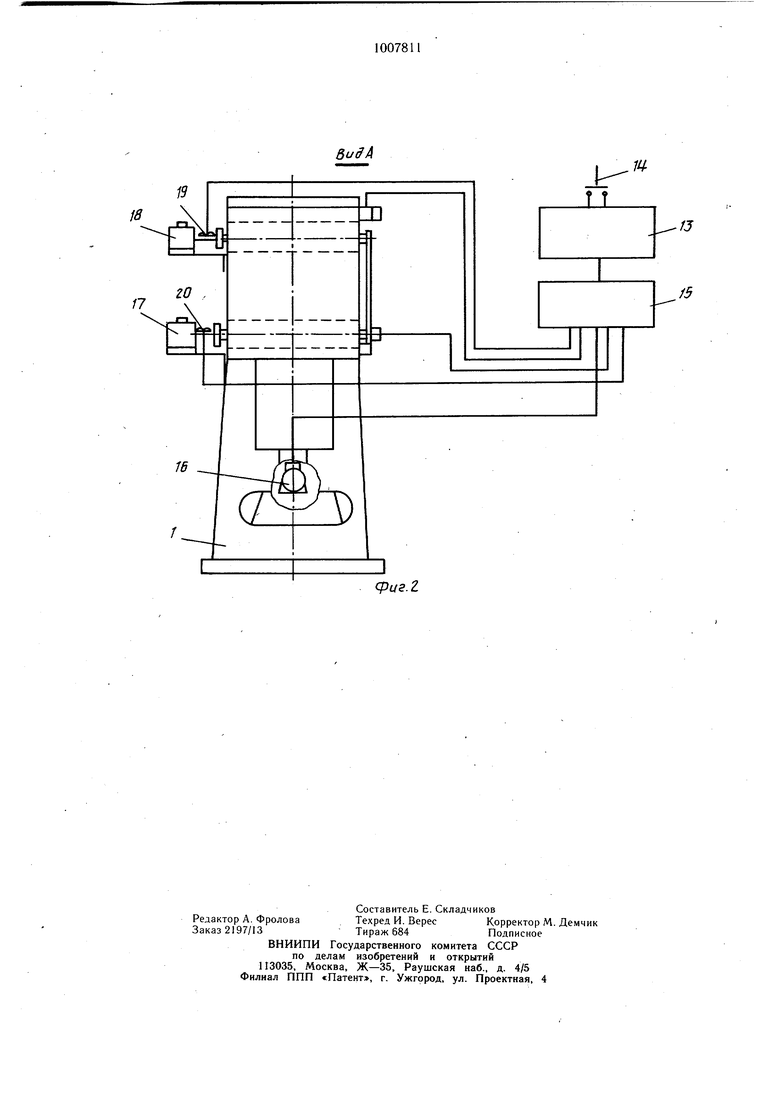
Изобретение относится к машиностроению и может быть использовано в конструкциях пневматических молотов. Известно устройство для управления пневматическим молотом, содержащее командоаппарат, выхадной вал которого снабжен кулачками с профилем, обеспечивающими серию ударов заданной энергии, взаимодействующими с кранами, установленными в магистрали, связывающей цилиндр компрессора с рабочим цилиндром молота и таймерными дисками, взаимодействующими, в свою очередь, с бесконтактными выключателями, 1юдающими сигналы на включение разгрузочных клапанов, установленных в корпусе компрессорного цилиндра и служащих для соединения его полостей с атмосферой. Командоаппарат устройства кинематически связан с приводом молота 1. Недостатком устройства является малая надежность из-за сложности кинематической цепи, связывающей командоаппарат с приводом молота, низкая точность задания энергии удара, малая гибкость в переналадке. Цель изобретения - повышение надежности, точности задания энергии удара и удобств в обслуживании. Поставленная цель достигается тем, что устройство для управления пневматическим молотом с кривощипным приводом компрессорного цилиндра, содержащее гриводные кинематически связанные между собой краныуправления молотом7наборник программ, электрически связанный с кнопкой управления, управляющее устройство, электрически соединенное с приводом кранов управления и наборником программ, снабжено датчиком угла поворота кривошипа, электрически связанным с управляющим устрой.pgQjj На фиг. 1 схематически показан молот с устройством управления, общий вид; на фиг. 2 - вид А на фиг. 1. Молот содержит размещенные в станине 1 рабочий цилиндр 2 с поршнем 3 и бабой 4, компрессорный цилиндр 5 с поршнем 6, приводимым через кривошипный вал 7 от электродвигателя. Устройство управления молотом содержит связанные тягой 8 через поводки 9 и 10 приводные краны 11 и 12 управления, наборник 13 программ, электрически связанный с кнопкой 14 управления, управляющее устройство 15, электрически соединенное с приводом кранов управления и наборником программ и датчик 16 угла поворота кривошипа 7, например, сельсинного типа, электрически связанный с управляюшим устройством 15. Привод кранов управления осуществляется от электродвигателей 17 и 18 противоположного по отношению друг к другу направления вращения через электрически управляемые муфты 19 и 20. Имеются магнитные упоры-фиксаторы 21 и 22 ПОЕЮДКОВ 9 и 10. Связь управляющего устройства 15 с приводом кранов управления осуилествляется через муфты 19 ,и 20 и датчики 23 и 24 крайних положений кранов И и 12 управления. Устройство работает следующим образом. С помощью наборника 13 программ задаются число программных ударов и энергия каждого из них. Включается привод молота. После нажатия кнопки 14 в положении кривошипа 7, определяемом датчиком 16 и задаваемом настройкой наборника 13 программ, управляющее устройство 15 включает муфту 19, в результате чего краны управления поворачиваются в положение, соответствующее режиму «Удар, и магнитным упором-ф иксатором 21 в этом положении фиксируются. При этом муфта 19 датчиком 23 выключается, а молот совершает удар. Затем при другом положении кривошипа 7, определяемом датчиком 16 и задаваемом наборником 13 программ, включается муфта 20, в результате чего краны управления возвращаются в исходное положение, в котором фиксируются упором-фиксатором 22, а муфта 20 датчиком 24 выключается. Следующий программный уда-р будет нанесен либо при повторном нажатии кнопки 14, либо при удержании ее в нажато.м положении. Моменты поворота кранов управления в положение режима «Удар и обратно, задаваемое наборником программ, выбирается из условий обеспечения требуемой энергии удара и оптимальности работы привода. Экономический эффект от внедрения изобретения обеспечивается за счет точности задания энергии удара, повышении надежности и производительности при сокращении сроков переналадки молота на другую программу.
cpus.Z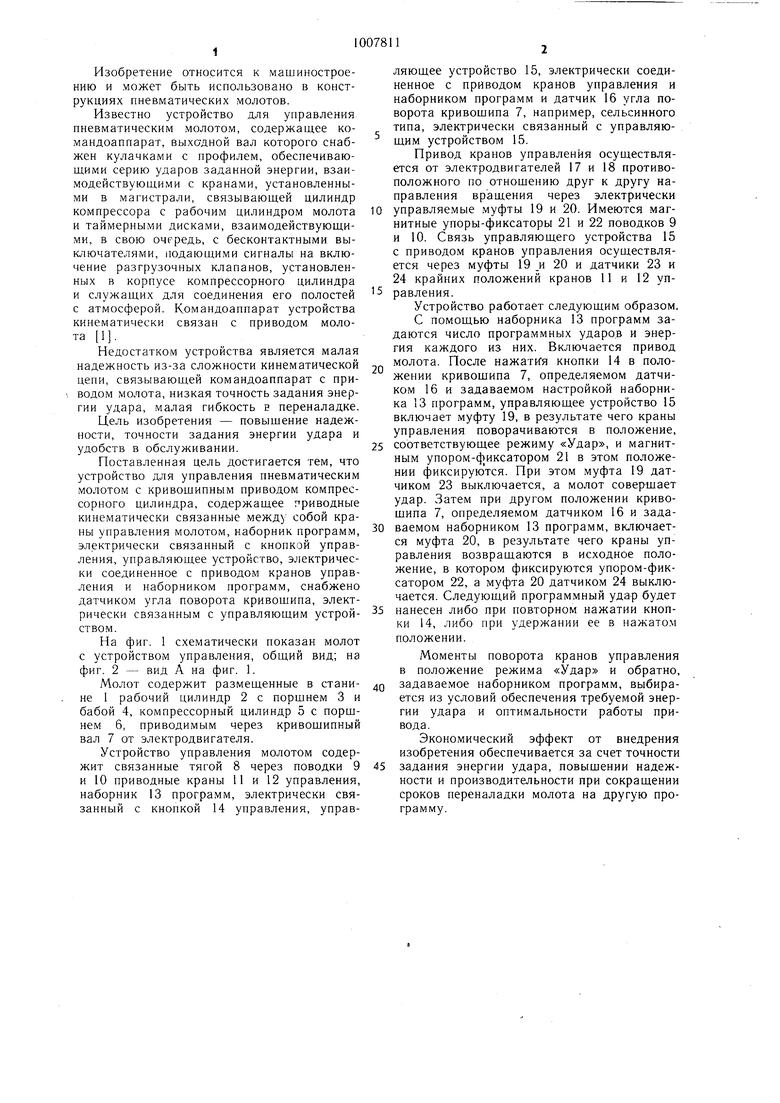
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления | 1974 |
|
SU735830A1 |
| УСТРОЙСТВО для | 1969 |
|
SU258008A1 |
| Система управления пневматическим молотом с закрепленным на станине ресивером | 1983 |
|
SU1076175A1 |
| Пневматический молот | 1972 |
|
SU454078A1 |
| УСТРОЙСТВО ДИСТАНЦИОННО-ПРОГРАММНОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМИ МОЛОТАМИ | 1970 |
|
SU276706A1 |
| ПАРОВОЗДУШНЫЙ молот | 1967 |
|
SU199645A1 |
| Система управления приводным пневматическим молотом | 1986 |
|
SU1353561A1 |
| Механический пресс | 1982 |
|
SU1071358A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ КОВОЧНЫМ МОЛОТОМ | 1969 |
|
SU244846A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ МОЛОТОМ фиг./ с кривошипным приводом компрессорного цилиндра, содержащее приводные кинематически связанные между собой краны управления молотом, наборник программ, электрически связанный с кнопкой управления, управляющее устройство, электрически соединенное с приводом кранов управления и наборником программ, отличающееся тем, что, с целью повышения надежности, точности задания энергии удара и удобства в обслуживании, оно снабжено датчиком угла поворота кривошипа, электрически связанным с управляющим устройством. ,г/ i (Л сх 23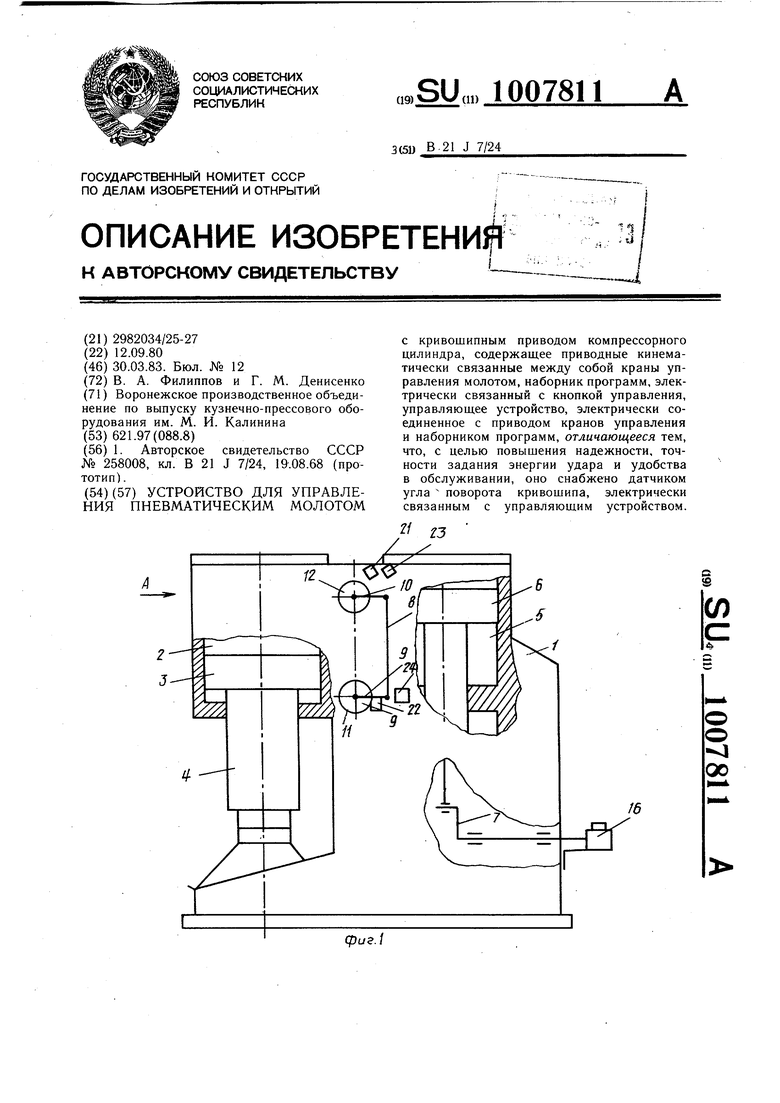
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для | 0 |
|
SU258008A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
