Известны шагающие грузоподъемные устройства, содержащие силовой и поддерживающие клиновые захваты, связанные общей направляющей, и гидравлический цилиндр, шток которого соединен с силовым захватом, а корпус- с поддерживающим захватом. Однако это устройство может перемещать груз только в направлении, противоположном направлению приложения нагрузки.
Предлагаемое устройство отличается тем, что в нижней части цилиндра установлен дополнительный поршень, шток которого связан с клином поддерживающего захвата, а в верхней части цилиндра размеп1ен дополнительный порщень со щтоком, проходящим через выполненный полым основной шток и через канал в силовом захвате до упора в его клин.
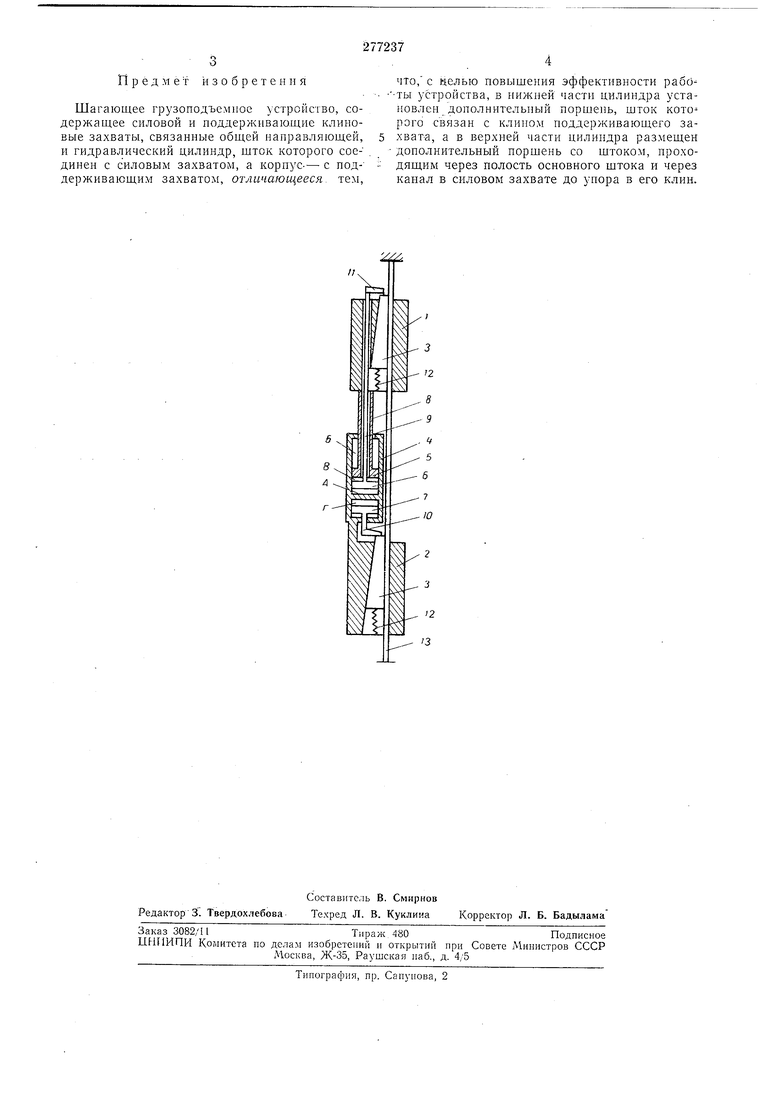
На чертеже изобрал ено описываемое устройство.
Устройство состоит из двух клиновых захватов. В силовом -И поддерживающем захватах / и 2 расположены клннья 3. Захваты управляются гидравлическим механизмом, включающим двухкамерный цилиндр 4 с поршнями 5, и 7 и штоками S, 9 и 10. Цилиндр жестко соединен с поддерживающим захватом 2. Шток 8, через который проходит шток 9, выполнен полым. Шток 9 проходит через канал в силовом захвате 1 и имеет на конце упор //, служащий для утапливания клина 3. Клинья 3 поджаты пружинами 12 к корпусам захватов и к направляющей ГУ, п-роходящей через захваты.
При подъеме груза давление подается в камеру А цилиндра 4, и поршень б поднимается одновременно с поршнем 5. Шток 8 упирается в корпус захвата / и подает его вверх вместе
с грузом. Вся система опирается на захват 2. Для подтягивания поддерживающего захвата 2 давление подается в камеру Б цилиндра 4. Цилиндр перемещается вверх, увлекая за собой захват 2. Силовой захват / в это время заклииен нод действием груза. После этого цикл повторяется.
При опускании груза давление подается в камеру В и А цилиндра. При этом- шток 9 упором 11 уппрается в клин 3 захвата /, а
щток 8 расклинивает захват /, после чего он иод действием груза опускается, выдавливая кидкость из камеры А. В конце хода давление в камере В сбрасывается, и происходит заклинивание силового захвата / иод нагрузкой.
Для опускания на иовую позицию поддерживающего захвата 2 давление подается в камеры Г и А, и происходит расклиннвание захвата 2 и его опускание. В конце хода давление в ка.мере Г сбрасывается, и поддерживаюПредмет Р 3 о б р е т е и и я
Шагающее грузоподъемное устройство, содержащее силовой и поддерживающие клиновые захваты, связанные общей направляющей, и гидравлический цилиндр, щток которого соедннеи с силовым захватом, а корпус-- с поддерживающим захватом, отличающееся, тем.
что, с целью повыщения эффективности рабо ты устройства, в нижней части цилиндра установлен дополнительный порщень, щток которого связан с клином поддерживающего захвата, а в верхней части цилиндра размещен дополнительный порщень со щтоком, проходящим через полость основного щтока и через канал в силовом захвате до унора в его клин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический домкрат | 1976 |
|
SU1074813A1 |
| Захват для изделий с отверстием | 1987 |
|
SU1449516A1 |
| Гидравлический привод | 1971 |
|
SU661161A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176016C1 |
| Ограничитель грузоподъемности стреловых подъемных кранов | 1958 |
|
SU115136A2 |
| Манипулятор | 1985 |
|
SU1265041A1 |
| Многозахватный гидравлический подъемник | 1983 |
|
SU1122802A1 |
| ГИДРОСИСТЕМА ТРАНСПОРТНОГО УСТРОЙСТВА | 1971 |
|
SU310061A1 |
| Тормозной пневмопружинный цилиндр | 1971 |
|
SU442325A1 |
| Упор демпфирующий | 1983 |
|
SU1122428A1 |