Известен грузолоиъемный кран для замены бата|рей шахтных электровозов, включающий ходовую тележку с несущей горизонтальной рамой, на (Которой расположена грузовая тележка с грузоподъемщыми органами, и механизмом перемещения.
Однако этот кран может быть устадовлен только в шахтных зарядных камерах специального сечения и не ,в1писы;вает1ся в зарядные камеры типового арочного сечения с разборной металлической крапью. Кроме того, при деформации выработки от горного давления noKpaiHCiBbie пути искривляются и даже в специальных выработках использование крана становится невозможным без постоянного перекрепления камеры.
Предлагаемый грузоподъемный кран отличается от известного тем, что опорная рама ходовой тележки выполнена U-обрааной формы, между верхними концами стоек которой раюположена горизонтальная рама, а сами стойки выполнены телескопическими, на выдвижных звеньях которых установлены горизонтальные ролики, опирающиеся на верхний направляющий рельс. Это обеопечивает работу крана в камерах, подверженных деформациям от горного давления.
ные обоймы, образующие полиспасты с тяговыми канатами.
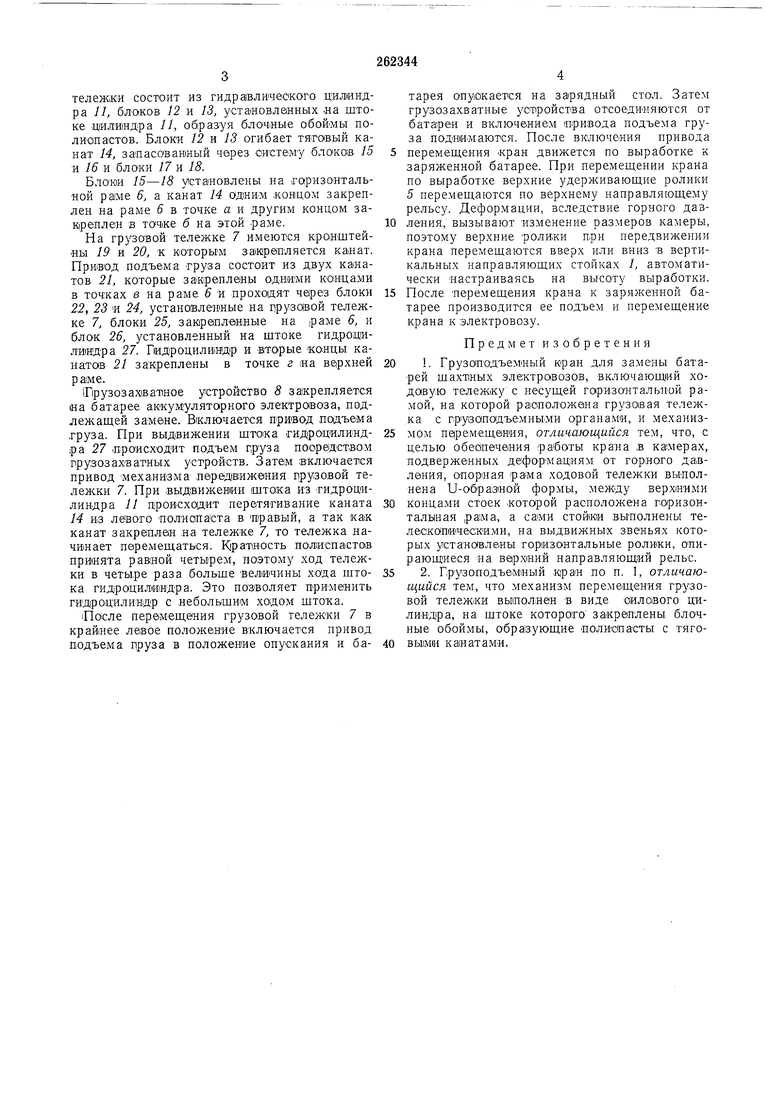
На фиг. 1 изображен описываемый кран, вид сбоку; на фиг. 2 - то же, вид опереди;
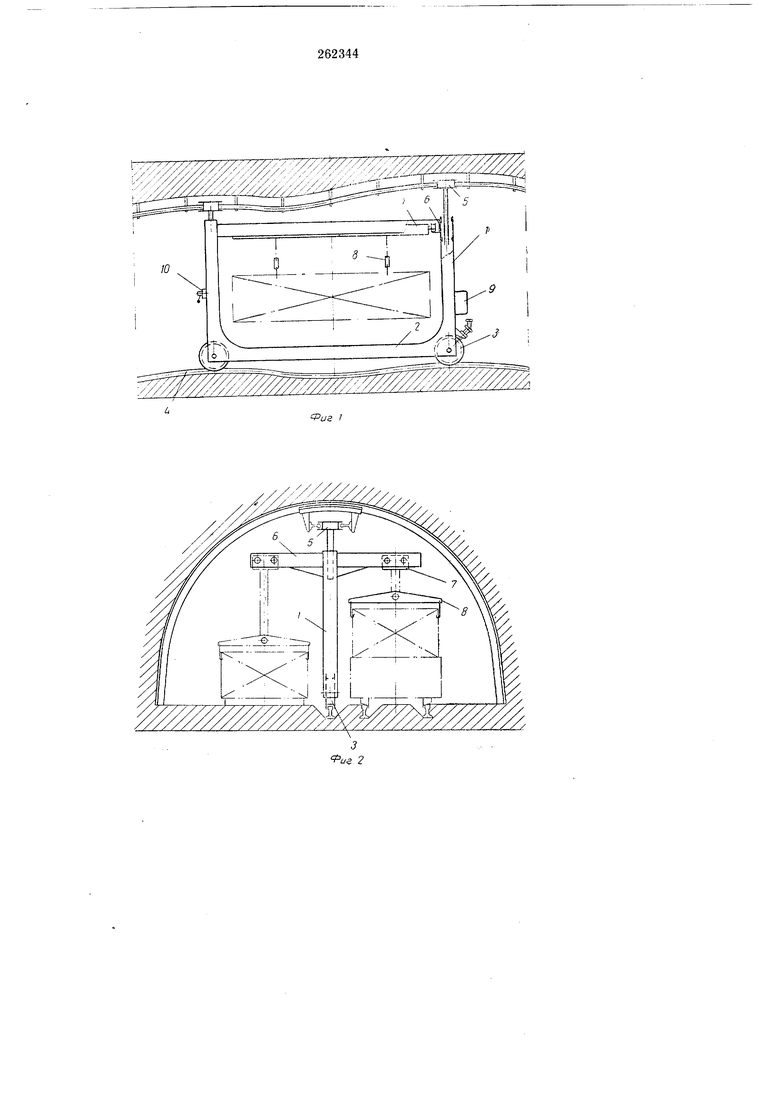
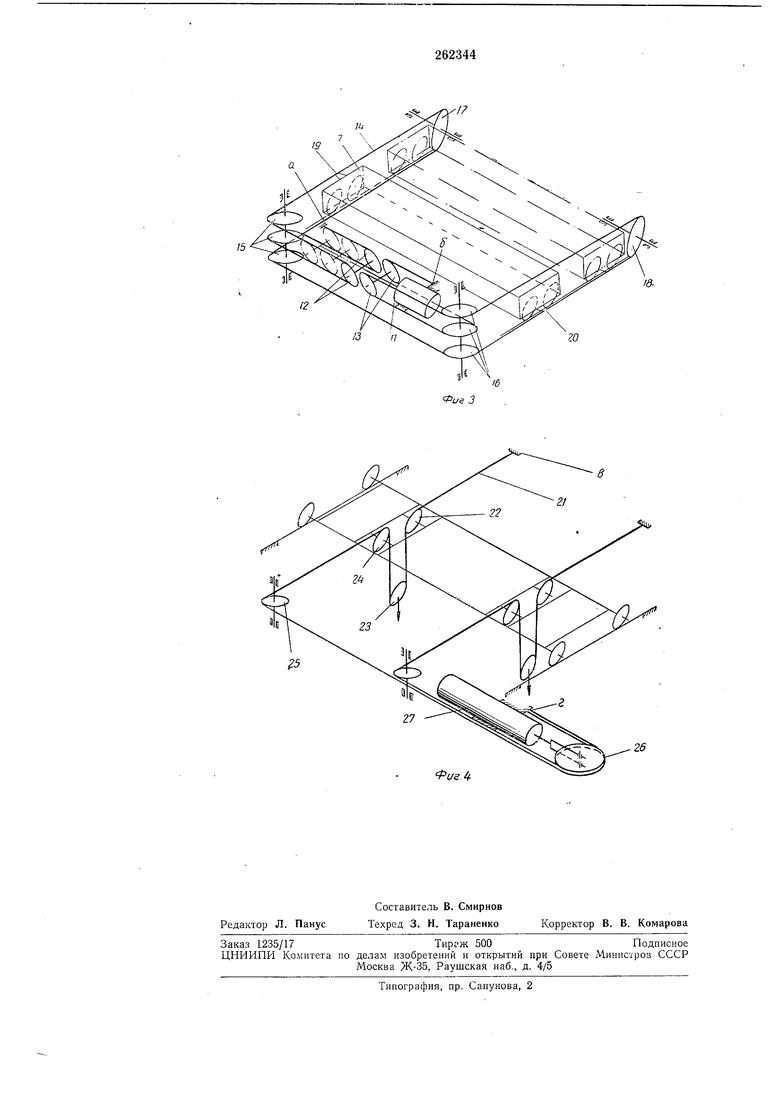
па фиг. 3 - Схема привода передвижения грузовой тележки; на фиг. 4 - схема привода подъема груза.
Кран состоит из опорной рамы, вылол.ненной из двух вертикальных стоек 1, связанных
снизу балкой 2. Опррная рама- имеет снйзу два ходовых колеса 5, на которых кран перемещается по одному нижнему рельсу 4, проложенному но почве выработки. Для удерл ания крана в вертикальном положении на
опорной раме установлены в вертикальных направляющих два верхних горизонтальных удерживающих ролика 5. Ролики 5 своими ребордами схватывают направляющие рельсы и благодаря свободному перемещению осей
роликов в .вертикальных направляющих могут перемещаться вверх и вниз. Сверху на опорной раме закреплена горизонтальная рама 6. По раме 6 перемещается грузовая тележка 7 с грузозахватным устройством 8. В одной из
продольных балок рамы установлены привод перемещения грузовой тележки и привод подъема груза. Питание всех приводов осуществляется от маслостанции 9. Управление работой приводов производится с пульта 10
тележки состоит из гидравли-чеокого цилиндра 11, блоков 12 и 13, установленных .на штоке цилиндра 11, об1разуя блочные обо&мы полиопастов. Блоки 12 и 13 огибает тяговый канат 14, заоасованиый через ОИстему блоков 15 и 16 и блоки 17 и 18.
Блоки 15-18 установлены на горизоитальной paiMC 6, а канат 14 концом закреплен на раме 6 в точке а и другим концом заК реплен в точке б на этой раме.
На грузовой тележке 7 имеются кронштейны 9 и 20, к которЫМ зак1репляется канат. Привод подъема груза состоит из двух канатов 21, которые закреплены одними концами в точках в на раме 6 и проходят через блоки 22, 23 и 24, установленные на грузовой тележке 7, блоки 25, зак1ре плвн:ные на раме 6, и блок 26, установленный на штоке гидроцилимдра 27. Гидроцилиядр и вторые концы канатов 21 закреплены в точке г на ве1рхцей раме.
1Г|рузозах1вапное устройство 8 закрепляется еа батарее аккумуляторного элекТр01ВОза, цодлежащей замене. Включается привод подъема груза. При выдвижении штока гидроцилиндра 27 происходит подъем груза посредством грузозахватных устройств. Затем включается привод механизма .передвижения грузовой тележки 7. При выдвижении штока из сидроцилиндра 11 происходит перетягивание каната 14 из левого иолиопаста в правый, а так как канат закреплен на тележке 7, то тележка начинает neipвмещаться. К|ратно:сть полиспастов примята равной четырем, поэтому ход тележки в четыре раза больше величины хода штока гидроцилиидра. Это позволяет применить гидроцилиндр с небольшим ходом штока.
После перемещения грузовой тележки 7 в крайнее левое положение включается привод подъема г|руза в положение опускания и батарея опускается на зарядный стол. Затем грузозахватные устройства отсоединяются от батареи и включением привода подъема груза поднимаются. После включения привода перемещения кран движется по выработке к заряженной батарее. При перемещении крана по выработке верхние удерживающие ролики 5 перемещаются по верхнему направляющему рельсу. Деформации, вследствие горного дазления, вызывают изменение размеров камеры, поэтому верхние ролики при передвижении крана перемещаются вверх или вниз в вертикальных направляющих стойках /, автоматически настраиваясь на высоту выработки.
После перемещения крана к заряженной батарее производится ее подъем и перемещение крана к электровозу.
Предмет изобретения
. Грузоподъемный кран для замены батарей щахт1ных электровозов, включающий ходовую тележку с несущей горизонтальной рамой, на которой раюположана грузовая тележка с грузаподъемнЫМи органами, и механизмом пе)ремещбния, отличающийся тем, что, с целью обеспечения работы крана в камерах, подверженных дефор мациям от горного давления, опорная рама ходовой тележки вьшолнена U-образной формы, между верхними
концами стоек которой расположена горизонталыная рама, а сами стойки выполнены телескапическими, на выдвижных звеньях которых устанавлены горизонтальные ролики, опирающиеся на верхний направляющий рельс.
2. Грузоподъемный кран по п. 1, отличающийся тем, что механизм перемещения грузовой тележки выполнен в виде оилоеого цилиндра, на щтоке которого закреплены блочные обоймы, образующие полиспасты с тяговыми канатами.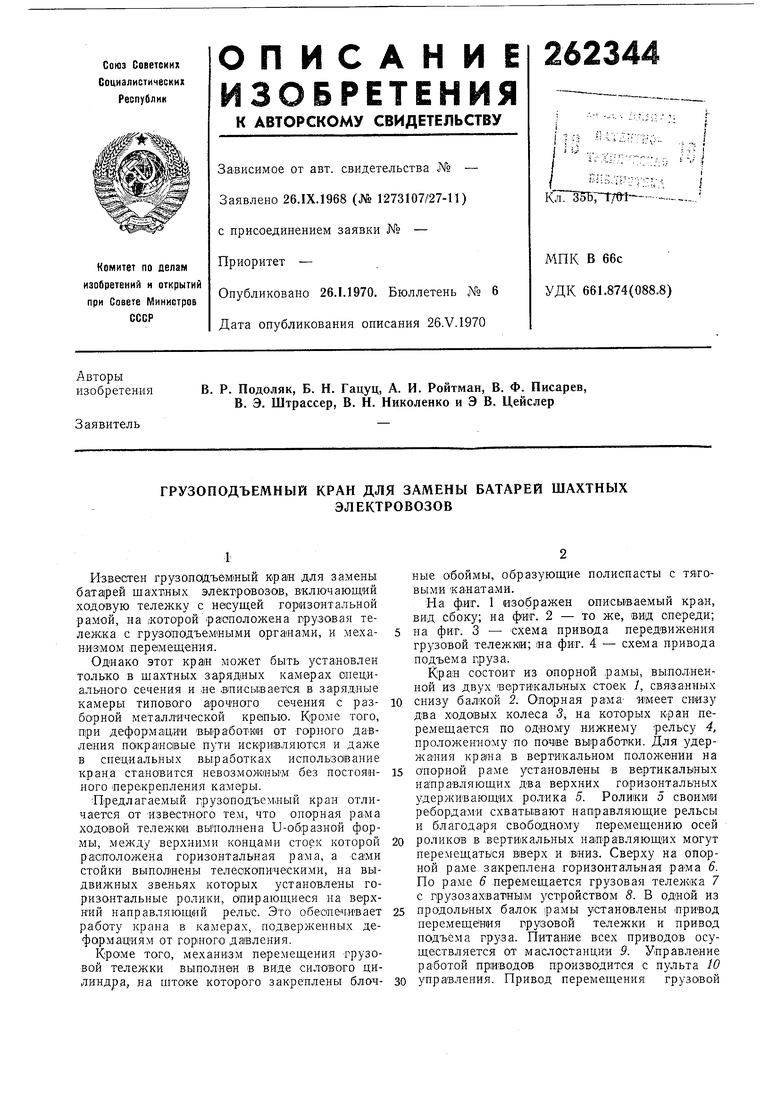
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| Грузовая подвеска контейнерного крана | 1981 |
|
SU998304A1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| Мостовой кран для подъема грузов | 1979 |
|
SU787344A1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Шахтный кран | 1977 |
|
SU693023A1 |
9
12
25
дго
27
26
ФlJsf
