Данное предложение относится к автоматике, а именно - к технике автоматического регулирования различных технологических процессов, может быть использовано при создании систем оптимизации объектов теплоэнергетики, химии, черной и цветной металлургии и др.
Известны экстремальные регуляторы с широтно-импульсным модулирующим воздействием, содержащие развязывающий усилитель со входной дифференцирующей цепью и исполнительное устройство.
Предложенное устройство отличается от известных тем, что в нем между выходом развязывающего усилителя и входом исполнительного устройства установлены два параллельно включенных пиковых детектора, диоды которых включены разнополярно.
Это позволяет упростить регулятор и повысить точность поддержания экстремума.
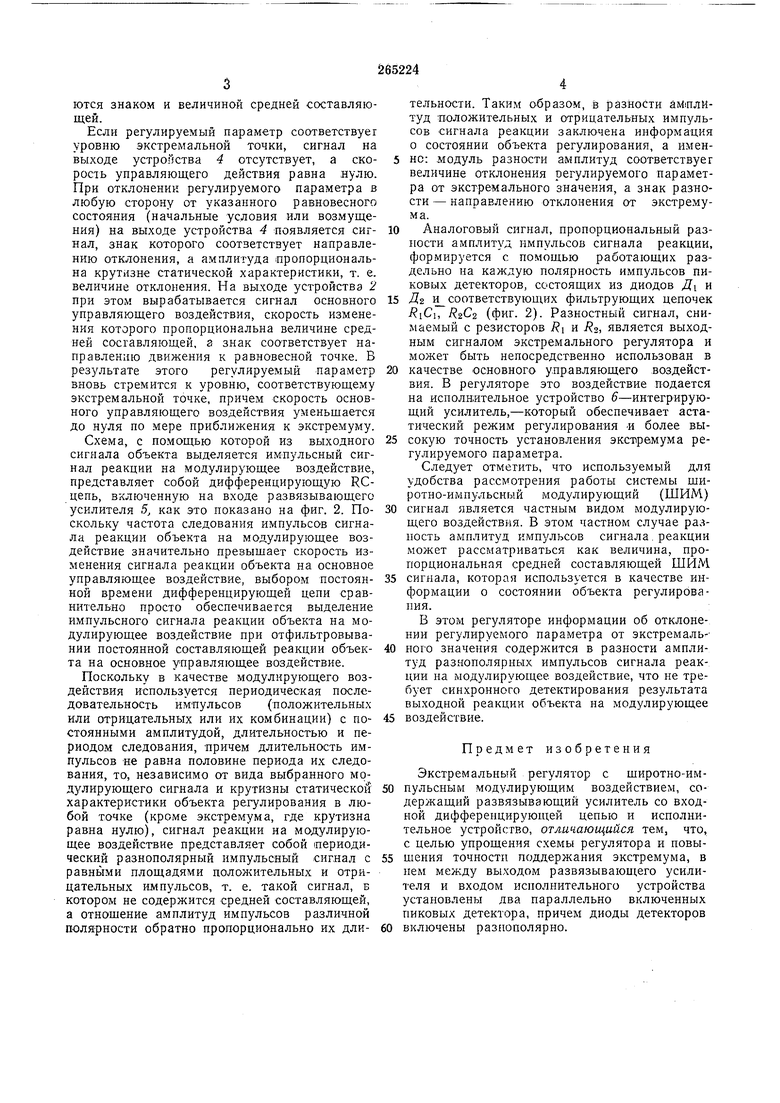
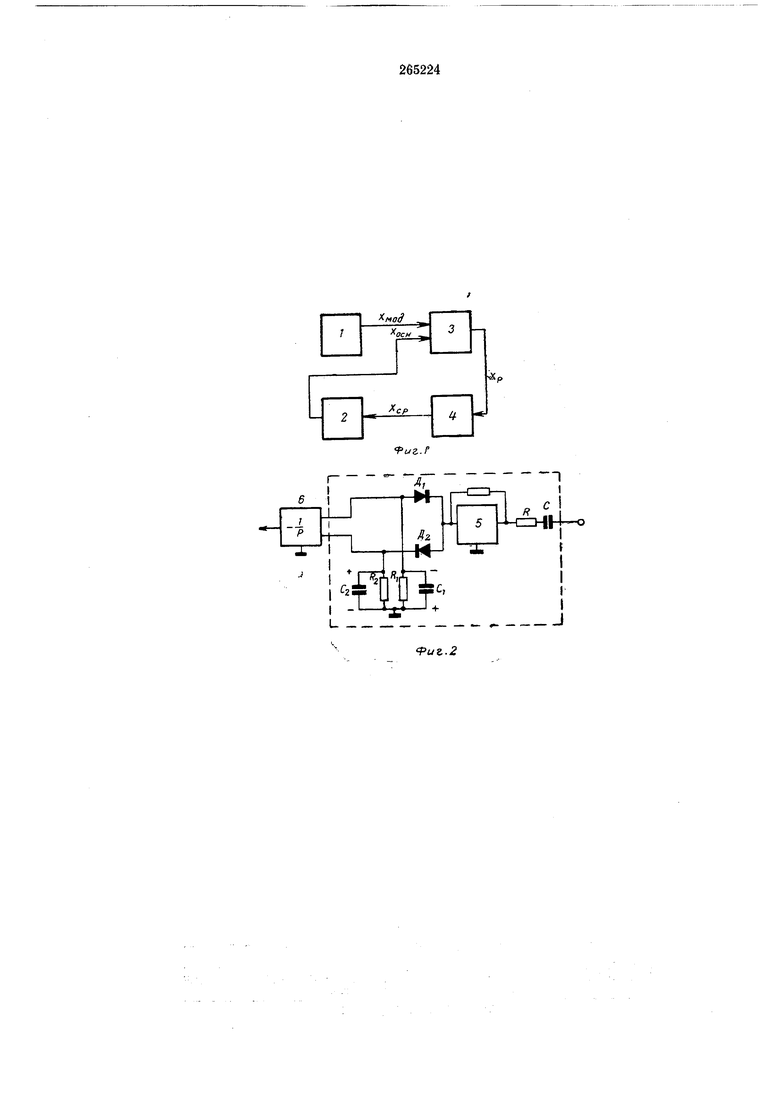
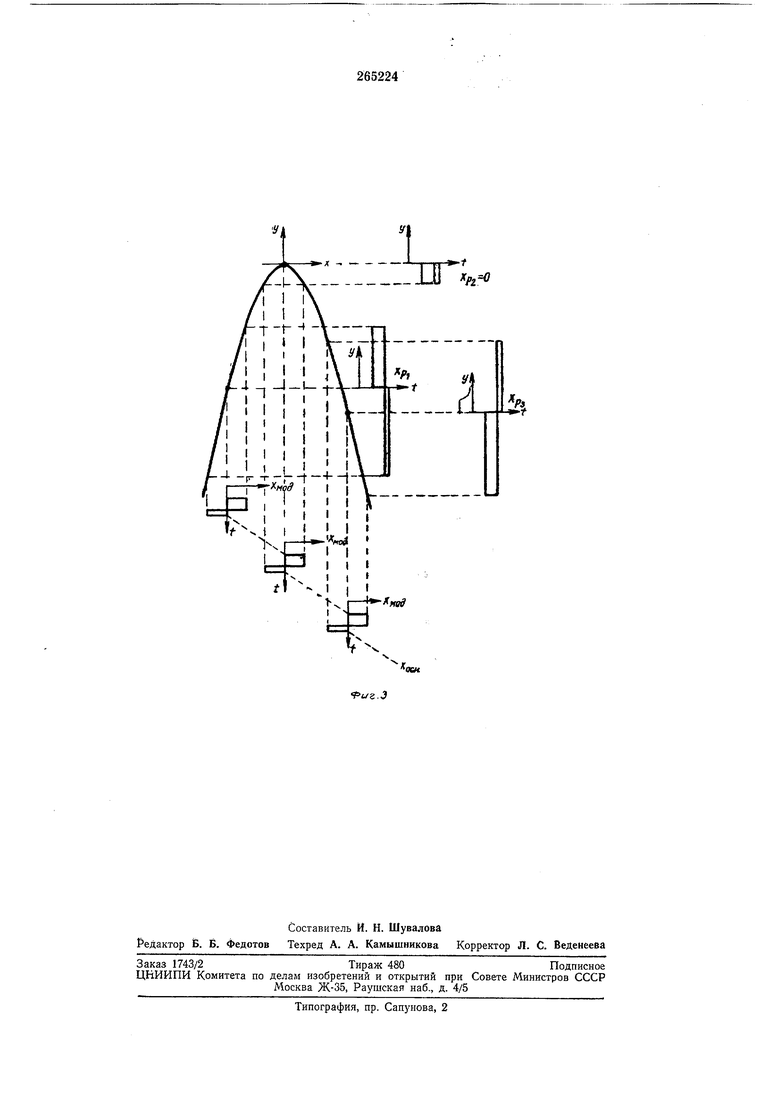
На фиг. 1 изображена структурная схема экстремальной системы; на фиг. 2 - схема экстремального регулятора; на фиг. 3 поясняется принцип действия регулятора.
Экстремальная система содержит источник / модулирующего сигнала „од, исполнительное устройство 2, обеспечивающее воздействие Аосн, объект регулирования 3 и устройство 4, выделяющее срелТнюю составляющую
сигнала реакции объекта на модулирующее воздействие.
Модулирующий сигнал истс-чника 1 с постоянной сквалсностью, не равной 0,5, сложенный с основным управляющим сигналом исполнительного устройства 2, воздействует на управляемый вход объекта регулирования 3 имеющего экстремальную характеристику.
Объект, реагируя на модулирующее воздействие, дает на выходе соответствующий сигнал реакции Хр в виде переменной составляющей, амплитуда которой определяется крутизной статической характеристики в данной точке, а
скважность - знаком крутизны статической характеристики объекта. Величина средней составляющей , выделенной устройством 4 из сигнала реакции, определяется выбранными начальными параметрами модулирующего
сигнала - амплитудой и скважностью, а также крутизной статической характеристики объекта в данной точке. Знак средней составляющей соответствует знаку крутизны статической характеристики. Таким образом, сигнал средней составляющей несет информацию о величине и направлении отклонения от экстремума. Сигнал основного управляющего воздействия формируется исполнительным устройством 2 по интегральному закону, приче.м 3 ются знаком и величиной средней составляющей. Если регулируемый параметр соответствует уровню экстремальной точки, сигнал на выходе устройства 4 отсутствует, а ско-5 рость управляющего действия равна .нулю. При отклонении регулируемого параметра в любую сторону от указанного равновесного состояния (начальные условия или возмущения) на выходе устройства 4 появляется сиг-10 нал, знак которого соответствует направлекию отклонения, а амплитуда оропорциональна крутизне статической характеристики, т. е. величине отклонения. На выходе устройства 2 при этом вырабатывается сигнал основного15 управляющего воздействия, скорость изменения которого пропорциональна величине средней составляющей, а знак соответствует направлению движения к равновесной точке. Б результате этого регулируемый параметр20 вновь стремится к уровню, соответствующему экстремальной точке, причем скорость основного управляющего воздействия уменьшается до нуля по мере приближения к экстремуму. Схема, с помощью которой из выходного25 сигнала объекта выделяется импульсный сигнал реакции на модулирующее воздействие. представляет собой дифференцирующую RCцепь, включенную на входе развязывающего усилителя 5, как это показано на фиг. 2. По-30 скольку частота следования импульсов сигнала реакции объекта на модулирующее воздействие значительно превышает скорость изменения сигнала реакции объекта на основное управляющее воздействие, выбором постояв-35 ной времени дифференцирующей цепи сравнительно просто обеспечивается выделение импульсного сигнала реакции объекта на модулирующее воздействие при отфильтровываНИИ постоянной составляющей реакции объек-40 та на основное управляющее воздействие. Поскольку в качестве модулирующего воздействия используется периодическая последовательность импульсов (положительных или отрицательных или их комбинации) с по-45 стоянными амплитудой, длительностью и периодом следования, причем длительность импульсов не равна половине периода их следования, то, независимо от вида выбранного модулирующего сигнала и крутизны статической50 характеристики объекта регулирования в любой точке (кроме экстремума, где крутизна равна нулю), сигнал реакции на модулирующее воздействие представляет собой периодический разнополярный импульсный сигнал с55 равньши площадями положительных и отрицательных импульсов, т. е. такой сигнал, Б котором не содержится средней составляющей, а отношение амплитуд импульсов различной полярности обратно пропорционально их дли-60 4 тельности. Таким образом, в разности амшлитуд положительных и отрицательных импульсов сигнала реакции заключена информация о состоянии объекта регулирования, а именно: модуль разности амплитуд соответствует величине отклонения регулируемого параметра от экстремального значения, а знак разности - направлению отклонения от экстремума. Аналоговый сигнал, пропорциональный разности амплитуд импульсов сигнала реакции, формируется с помощью работающих раздельно на каждую полярность импульсов пиковых детекторов, состоящих из диодов Д и uz и соответствующих фильтрующих цепочек iCi, (фиг. 2). Разностный сигнал, снимаемый с резисторов R и R, является выходным сигналом экстремального регулятора и может быть непосредственно использо:ван в качестве основного управляющего .воздействия. В регуляторе это воздействие подается на исполнительное устройство 6-интегрирующий усилитель,-который обеспечивает астатический режим регулирования « более высокую точность установления экстремума регулируемого параметра. Следует отметить, что используемый для удобства рассмотрения работы системы широтно-имцульсный модулирующий (ШИМ) сигнал является частным видом модулирующего воздействия. В этом частном случае разность амплитуд импульсов сигнала, реакции может рассматриваться как величина, протгарциональная средней составляющей ШИМ сигнала, которая используется в качестве информации о состоянии объекта регулировапня. В этом регуляторе информации об отклонении регулируемого параметра от экстремаль-ного значения содержится в разности амплитуд разнополярных импульсов сигнала реакции на модулирующее воздействие, что не требует синхронного детектирования результата выходной реакции объекта на модулирующее воздействие, Предмет изобретения Экстремальный регулятор с широтно-импульсным модулирующим воздействием, содержащий развязывающий усилитель со входной дифференцирующей цепью и исполнительное устройство, отличающийся тем, что, с целью упрощения схемы регулятора и повышения точности поддержания экстремума, в нем между выходом развязывающего усилителя и входом исполнительного устройства установлены два параллельно включенных пиковых детектора, причем диоды детекторов включены разнополярно.
k.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1965 |
|
SU174249A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| СПОСОБ ДИСКРЕТНОГО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1991 |
|
RU2015522C1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Система экстремального регулирования | 1977 |
|
SU686013A1 |
| А. И. ТЕЛИС- ^ Лj^'^'•--•:;; 'Г^" ;,^Украинский научно-исследовательский институт станков" и инструментов | 1967 |
|
SU200923A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОКОЛЕБАТЕЛЬНОЙ СИСТЕМОЙ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ | 1969 |
|
SU251054A1 |
| Система управления | 1981 |
|
SU996995A1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР ДУГОВОЙ СТАЛЕПЛАВИЛЬНОЙ ПЕЧИ | 1965 |
|
SU173348A1 |
, %
г
1
-f
naff
