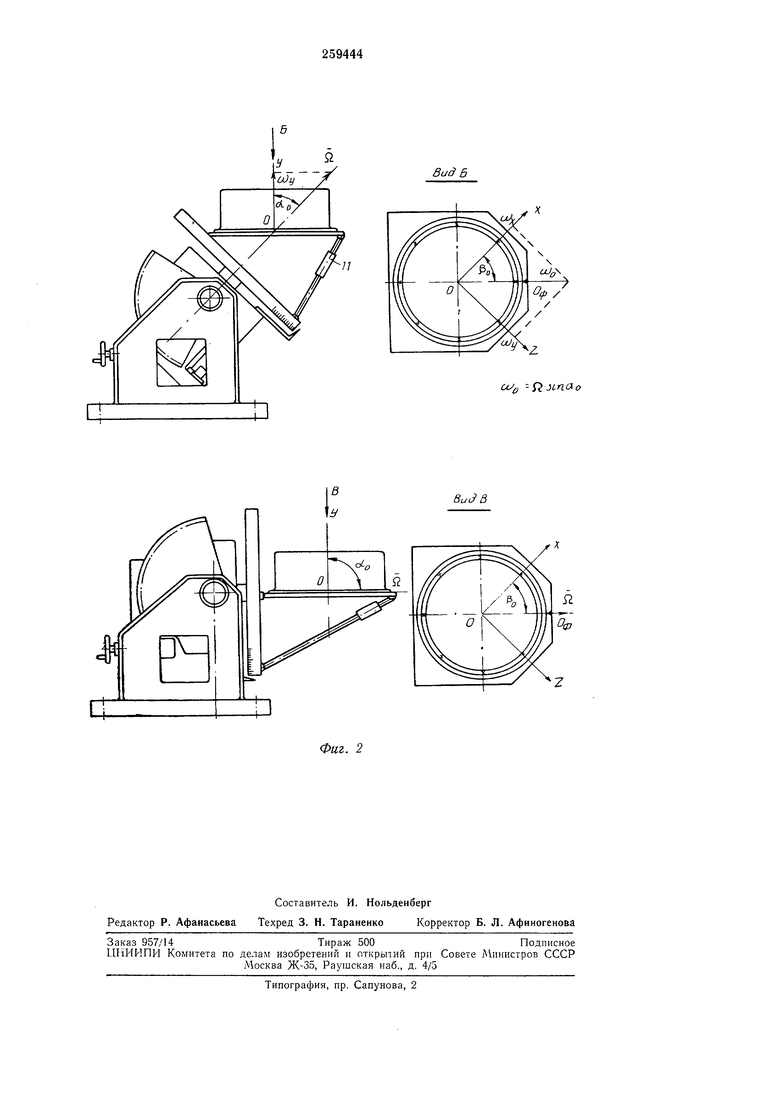
На фиг. 1 показан общяй вид предлагаемого стенда; на фиг. 2 - ориентация осей системы координат.
собой основание / с двумя параллельными стойками 2, имеющи.ги два соосных подцапфенных отверстия. В корпусе при помощи полых цапф 3 устанавливают поворотный блок 4.
К раме поворотного блока крепится редуктор 5, на котором находится исполнительный двигатель 6 и датчик угловой скорости следящего привода 7.
Выходная шестерня редуктора входит в зацепление с оконечной шестерней платформы 8, которая представляет собой диск, насаженный на полую ось поворотного блока. На одну из цапф 3 насажен косозубый сектор 9, зацепляющийся с червяком ручного привода 10, установленного на одной из стоек корпуса. На платформе 8 крепится кронштейн 11, который с одной стороны имеет проушины с направляющими, входящими в пазы платформы 8. Кронщтейн // выполнен в виде 1;аркаса, в который вписан фланец 12; на нем устанавливают гироприбор 3.
Для моделирования углового движения объекта регулирования относительно трех осей ОХ, OY, OZ связанной системы координат необходимо:
1.Развернуть поворотный блок при помощи ручного привода 10 на фиксированный угол Uo относительно вертикали. 3. Развернуть фланец 12 с гнроприбором 13 в установочной плоскости на фиксированный угол РО относительно нулевой линии фланца 12. Тогда при подаче на вход следящего привода задающего воздействия, изменяющегося по любому заданному закону, по сям ОХ, OY, OZ гироприбора будут действовать возмущения, равные проекциям вектора угловой скорости Q (/) платформы 8 на соответствующие оси: (О. со(0,ЛО (t - Q (/) sin ас cos Po Wy (0 Q (t cos GO w (t Q (/) sin «0 sin PO(1) Пределы изменения углов oo и PQ: 0° ao : 90 0° Po 360° Для определения величин углов ао и Ро и закона изменения О, (t) необходимо задать возмущения, действующие на объект управления осям X, Y, Z 0жэад(0 (О МузадСО AV (О С0,зад(0 К4 (t} И изменяющиеся но единому закону f (t). Тогда полагая, что ю подставляем в выражения (3) значения из формул (I) и {2)Kif(t) - Q(0sina,cos % /r,f(0 : (0cosa„ A,f(/)Q(Osina,sin3o Рещая систему уравнений (4), найдем: 3, arc tg 7., :: arc tg KZ sin So K, Движение относительно любых двух осей или относительно любой одной оси получим как частный из общего случая (1). Предмет изобретения Динамический моделирующий стенд для испытания гироскопических приборов, содержащий корпус и размещенные в нем платформу с управляемой осью для установки испытуемых гироскопических приборов, редуктор и элементы следящего привода, отличающийся тем, ч го, с целью расщирения возможностей моделирования углового движения объекта управления и увеличения диапазона малых усгановивщихся угловых скоростей, элементы следящего привода с редуктором и платформа с управляемой осью размещены в общем блоке, который снабжен приводом для его разворота на заданный угол вокруг горизонтальной оси, перпендикулярной управляемой оси платформы, на которой установлен кронщтейн с регулируемым упором, снабженный фланцем для крепления испытуемого гироскопического прибора, разворачивающимся в своей плоскости на заданный УГОЛ.
Вид В
0 -fiJinao
Фиг. 2
BuJ В
