Известны устройства для -перемещения рабочего органа проходческого комбайна, выполненные в виде шарнирного параллелограмма, боковые звенья которого связаны гидродом1кратами.
В предлагаемом устройстве боковые звенья параллелограмма снабжены профилированными «улачками, воздействующими на дроссели, пропускающие поток жидкости в гидродомкраты.
Такое выполнение сохраняет ностоянную скорость перемещения рабочего органа.
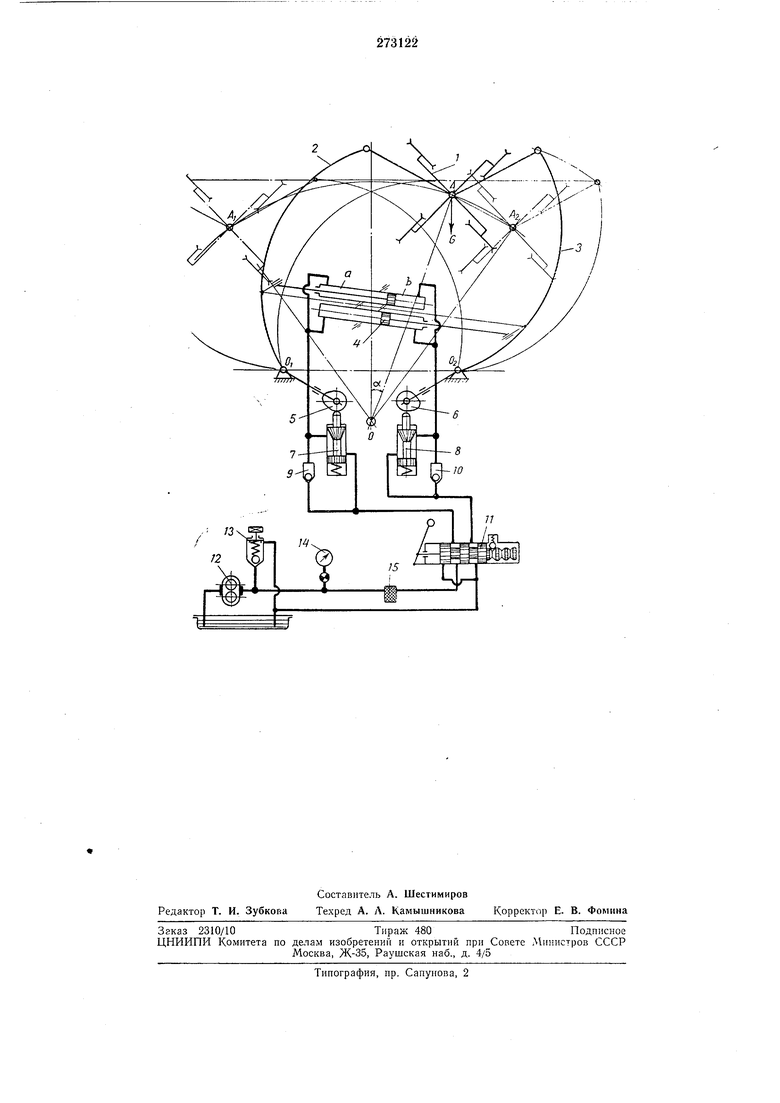
На чертеже доказано предлагаемое устройство.
Оно включает рабочий орган 1 с центром тяжести Л и весом G; точку О - мнимый центр перемещения рабочего органа; дугу AiAAz - траекторию движения рабочего органа при его перемещении на угол в ту или иную сторону от вертикали; рабочий орган связан с двумя рычагами 2 ,и 3, качающимися вокруг неподвижных осей Oi и Oz при ломощи двух шарнирно закрепленных приводных гидроцилиндров 4.
На Ъсях Oi и Oz установлены одинаковые профилированные кулачки 5 и 6, которые также поворачиваются вместе с рычагами при перемещении рабочего органа. Осевые дроссели 7 и 5 находятся в контакте с профилир01ванными кулачками и связаны гидравлическими
магистралями с гидросистемой перемещения рабочего органа. Параллельно с осевыми дросселями в гидросистему подключены обратные клапаны 9 и 10.
Управление перемещением рабочего органа комбайна осуществляется ручным реверсивным золотником //, к которому рабочая жидкость подводится от насоса 12, на напорной магистрали которого установлены предо.хранительный клала) 13, манометр 14 и фильтр 15. Перемеи1ение рабочего органа проходческого комбайна происходит следуюн1им 1 бразом. Для осун;ествления леремещения рабочего органа включается насос 12, который нагнетает рабочую жидкость в гидросистему. Рабочая жидкость, подведеиная к ручному реверсивному золотнику, направляется по гидромагистралям IB одну из двух рабочих лолостей а или Ь приводных гидроцилиндров в зависнмости от положения золотника. При включении ручного реверсивного золотника, например в его нравом крайнем положении рабочая жидкость через обратный клапан 9 поступает в полость а гидроцилиндров, а слив из полости 1)
осуществляется через осевой дроссель 8 и золотник 11 в маслобак.
Таким образом рабочий орган перемещается. Рабочий орган проходческого комбайна при своем перемещении с постоянным радиуroe крайнее положение продолжает усилие по резанию угля пли породы и переходит через вертикальную ось.. При своем движении по дуге ок руж«ости в первой половине пути составляющая собственного веса G рабочего органа складывается с полезным усилием ,по резанию (), а во второй половине пути составляющая собственного веса G рабочего органа вычитается из усилия резания (Ярез -GI). Причем при определенном значении угла «ачания составляющая от собственного веса G рабочего органа становится больше, чем усилия резания, т. е. (Ррез -G sin к) становится отрицательной величиной и приводные гидроцилиндры переходят в генераторный i(насосный) реж.им. | Когда рабочий орган совершает качательное движение, например по часовой стрелке, рабочая жидкость поступает в полость а, а из полости b сливается. Начиная с определенного положения рабочего органа, когда цилиндр качания переходит в насосный режим, установленный на сливной магистрали из полости Ь, осевой дроссель 8 под действием кулачка 6 уменьшает свое проходное сечение, вызывая повышенное сопротивление проходу рабочей жидкости так, чтобы компенсировать усилие, создающее на рабочем органе отрицательный момент. Кулачок 6 при своем повороте воздействует на осевой дроссель, уменьшая его проходное сечение, только в заранее заданном положении рабочего органа в пространстве. Причем профиль кулачка обеспечивает в любой момент времени строго определенную степень закрытия дросселя, соответствующую равномерному и положительному давлению в гидр оцил индр ах. При обратном направлении качательного движения рабочего органа рабочая жидкость поступает в полость Ь, а слив происходит из полости а через осевой дроссель 7, который также при определенном положении рабочего органа дросселирует поток рабочей жидкости, создавая повышенное сопротивление проходу жидкости, и этим стабилизирует скорость перемещения рабочего органа. Предмет изобретения Устройство для перемещения рабочего органа проходческого комбайна, выполненное в виде шарнирного параллелограмма, -боковые звенья которого связаны гидродомкратами, отличающееся тем, что, с целью сохранения постоянной скорости перемещения рабочего органа, боковые звенья параллелограмма сна-бжены профилированными кулачками, воздействующими на дроссели, пропускающие поток жидкости в гидродомкраты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 1973 |
|
SU362140A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ДЛЯ АГРЕГАТОВ | 1970 |
|
SU272235A1 |
| Устройство для перемещения рабочего органа проходческого комбайна | 1973 |
|
SU468004A1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1968 |
|
SU212929A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| КОМБАЙН ПРОХОДЧЕСКО-ОЧИСТНОЙ | 2018 |
|
RU2688711C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГОРИЫМ КОМБАЙНОМ | 1973 |
|
SU394544A1 |
| Устройство для управления горным комбайном | 1977 |
|
SU609891A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ СТРЕЛОЙ | 1971 |
|
SU294941A1 |
| Гидравлическая система программного управления стреловидным рабочим органом горной машины | 1974 |
|
SU540038A1 |