Известны вакуум-захватные устройства, нредназначенные для подъема и транспортировки нлоскнх изделий, включающие вакуумколлектор, навешиваемый на крюк грузоподъемного механизма, вакуумный насос, закрепленные на коллекторе с помощью подпружиненных держателей присосные головки, сообщающиеся с коллектором через противоподсосные клапаны. Однако такие устройства не обеспечивают раздельного управления присосными головками, Сохранения вакуума в вакуум-коллекторе нри сообщении присосных головок с атмосферой, а также контроль срабатывания присосной головки.
Предлагаемое устройство отличается тем, что каждый противоподсосный клапан выполнен в виде соосно расположенных подпружиненных плунжеров, один из которых закреплен на эластичной диафрагме и соединен с рукояткой управления. Другой плунжер снабжен буртиком с эластичной прокладкой, перекрывающей отверстие, сообщающее полость присо.сной головки с вакуум-коллектором.
Это позволяет обеснечпть раздельное управление нрисосными головками и сохранить вакуум в вакуум-коллекторе при сообщении присосных головок с атмосферой.
создании вакуума в полости присосной головкн.
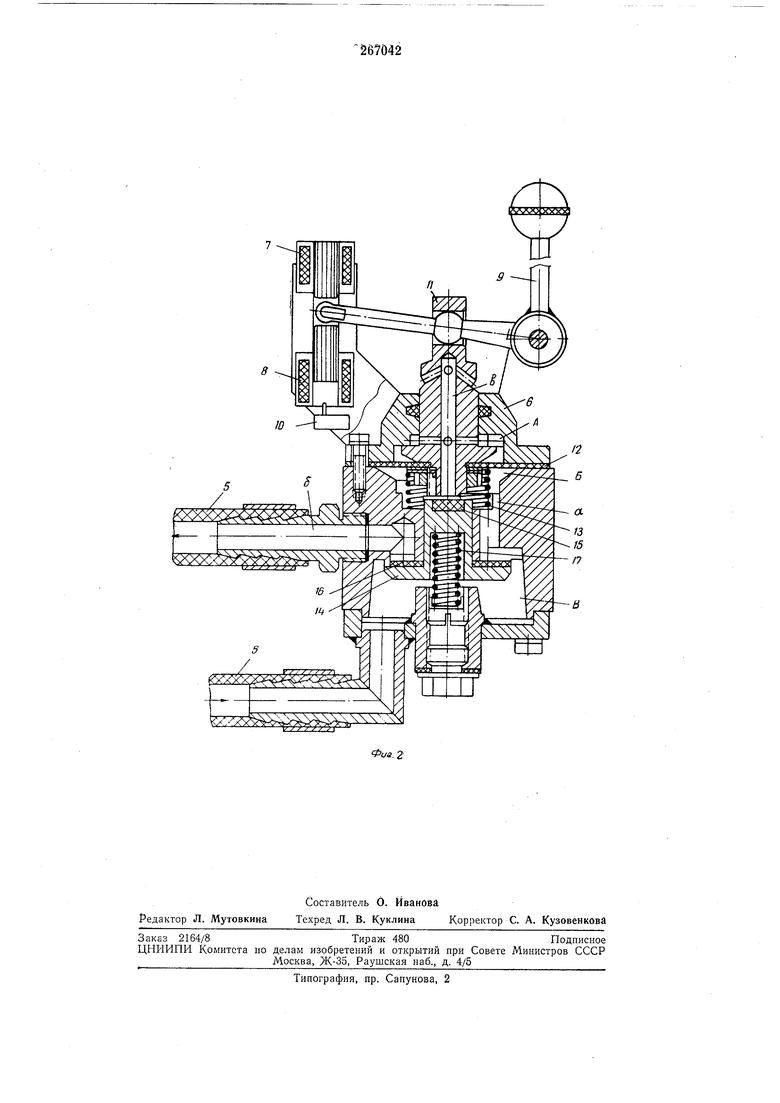
На фиг. 1 схематично показано вакуум-захватное устройство, общий вид; ла фиг. 2 -
противонодсосный клапан в разрезе.
Предлагаемое устройство включает вакуумколлектор 1, навещиваемый на крюк грузоподъемного механизма, на коллекторе закреплены присосные головки 2, вакуумный насос
5 и противоподсосные клапаны 4, сообщающиеся с вакуум-коллектором и полостями присосных головок щлангами 5.
На крышке 6 протпвоподсосного клаиана 4 установлены электромагниты 7 и 8, рукоятка
управления 9 и датчик 10. Через крышку 6 проходит плунжер 11, закрепленный на эластичной диафрагме 12, соединенный с рукояткой управления и ноджатый прулсиной 13 к крыщке. Диафрагма 12 отделяет камеру А
кланана, постоянно соединенную с атмосферой, от камеры Б, связанной каналом а с камерой В. Камера В через щланг 5 соединяется с полостью присосной головки 2. Под плунжером Ii на небольшом расстоянии от него
расположен плунжер 14 с резиновыми прокладками 15 и 16 к пружиной 17. Плунжер 14 закрывает отверстие б, сообщающее вакуумколлектор 1 с полостью противоподсосного клапана. клапана 4 камера Б, а следовательно, и полость нрисосной головки 2 через отверстие в и зазор между плунжерами соединены с атмосферой. При срабатывании электромагнита включения 8 (или поворота влево рукоятки управления 9) плунжер и, преодолевая натяжение пружины 13 и прогибая диафрагму 12, перемещается вниз. При этом отверстие в перекрывается прокладкой 15 -плунжера 14 и доступ воздуха из атмосферы в камеры Б л В прекрапцается. После перекрытия отверстия в плунжеры 11 к 14 перемещаются вниз вместе, благодаря чему открывается отверстие б. Если уплотнительные борта присосной головки 2 герметизировали ее внутреннюю полость, то в камерах Б и В клапана сохраняется вакуум, и клапан остается включенным благодаря разности давлений «ад диафрагмой 12 и под ней. Следовательно, атмосферное давление, удерживая диафрагму в нижнем положении при наличии вакуума в полости ярисосной головки 2, само поддерживает сообщение вакуум-коллектора с присосной головкой. При включенной головке включается также датчик 10. Если через уплотнительные борта присосной головки 2 в камеры Б и В клапана проходит большое количество воздуха, то разрежение в этих, камерах уменьшается и при определенной его степени, ограниченной настройкой -пружины 17, система приходит в движение. При этом плупжеры 11 и 14 поднимаются. Вначале перекрывается отверстие б, соединяющее полость ирисосной головки 2 с вакуум-коллектором 1. Затем при дальнейшем подъеме плунжера 11 полость присосной головки 2 через отверстие в соединяется с атмосферой. Одновременно включается датчик 10. Поднимать груз и .переносить его можно только в том случае, когда срабатывают -больщипство присосных головок и все крайние. Это легко может видеть оператор при включении табло при помощи датчиком 10. Для отцепа груза включается электромагнит 7 (или рукоятка управления 9 передвигается вправо). При этом плунжер 11, и прижатый к нему пружиной 17 плунжер 14 поднимаются. В.начале перекрывается отверстие б. Затем полость головки 2 сообщается с атмосферой через камеру В, каяал а, камеру Б, зазор между плунжерами и отверстие в. Предмет изобретения 1.Вакуум-захватное устройство, предназначенное для подъема и транспортирования плоских изделий, включающее вакуум-коллектор, навешиваемый на крюк грузоподъемного механизма, вакуумный «асос, закрепленные на коллекторе с помощью подпружиненных держателей присосные головки, сообщающиеся с коллектором через противоиодсосные клапаны, отличающееся тем, что, с целью раздельного управления присосными головками и сохранения вакуума е вакуум-коллекторе при сообщении присосных головок с атмосферой, каждый противоподсоспый клапан выполнен в виде соосно расположенных подпружиненных плунжеров, один из которых закреплен на эластичной диафрагме и соединен с рукояткой упра1вления, а другой снабжен буртиком с эластичной прокладкой, перекрывающей отверстие, сообщающее полость присосной головки с вакуум-коллектором. 2.Устройство по п. 1, отличающееся тем, что, с целью контроля срабатывания присосной головки, на корпусе противоподсосного клапана установлен датчик, включающий сигнал при создании вакуума в полости присосной головки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Вакуумное захватное устройство | 1979 |
|
SU793917A1 |
| Распределительный кран вакуумного захватного устройства | 1984 |
|
SU1162724A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1263607A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1162725A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Вакуумное грузозахватное устройство | 1972 |
|
SU552270A1 |
| Противоподсосный распределитель вакуумного грузозахватного устройства | 1981 |
|
SU1049404A1 |
| Вакуумное захватное устройство | 1979 |
|
SU906887A1 |
| ВАКУУМ-ПРИСОСНОЕ УСТРОЙСТВО | 1966 |
|
SU182312A1 |