Известны устройства для ограничения перегрузки подъемных механизмов, например экскаваторов, работающих в режиме стопорных нагружений, содержащие расположенный между двигателем и редуктором постоянно замкнутый тормоз с колодками, связанный с ними пружино-рычажный механизм, включающий рычаг, воспринимающий усилие от редуктора.
Предлагаемое устройство отличается от известных тем, что между двигателем и редуктором помещена планетарная муфта, взаимодействующей с охватывающими ее шкив-эпипикл тормозными колодками, срабатывающими под воздействием рычажно-поужинного механизма, связанного с редукто,ом у его входного вала, опирающимся на пружинный демпфер двойного действия. Это повыщаег надежность срабатывания устройства при достижении предельно допустимой величины перегрузки механизма.
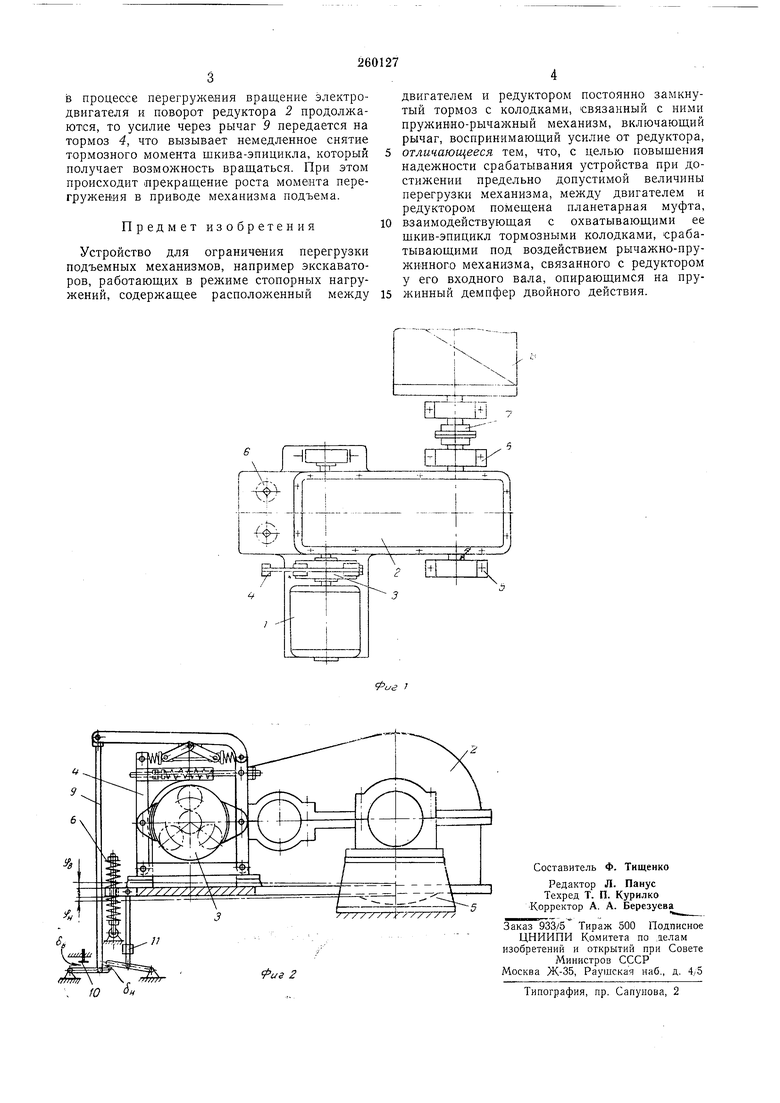
На фиг. 1 схематически изображен привод механизма подъема с описываемым устройством; на фиг. 2-схема связи подпружиненного редуктора с тормозными колодками, воздействующими на шкив-эпицикл планетарной муфты.
двигателем своим концом у выходного вала опирается «а подшипники 5, а другим концом у входного вала редуктора - на пружинный демфер 6 двойного действия. Через зубчатую муфту 7 редуктор связан с барабаном 8 механизма подъема машины. Связь редуктора 2 с тормозом 4 осуществляется через рычал нопружинный механизм, который посредством рычага 9, болта 10 и стяжной гайки 11 регулирует величину зазоров Sj, и 8„, ограничивающих колебания пружинного демпфера 6.
Работу устройства следует рассматривать в двух этапах.
Первый этап - нормальная работа, когда
крутящий момент от электродвигателя / через центральную шестерню, планетарные колеса и водило планетарной муфты 3 передается на входной вал редуктора я далее - к барабану S механизма подъема. Здесь
шкив-эпицикл планетарной муфты намертво зажат колодками тормоза 4, а редуктор 2 совершает колебания на пружинах демпфера 5 в пределах зазоров о„ и 5.
Второй этап-режим стопорных нагрул ений,
когда момент перегружения, возникающий на барабане S, вызывает поворот редуктора 2 на максимально допустимый угол фв или -фн (в зависимости от направления вращения электродвигателя), что влечет полную выборв процессе перегружения вращение электродвигателя и поворот редуктора 2 продолжаются, то усилие через рычаг 9 передается на тормоз 4, что вызывает немедЛвнное снятие тормозного момента шкива-эпицикла, который получает возможность вращаться. При этом происходит прекращение роста момента перегружения в приводе механизма подъема.
Предмет изобретения
Устройство для ограничения перегрузки подъемных механизмов, например экскаваторов, работающих в режиме стопорных нагружений, содержащее расположенный между
двигателем и редуктором постоянно замкнутый тормоз с колодками, связанный с ними пружинно-рычажный механизм, включающий рычаг, воспринимающий усилие от редуктора,
отличающееся тем, что, с целью повыщеиия надежности срабатывания устройства при достижении предельно допустимой величины перегрузки механизма, между двигателем и редуктором помещена планетарная муфта,
взаимодействующая с охватывающими ее шкив-эпицикл тормозными колодками, срабатывающими под воздействием рычажно-пружинного механизма, связанного с редуктором у его входного вала, опирающимся на пружинный демпфер двойного действия.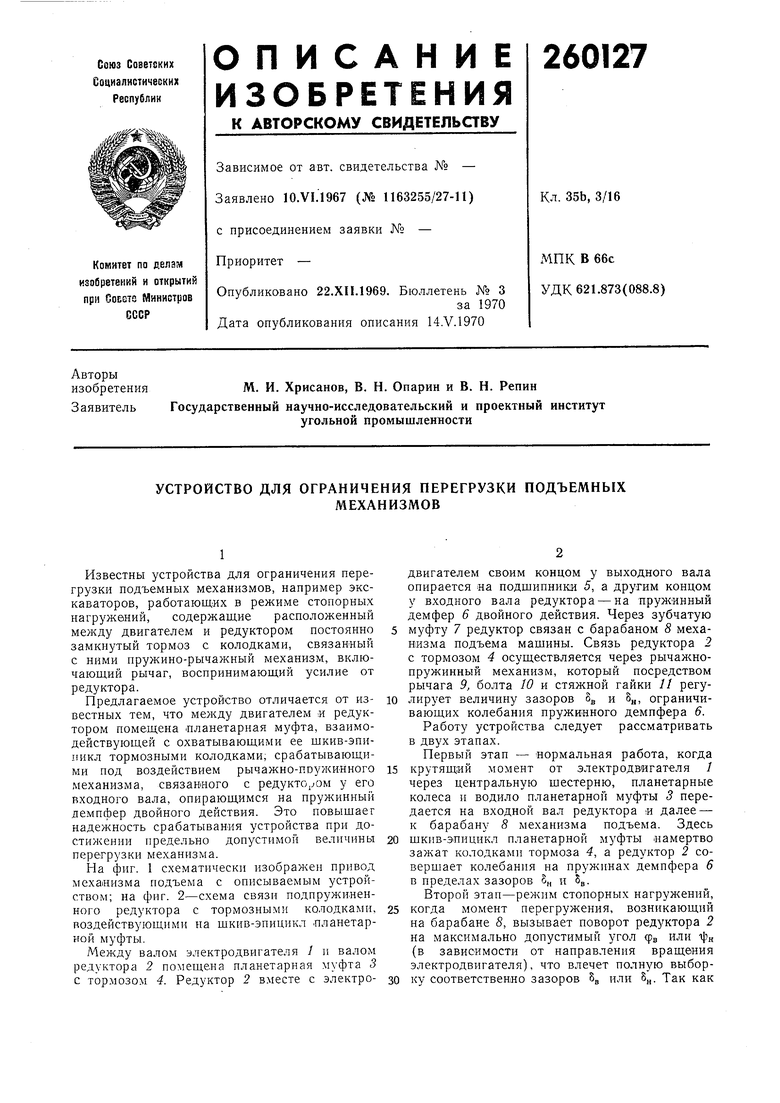
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничительное устройство механизма подъема кранов, обслуживающих затворы плотин гидросооружений | 1958 |
|
SU125015A1 |
| УСТРОЙСТВО для ЗАЩИТЫ РАБОЧИХ ОРГАНОВ ЗЕМЛЕРОЙНЫХ МАШИН ОТ ПЕРЕГРУЗКИ | 1969 |
|
SU258134A1 |
| Механизм подъема мостового крана | 1979 |
|
SU800109A1 |
| ДВУХБАРАБАННАЯ ЛЕБЕДКА | 1967 |
|
SU205251A1 |
| Судовое спуско-подъемное устройство для плавсредств | 1983 |
|
SU1150147A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для защиты рабочих органов машин от перегрузок | 1989 |
|
SU1767096A1 |
| ЭКСКАВАТОР | 2011 |
|
RU2481439C2 |
| Устройство для регулирования скорости вращения вала дозатора | 1983 |
|
SU1158986A1 |
| Поворотный механизм платформы экскаватора | 1981 |
|
SU1035150A1 |
