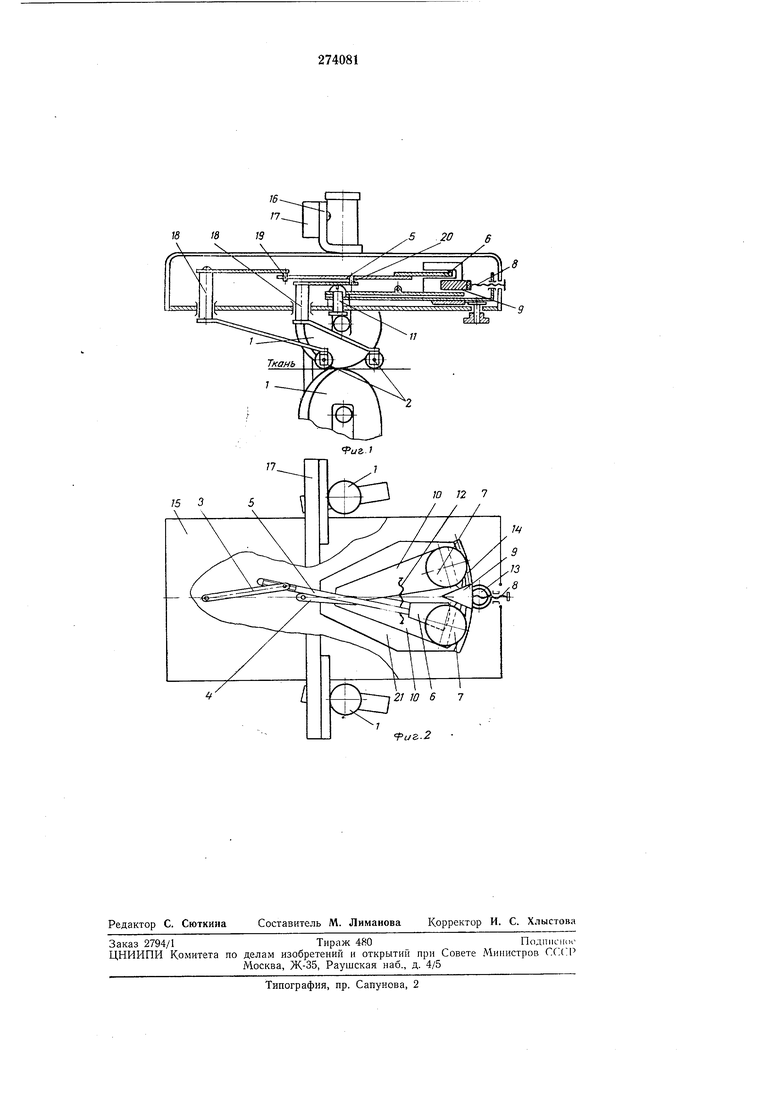
Известен датчик для обнаружения перекоса уточных нитей относительно основных в движущемся полотне ткани, используемый в установках для автоматического устранения перекоса уточных нитей при отделке тканей. Датчик содержит две пары ширильных роликов, чувствительные ролики и электромеханический преобразователь. Ткань проходит между вращающимися роликами, которые имеют равные, но противоположные углы наклона осей к кромкам ткани в плоскости, параллельной полотну. Эти ролики воздействуют через уточные нити на основные и изменяют на некотором участке ткани направление движения основных нитей, которое является функцией перекоса уточных нитей и контролируется с помощью чувствительного ролика. Перемещение последнего преобразуется в электрический сигнал, усиливающийся усилителем и используемый для управления исполнительным органом. Для устранения влияния на работу устройства бокового смещения полотна ткани второй чувствительный, ролик расположен первым. Датчик работоспосо бен только при небольшом натяжении ткани по основе и для ослабления его имеется несколько направляющих роликов, имеющих шкивы с различными диаметрами, связанные клиноременной передачей, управляемой электромагнитной муфтой. Датчик сложен по конструкции, недостаточно чувствителен, кроме того, применяя его, невозмон но изменять зону нечувствительности и задавать полол ения уточных нитей на выходе из установки. Для повышения точности регулирования описываемый датчик снабжен усилителем перемещения чувствительных роликов, задатчиком зоны нечувствительности и задатчиком положения уточных нитей. Усилитель перемещения чувствительных роликов выполнен в виде двух рычагов, жестко закрепленных на осях чувствительных роликов и заканчиваюшихся осями, на которых шаркирно укреплена кулиса с якорем, входящим в зазор головок электромеханического преобразователя. Задний чувствительный ролик введен в зону действия ширильных роликов, что позволило ликвидировать направляющие ролики и уменьшить натяжение ткани. Задатчик зоны нечувствительности выполнен в виде клина и винта, перемещением которого меняется расстояние между головками электромеханического преобразователя. Задатчик положения уточной нити выполнен в виде зубчатого сегмента и щестерни. На фиг. 1 показан описываемый датчик, продольный разрез; на фиг. 2 - то же, в плане с частичным вырывом. 3 ков /, два чувствительных .ролика 2, усилитель перемещения чувствительных роликов, задатчик зоны нечувствительности и задатчик получения уточной нити. Усилитель перемещения чувствительных ро-f ликов выполнен в виде двух рычагов 3 и 4, жестко закрепленных на осях роликов я заканчивающихся осями, на которых щарнирно укреплена кулиса 5 с якорем 6, входящим в зазор головок 7 электромеханического преоб-10 разователя. Задатчик зоны нечувствительности выполнен в виде винта 8 и клина 9. Головки 7 закреплены на пластинках 10, имеющих общий центр 11 вращения и прижимаемых к боко-15 вым поверхностям клина пружиной 12. Задатч-ик перекоса уточной нити выполнен в виде щестерни 13 с зубчатым Сегментом 14. Датчик закрыт крыщкой 15 и прикренлен угольником 16 и планкой 17 к разводному20 приспособлению, с помОЩью которого датчик вместе с щирильными роликами перемещаетСя по ШИрине ткани. Датчик работает следующим образом. Ролики 2 получают боковое перемещение в25 противоположные стороны. Жестко связанные с роликами 2 через оси 18 рычаги 5 и 4 поворачиваются также в лротивололожные стороны. С помощью осей 19 и 20 рычаги 3 м 4 поворачивают «улнеу 5. Причем благодаря вы-30 бранному соотнощению плеч рычагов 3 я 4 кулисы 5, якорь 6, находящийся на конце кулисы, получает в несколько раз большее леремещение, чем каждый чувствительный ролик 2. Якорь 6, отклоняясь От среднего положе-35 ния, вызывает срабатывание одной из головок 7 электромеханического преобразователя. Среднее положение якоря 6 устанавливается смещением одновременно обеих головок 7 4 по дуге с центром 11 вращения, которое производится поворотом шестерни 13, находящейся в зацеплении с зубчатым сегментом 14, соединенным с пластиной 21. Перемещение пластины 21 через винт 8 и клин 9 передается на головки 7. Кроме того, головки 7 могут раздвигаться при вращении винта 8, перемещающего клин 9, чем достигается изменение зоны нечувствительности датчика, Предмет изобретения 1. Датчик лерекоса уточных нитей в движущихся тканях, Содержащий две пары щирильных роликов, чувствительные ролики и электромеханический преобразователь, отличающийся тем, что, с целью новыщения точности регулирования, он снабжен усилителем перемещения чувствительных роликов, задатчиком зоны нечувствительности и задатчиком положения уточных нитей. 2. Датчик по П. 1, отличающийся тем, что усилитель перемещения чувствительных роликов выполнен в в.иде двух рычагов, жестко закрепленных на осях чувствительных роликов и заканчивающихся осями, на которых щарнирно укреплена кулиса с якорем, входящим в зазор головок электромеханического преоб.разователя. 3. Датчик по п. 1, отличающийся тем, что задатчик зоны нечувствительности выполнен в виде клина и .винта, перемещением которого меняется расстояние между головками электромеханического преобразователя. 4. Датчик ло л. il, отличающийся тем, что задатчик положения уточных нитей выполнен в виде зубчатогосегмента и щестерни.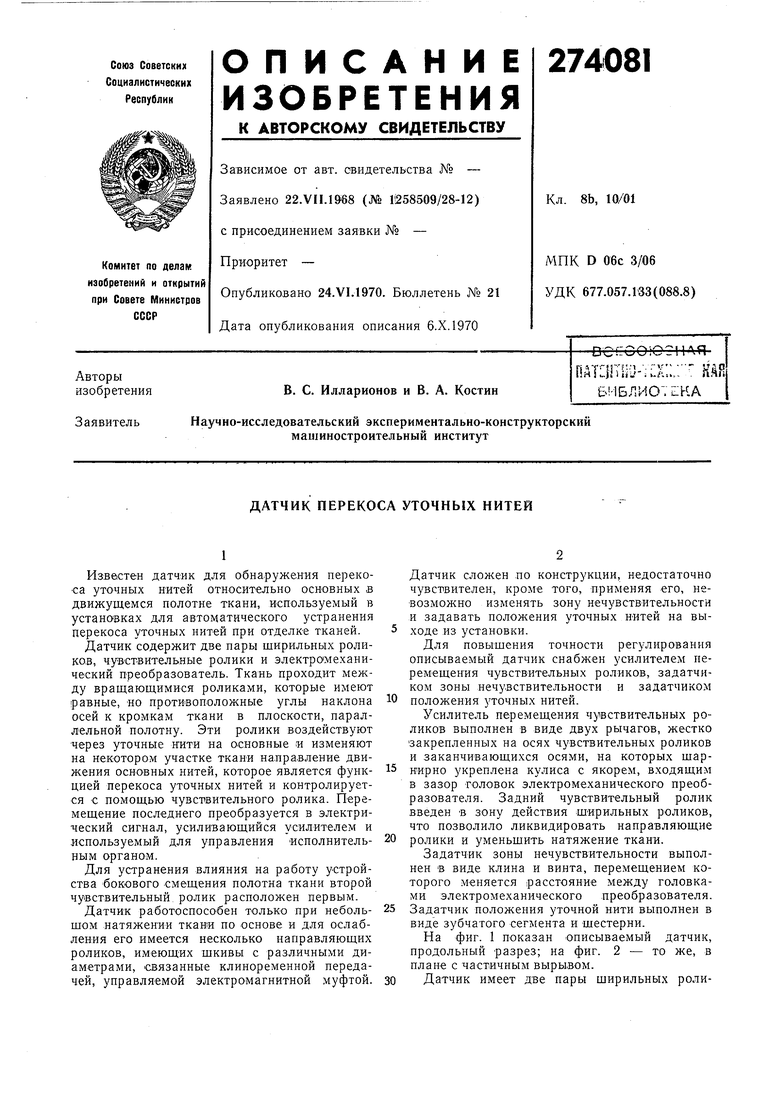
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля перекоса уточных нитей в ткани | 1990 |
|
SU1747557A1 |
| Машина для ширения и сушки текстильного полотна | 1983 |
|
SU1121336A1 |
| АВТОМАТ ПРАВКИ УТКА | 1973 |
|
SU386043A1 |
| ДАТЧИК ЛИКВИДАЦИИ ПЕРЕКОСА ТКАНИ | 1971 |
|
SU316800A1 |
| Цепная ширильная машина для ткани | 1959 |
|
SU123142A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЛИКВИДАЦИИ ПЕРЕКОСА ТКАНИ НА ШИРИЛЬНЫХ МАШИНАХ | 1966 |
|
SU178351A1 |
| Способ устранения перекоса ткани на сушильно-ширильной машине | 1980 |
|
SU1006558A1 |
| Устройство для устранения перекоса уточных нитей ткани | 1949 |
|
SU88915A1 |
| УСТРОЙСТВО для КОНТРОЛЯ и ИСПРАВЛЕНИЯ ПЕРЕКОСОВ УТКА В ТКАНИ НА ЗАПУСКЕ В МАШИНЫ ОТДЕЛОЧНОГО | 1968 |
|
SU212221A1 |
| Способ беления текстильного полот-HA и уСТРОйСТВО для ЕгО ОСущЕСТВлЕ-Ния | 1979 |
|
SU796272A1 |