Известен способ измерения азимутов скважин с использованием трехстепенного гироскопа, в котором скорость отклонения оси вращения гиромотора измеряют непосредственно перед спуском в скважину, а затем с помощью моментного датчика компенсируют отклонение главной оси гироскопа от заданного направления. При этом точность стабилизации измерительной части снаряда остается низкой, так как условия работы в скважине меняются.
Предлагаемый способ отличается тем, что для повыщения точности измерения спуск и подъем снаряда осуществляют с остановками, во время которых измеряют скорость поворота главной оси гироскопа относительно корпуса снаряда.
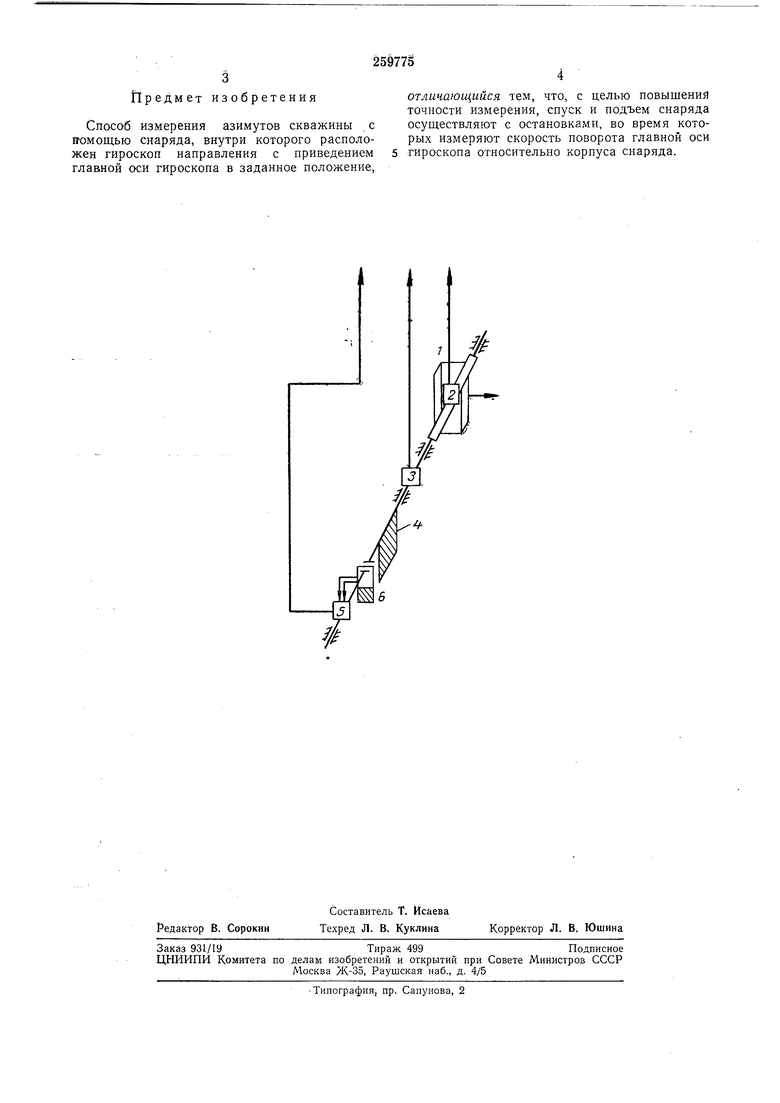
На чертеже изображеиа электрокинематическая схема снаряда по предлагаемому способу.
Снаряд состоит из гироскопа 1 направления, с внутренней рамкой которого связан датчик углов 2. Корпус датчика углов 3 укреплен на оси апсидального маятника 4 (ось подвеса этого маятника практически параллельна оси скважины), а подвижная часть, например щетка потенциометра, - на внешней рамке гироскопа.
горизонтальна и перпендикулярна ап-сидальной плоскости.
После ориентирования гироскопа 1 на дневной поверхности осуществляют его в скважину. По проществии заданного момента времени Ат производят остановку снаряда и снятие сигналов т, р и в (ф - угол поворота внутренней рамки гироскопа, р - угол поворота внешней рамки, в - зенитный угол) с датчиков углов 2, 3, 5. Спустя некоторое время Д производят вторично снятие отсчетов с датчиков , после чего снова продолжают спуск снаряда.
Разность показаний датчиков 2 и 3 делят на Д и тем самым вычисляют скорости г|) и р видимого ухода гироскопа относительно его внешней и внутренней осей подвеса.
Для перехода к скорости у ухода оси ротора в азимуте выполняют вычисления по формуле у фсоз6-psimj)sin0, затем вычисляют величину -у (t - отсчитывается от момента предыдущей остановки).
По прошествии момента времени 2 Дт снова снаряд останавливают и т. д.
Предмет изобретения
Способ измерения азимутов скважины с помощью снаряда, внутри которого расположен гироскоп направления с приведением главной оси гироскопа в заданное положение,
отличающийся тем, что, с целью повышений точности измерения, спуск и подъем снаряда осуществляют с остановками, во время которых измеряют скорость поворота главной оси гироскопа относительно корпуса снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения азимута наклонной скважины | 1977 |
|
SU663826A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| Инклинометр | 1990 |
|
SU1788224A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТОВ СКВАЖИН | 1970 |
|
SU258992A1 |
| ГИРОИНКЛИНОМЕТР ДЛЯ ПРОВЕДЕНИЯ ИНКЛИНОМЕТРИЧЕСКОЙ СЪЕМКИ И СПОСОБ ЕЁ ПРОВЕДЕНИЯ | 2024 |
|
RU2829726C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |