1
Предложенное устройство относится к области управления циклическими и непрерывными технологическими процессами.
Известны устройства для автоматической оптимизации технологических процессов, содержащие датчики внешних возмущений, параметров и масщтабных коэффициентов, системы стабилизации параметров и подключенные к ним блоки управления с множителями и датчиками пробных колебаний, а также многомерный коррелятор и блок определения локальной разности.
Недостатком таких устройств являются сравнительно большие затраты на один регулирующий орган при достаточно полном оснащении технологического процесса датчиками и невозможность одновременного управления несколькими технологическими процессами.
Цель изобретения - уменьшение затрат на один регулирующий орган ири том же конечном эффекте, что н в известном устройстве, в несколько десятков раз и расщирение области применения.
Эта цель достигается тем, что в устройстве установлены соединенный с выходом блока определения локальной разности вычислитель удаленности от экстремума, связанный со входом многомерного коррелятора, а также блок обегания, через который вход многомерного коррелятора подключен к датчикам
внешних воздействий, его выход - к множителям блоков управления, датчики пробных колебаний- ко входу вычислителя удаления от экстремума, а датчики параметров и масщтабных коэффициентов - ко входу блока определения локальной разности.
Средства реализации блоков коррелирования, определения локальной разности должны
быть быстродействующими (так как обслуживают несколько технологических процессов), а блок управления должен быть таким, как средства реализации в системах стабилизации (для уменьшения эксплуатационных затрат).
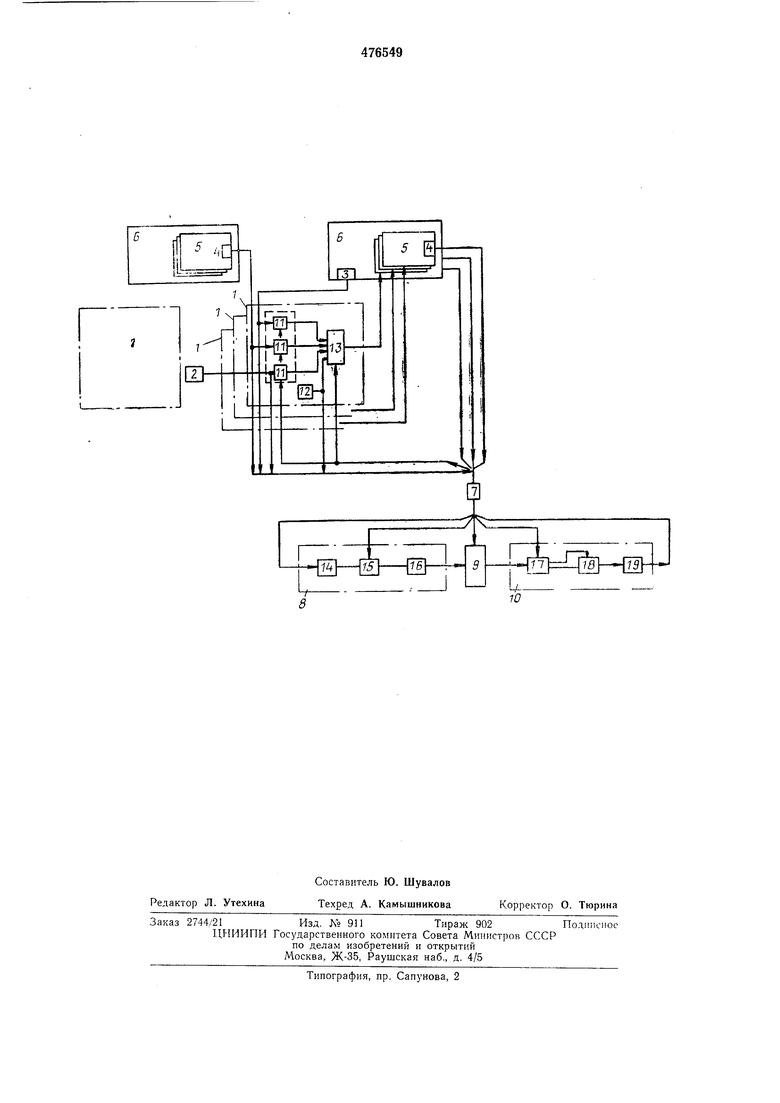
На чертеже изображена принципиальная схема устройства.
Оно содержит блоки управления 1, датчики внешних возмущений 2, датчики масштабных коэффициентов 3 и датчики параметров 4 систем стабилизации 5, параметров технологического объекта 6. Кроме того, устройство содержит блок 7 обегания с каналами связи, блок 8 определения локальной разности, вычислитель 9 удаления от экстремума, многомерный коррелятор 10 для вычисления поправок к коэффициентам усиления блока управления.
Блок 1 состоит из множителей 11, которые умножают внешние возмущения и сигналы
масщтабов и параметров на свои постоянные
коэффиидеанты. датчика 12 пробных колебаний и сумматора 13 с постоянной составляющей.
Блок 8 состоит из линии задержки 14 входного сигнала, модуля 15 умножения сдвинутого сигнала из линии задержки 14 на коэффициент и сумматора 16.
Блок 10 состоит из фильтров 17, выделяющих переменные составляющие в сигналах из блока 9 и каждого внешнего возмущения с датчиков 2, множителя 18 и интегратора 19. Работу устройства рассмотрим на двух интервалах времени: между проверками коэффициентов блока управления (порядка 2- 3 лет) и на интервале самой проверки и подстройки коэффициентов (порядка недели). При этом блоки 8-10 работают 10-15 мин для каждого из технологических процессов в цикле.
На интервале между проверками коэффициентов устройство работает следующим образом.
Внешние возмущения с датчиков 2 на данный технологический процесс (объект 6), косвенные сигналы (параметры с датчиков 4) из предшествующих объектов и масштабные коэффициенты с датчиков 3 поступают в множители 11, блока 1, где умножаются на постоянные коэффициенты и подаются в сумматор 13 с постоянной составляющей. Выход сумматора 13 является оптимальным заданием на системы стабилизации с управляемого объекта 6. Датчик 12 пробных колебаний отключен.
Блоки 1 имеются на каждый существенный регулирующий орган и каждый вырабатывает задание на соответствующие системы стабилизации 5 каждого объекта 6.
На интервале проверки и настройки коэффициентов устройство работает следующим образом.
Включается датчик 12 пробных колебаний. Блоки 1 функционируют так же, -как на интервале времени между проверками коэффициентов. С объекта 6 в канал связи блока обегания 7 поступают сигналы за некоторый интервал времени работы объекта: пробные колебания, экономически существенные параметры, масштабные коэффициенты и внешние воздействия. Блок 7 в процессе обегания подключается к каждому объекту и передает его информацию через канал связи в линию задержки 14 блока 8. Задержанные сигналы каждого объекта один за другим поступают в модуль 15, где сигнал умножается на соответствующий масштабный коэффициент. Произведение каждого сигнала поступает в сумматор 16 для суммирования всех произведений, полученных в модуле 15. Сумматор 16 вырабатывает сигнал «доход, который поступает в вычислитель 9 на умножение с пробными колебаниями, поступающими в него непосредственно из канала связи. Вычислитель 9 Вырабатывает сигнал удаленности от экстремума. Сигнал с выхода вычислителя
10 9 и все внешние возмущения поступают один за другим в фильтр 17 коррелятора 10, в котором из указанных сигналов выделяются переменные составляющие. Переменный сигнал удаленности от экстремума с выхода фильтра
15 17 подается в множитель 18, где умножается на каждую из переменных составляющих внешних возмущений, которые также подаются с выхода фильтра 17. Каждое произведение посылается в интегратор 19. На выходе
20 интегратора 19 получаются за определенный интервал времени работы объекта приращения к коэффициентам блока 1. Эти приращения по каналам связи через блок 7 поступают в множители И блока 1 в качестве поправок
25 к коэффициентам.
Приращения к постоянной составляющей в сумматоре 13 вычисляются аналогично.
Процесс осуществляется за несколько определенных интервалов времени, пока приращения к коэффициентам не станут практически равны нулю.
Предмет изобретения
5 Устройство для автоматической оптимизации технологических процессов, содержащее датчики внешних возмушений, параметров и масштабных коэффициентов, системы стабилизации параметров и подключенные к ним
0 блоки управления с множителями и датчиками пробных колебаний, а также блок определения локальной разности и многомерный коррелятор, отличающееся тем, что, с целью расширения области применения, в
5 нем установлены соединенный с выходом блока определения локальной разности вычислитель удаления от экстремума, связанный со входом многомерного коррелятора, а также блок обегания, через который вход многомерного коррелятора подключен к датчикам внешних воздействий, его выход - к множителям блоков управления, датчики пробных колебаний - ко входу вычислителя удаления от экстремума, а датчики параметров и масштабных коэффициентов - ко входу блока определения локальной разности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации частоты излучения лазера и стабилизированный по частоте излучения лазер | 2016 |
|
RU2634368C1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Система управления | 1981 |
|
SU996995A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Вычислитель угла атаки | 1982 |
|
SU1072069A1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |