Изобретение относится к области транспортных устройств и может быть использовано в станках, автоматических линиях и грузоподъемных машинах, где необходимо перемещение деталей в ориентированном положеНИИ.
Для перемещения деталей без направляющих применяют гидросистемы с двумя гидроцилиндрами - верхним и нижним, щток одного из которых толкает, а другого - поддерживает деталь непосредственно или через клиновые, рычажные и другие механизмы. Такие гидроцилиндры управляются двумя реверсивными золотниками и двумя дросселями с обратными клапанами. Дроссели установлены в гидросистеме таким образом, что жидкость поступает в цилиндры толкающий и поддерживающий через обратные клапаны, а сливается из толкающего цилиндра свободно, а из поддерживающего - через дроссель.
Эта гидросистема транспортного устройства имеет следующие недостатки:
сложность управления работой гидроцилиндров (для подвода штоков к детали необходимо включить два реверсивных золотника, а для транспортирования детали в ориентированном положении сначала необходимо переключить золотник толкающего цилиндра, а затем - золотник поддерживающего цилиндра);
произвольное опускание детали под действием собственного веса при остановке в промежуточном положении, из-за утечек в золотнике или при падении давления в гидросистеме.
Целью данного изобретения является устранение указанных недостатков - упрощение управления работой гидроцилиндров и повышение надежности работы.
Согласно изобретению поставленная цель достигается тем, что реверсивные золотники имеют один общий слив, на котором установлен напорный золотник, а между реверсивным золотником и бесштоковой полостью нижнего цилиндра установлен обратный клапан, управляемый логическим клапаном «ИЛИ- ИЛИ, соединенным постоянно с обеими полостями указанного цилиндра.
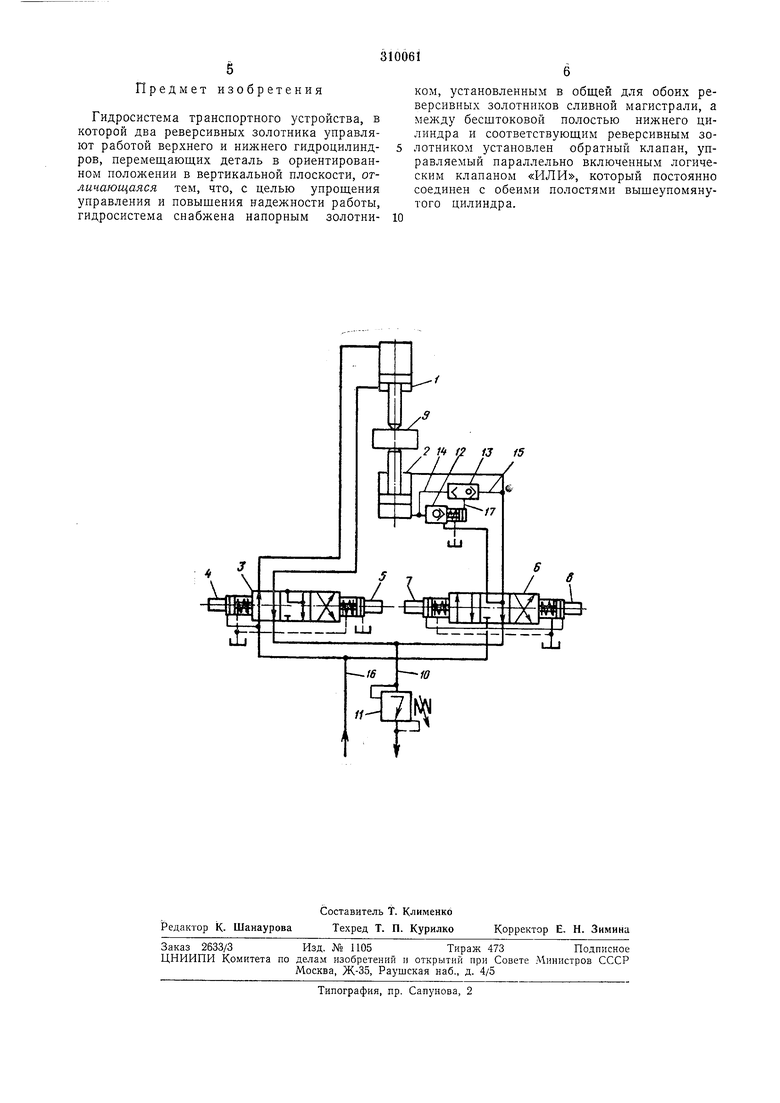
На чертеже изображена принципиальная гидросхема транспортного устройства.
Гидросистема транспортного устройства содержит гидроцилиндры 1 и 2, управляемые соответственно реверсивным золотником 3 с электромагнитами и 5, и реверсивным золотником 6 с электромагнитами 7 и S. Цилиндры 1 и 2 служат для перемещения детали 9. Реверсивные золотники 5 и 5 имеют общую сливную линию 10, в которой установлен запорный золотник //. Между реверсивным золотником 6 и бесщтоковой полостью цилиндра 2 установлен обратный клапан 12, управляемый логическим клапаном «ИЛИ 13, который присоединен к полости цилиндра 2 магистралями 14 и 15. Магистраль 16 служит для подвода жидкости от насоса к реверсивным золотникам 3 и 6. Логический клапан 13 соединен с обратным клапаном 12 магистралью 17. Гидросистема транспортного устройства позволяет осуществлять перемещение детали вверх и вниз и останов детали в любом положении. Гидросистема работает следующим образом. Захват детали. При включении электромагнита 7 жидкость под давлением поступает через обратный клапан 12 в бесщтоковую полость цилиндра 2 и перемещает порщень до упора в деталь 9. При этом жидкость, вытесняемая из щтоковой полости цилиндра 2, через золотники 5 и 5 поступает в бесщтоковую полость цилиндра 1, который, работая по дифференциальной схеме, также прижимает шток к детали 9. Перемещение детали вниз. При включении электромагнита 4 и отключении электромагнита 7 жидкость под давлением поступает через золотник 3 в бесщтоковую полость цилиндра 1 и перемещает деталь 9, щток и порщень цилиндра 2 вниз. Жидкость из бесштоковой полости цилиндра 2 вытесняется в магистраль 14 и через логический клапан 13 и магистраль 17 открывает обратный клапан 12. Жидкость, вытесняемая из щтоковой полости цилиндра / и из бесщтоковой полости цилиндра 2, поступает в штоковую полость цилиндра 2, а излищек сливается через напорный золотник //. Так как обе полости цилиндра находятся под давлением, поддерживаемым напорным золотником, то вследствие того, что цилиндр 2 включен по дифференциальной схеме, шток цилиндра постоянно лоджат к детали 9 с силой, на которую отрегулирован напорный золотник 11. Остановка детали в нижнем положении. Для останова детали 9 в нижнем положении электромагнит 4 отключается. Вследствие остановки порщня цилиндра 1 давление в бесщтоковой полости цилиндра 2 снижается, что обеспечивает закрытие обратного клапана 12 и запирание порщня и щтока цилиндра 2. Освобождение детали в нижнемположении. Для освобождения детали в нижнем положении включают электромагниты 5 и S. При этом щток цилиндра 1 отводится иод давлением жидкости, поступающей в бесщтоковую полость, а щток цилиндра 2 - под давлением жидкости, поступающей в штоковую полость цилиндра 2 и одновременно открывающей через магистраль /5 логический клапан 13, магистраль 17 обратный клапан 12, который соединяет бесштоковую полость цилиндра 2 со сливом. При необходимости перемещения детали в верхнее положение гидросистема работает следующим образом. Захват детали. При включении электромагнита 4 жидкость под давлением поступает в бесщтоковую полость цилиндра 1 и перемещает порщень до упора в деталь 9. При этом жидкость, вытесняемая из щтоковой полости цилиндра /, через золотники 5 и & и обратный клапан 12 поступает в бесщтоковую полость цилиндра 2, который, работая по дифференциальной схеме, также прижимает щток к детали. Перемещение детали вверх. При включении электромагнита 7 и отключении электромагнита 4 жидкость под давлением поступает через золотник 6 и обратный клапан 12 в бесштоковую полость цилиндра 2 и перемещает деталь 9, шток и поршень цилиндра 1 вверх. Жидкость, вытесняемая из щтоковой полости цилиндра 2 и бесщтоковой полости цилиндра 1, поступает в щтоковую полость цилиндра 1, а излищек сливается через напорный золотник 11. Так как обе полости цилиндра 1 находятся под давлением, то вследствие того, что цилиндр включен по дифференциальной схеме, щток цилиндра постоянно поджат к детали 9 с силой, на которую отрегулирован напорный золотник. Останов детали в верхнем п ол о ж е н и и. Для останова детали 9 в верхнем положении электромагнит 7 отключается, обратный клапан закрывается, чем обеспечивается запирание порщня и щтока цилиндра 2. Освобождение детали в верхнем положении. Для освобождения детали в верхнем положении включают те же аппараты, что и при освобождении детали в нижнем положении. Если во время перемещения детали давление падает, то обратный клапан 12 запирает бесщтоковую полость цилиндра 2 и предупреждает падение или опускание под тяжестью собственного веса. Предлагаемая гидросистема может быть использована и для перемещения детали в горизонтальном направлении, для чего на агистрали, соединяющей бесштоковую поость цилиндра 1 с реверсивным золотником , устанавливают обратный и логический клапаны.
предмет изобретения
Гидросистема транспортного устройства, в которой два реверсивных золотника управляют работой верхнего и нижнего гидроцилиндров, перемещающих деталь в ориентированном положении в вертикальной плоскости, отличающаяся тем, что, с целью упрощения управления и повышения надежности работы, гидросистема снабжена напорным золотником, установленным в общей для обоих реверсивных золотников сливной магистрали, а между бесштокоБОЙ полостью нижнего цилиндра и соответствующим реверсивным золотником установлен обратный клапан, управляемый параллельно включенным логическим клапаном «ИЛИ, который постоянно соединен с обеими полостями вышеупомянутого цилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Гидросистема управления механизированной крепью | 1978 |
|
SU730970A1 |
| Автоматическая линия для сборки роликов | 1974 |
|
SU676415A1 |
| СИЛОВАЯ ГИДРАВЛИЧЕСКАЯ ГОЛОВКА ДЛЯ СВЕРЛЕНИЯ ГЛУБОКИХ ОТВЕРСТИЙ | 1973 |
|
SU406653A1 |
| АВТОМАТ ДЛЯ ПРЕССОВАНИЯ ПЛАСТМАССОВЫХ ТАБЛЕТОК | 1969 |
|
SU238130A1 |
| Протаскивающий механизм сучкорезной машины | 1985 |
|
SU1344603A1 |
| Гидросистема металлорежущего станка | 1977 |
|
SU659356A1 |
| Гидрофицированный протяжной станок | 1985 |
|
SU1289627A1 |
| Холодновысадочный автомат | 1978 |
|
SU763031A1 |
| Гидравлический привод протяжного станка | 1980 |
|
SU917970A1 |
It (2 13 15 I / / /
