Изобретение относится к средствам автоматизации кузнечно-штамповочных работ. Цель изобретения - упрощение системы управления и снижение материалоемкости. На чертеже изображен манипулятор, разрез. Манипулятор содержит в горизонтальной цилиндрической полости корпуса 1 шток-поршень 2, являющийся корпусом другого силового цилиндра для выдвижения захвата, внутри которого встроен второй шток-поршень 3, подпружиненный пружиной 4 сжатия. На конце щтока шток-порщня 3 на оси 5 установлены с возможностью качания два захватных рычага 6. В шток-поршне 3 выполнены цилиндрические отверстия, где размещен шток-порщень 7 подпружиненный пружиной 8 сжатия. На конце щтока шток-порщня 7 установлена неподвижно траверса 9, связанная шарнирно тягами 10 с звахатными рычагами 6. В вертикальной цилиндрической полости сложной формы корпуса 1 установлен шток-поршень 11 для подъема и опускания корпуса 1 с захватным устройством, неподвижно закрепленный, например, на транспортной линейке 12. Корпус 1, шток-порщни 2 и 3 имеют отверстия сложной формы для управления работой силовых цилиндров в определенной последовательности. Общая заштоковая полость 13 силовых цилиндров со шток-порщнями 2, 3 и 7 сое/щнена посредством отверстия 14 с системой подачи рабочей среды. Штоковая полость 15 щток-порщня 3 связана с атмосферой отверстием 16. Штоковая полость 17 щтокпорщня 7 соединена с полостью 15 отверстием 18. В шток-поршнях 2 и 3 выполнены соответственно каналы 19 и 20, соединяющие в положении максимального выдвижения щток-порщней 2, 3 и 7 полость 13 с полостью 21 силового цилиндра подъема посредством канала 22, выполненного в корпусе 1. Штоковая полость 23 щток-поршня 2 соединена каналом 24 с полостью 25, которая связана отверстием 26 с системой подачи рабочей среды. Манипулятор работает следующим образом. В исходном положении корпус 1 занимает крайнее нижнее положение, а шток-поршни 2, 3 и 7 находятся в крайнем левом положении. При подаче воздуха в полость 13 корпуса 1 через отверстие 14 щток-порщень 2 начинает перемещаться вправо вместе с встроенными внутри него узлами. Хотя сжатый воздух воздействует одновременно на шток-поршни 2, 3 и 7, шток-поршни 3 и 7 остаются неподвижными относительно щток-поршня 2, так как его движению препятствуют силы трения, а шток-порщни 3 и 7 подпружинены пружинами сжатия 4 и 8 и кроме того площадь рабочей поверхности порщня щток-поршня 2 больше площадей рабочих поверхностей шток-поршней 3и 7. При движении вправо щток-порщня воздух из полости 23 стравливается через анал 24 в полость 25 и далее через отверсие 26 в атмосферу. При достижении щтокоршнем 2 упора корпуса 1 он останавливает я, а шток-порщни 3 и 7 под действием сжато, го воздуха продолжают движение вправо. ри этом шток-поршень 7 остается неподвиж. ьш относительно шток-порщня 3 ввиду разых площадей рабочих поверхностей поршей и разных относительных усилий пружин и 8. Во время этого этапа сжимается пруина 4, а воздух из полости 15 уходит через тверстие 16 в атмосферу. При достижении щток-поршнем 3 упора на щток-поршне 2 он останаливается, захватное устройство полностью выдвинуто и начинает движение шток-поршень 7, сжимая пружину 8 и перемещая траверсу 9, которая через тяги 10 воздействует на захватные рычаги 6, поворачивая их вокруг неподвижной оси 5 один навстречу другому и захватные рычаги 6 зажимают заготовку. При этом воздух из полости 17 через отверстие 18, полость 15 и отверстие 16 стравливается в атмосферу. Во время окончания движения вправо шток-поршней 2, 3 и 7 совмещаются каналы 19, 20 и 22 и так как доступ воздуха из полости 13 в канал 24 невозможен ввиду того, что он будет перекрыт частью поршня щток-порщня 2, то воздух из полости 13 будет поступать через совмещенные каналы только в полость 21 над поршнем штокпорщня 11, поднимая корпус 1 вверх. Канал 24 при этом перекрывается и поршнем щток-поршня 11. Зажатая захватными рычагами 6 заготовка может транспортироваться на другую позицию обработки. При подаче сжатого воздуха в полость 25 через отверстие 26 корпус 1 опускается, а сжатый воздух из полости 21 проходит по системе совмещенных каналов в отверстие 14 и в атмосферу. Пока происходит опускание корпуса 1, вытесняемый воздух из полости 21 с большей скоростью, чем поступает в полость 25, попадает в полость 13 и не позволяет там упасть давлению, и шток-поршни 3 и 7 остаются в крайнем правом положении. Это достигается за счет того, что рабочая площадь поверхности поршня щток-поршня 11 вверху значительно больше, чем внизу. При окончании опускания корпуса 1 вниз цилиндрический выступ вверху щтокпоршня 11 входит в глухое отверстие корпуса 1 и тем самым снижает рабочую поверхность поршня вверху, делая ее меньшей, чем внизу. В то же время открывается канал 24 и сжатый воздух из полости 25
поступает в полость 23. Так как рабочая поверхность с правой стороны поршня штокпоршня 2 относительно мала, а значит и усилие, воздействуюшее на поршень, невысоко, и, кроме того, сжимаемый воздух в образовавшейся полости 25 при входе выступа вверху шток-поршня 11 в глухое отверстие корпуса 1 препятствует перемеш,ению корпуса 1 вниз, вызывая замедление движения, то давление в полости 13 в это время значительно падает. Поэтому шток-поршень 7, а затем шток-поршень 3 под воздействием сжатых пружин 8 и 4 перемешаются влево.
Захватные рычаги 6 раскрываются, освобождая заготовку. Поступающий сжатый воздух из полости 25 через канал 24 в полость 23 перемешает шток-поршень 2 также влево до исходного положения. Сжатый воздух поступает и в полость 21 через открывшийся канал 22, но так как рабочая плош,адь вверху поршня шток-поршня 11 стала меньше, чем внизу, то положение корпуса 1 не изменяется.
Манипулятор имеет простую систему управления и низкую метатериалоемкость.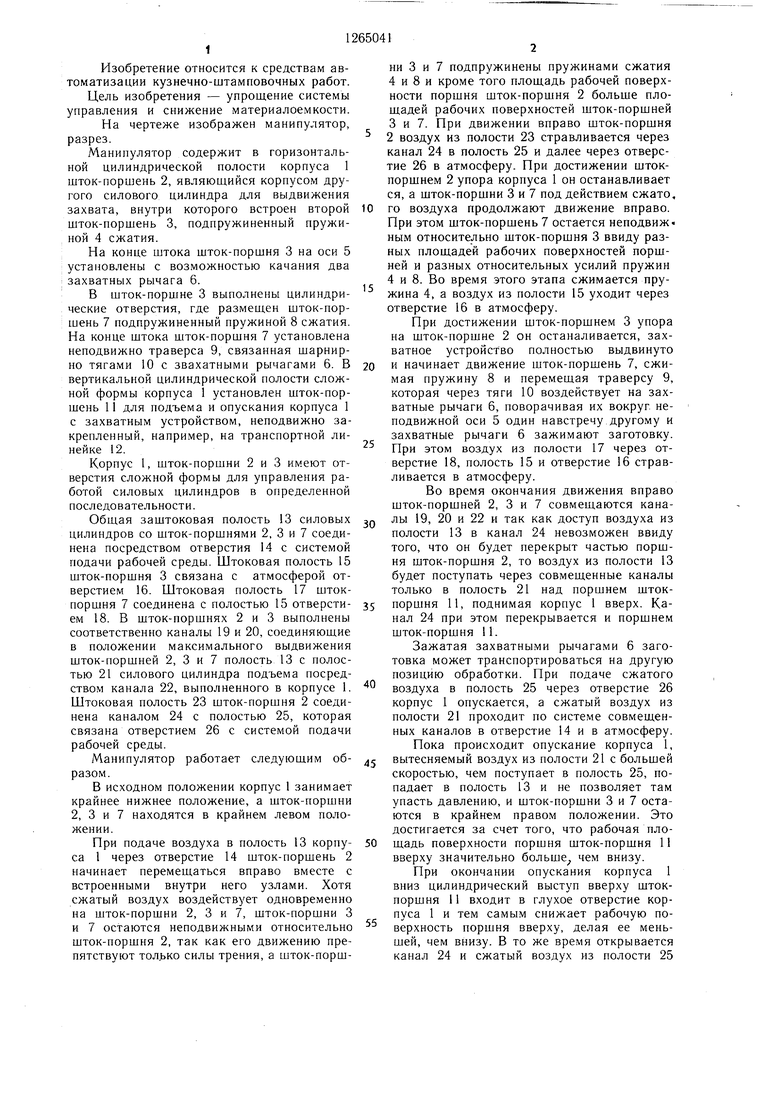
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯ Iпл:п:^;о-т[лг;;г;[-ндя'j^j^xmiir"— "^ Г^ П Г .! ^"У •• — • .- лL.-: .L-fv It i^^ i ;^i Ij--^ | 1971 |
|
SU300294A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Подвесной манипулятор | 1977 |
|
SU733844A1 |
| Силовой цилиндр | 1986 |
|
SU1498988A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Бортовой редуктор транспортного средства | 1981 |
|
SU1031801A2 |
| Самореверсирующийся сервоцилиндр | 1984 |
|
SU1270430A2 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Устройство для подачи материала в зону обработки | 1988 |
|
SU1523232A1 |
| Устройство ударного действия | 1982 |
|
SU1092273A1 |
МАНИПУЛЯТОР, содержащий основание и последовательно установленные приводы подъема и линейного перемещения захватного устройства, выполненного в виде связанных с приводом и шарнирно установленных на его корпусе захватных рычагов, отличающийся тем, что, с целью упрощения системы управления и снижения материалоемкости, привод линейного перемещения захватного устройства выполнен в виде телескопического силового цилиндра с общей заштоковой плоскостью, при этом внутренний порщень цилиндра подпружинен относительно его внешнего щтока, и представляет собой корпус захватного устройства, а заштоковая полость силового цилиндра привода захватного устройства соединена с защтоковой полостью телескопического силового цилиндра, кроме того, поршень силового цилиндра привода захватного устройства подпружинен относительно внутреннего штока телескопического силового цилиндра, причем жесткость этой пружины выше жесткости пружины, расположенной между внутренним и внешним штоками телескопического силового цилиндра, одна из полостей силового цилиндра подъема имеет возможность соединения с заштоковой полостью телескопического силового цилиндра посредством каналов, выполненных во внешнем и внутреннем поршнях телескопического силового цилиндра в положении максималь§ ного выдвижения штоков телескопического силового цилиндра, а другая полость сило(Л вого цилиндра подъема соединена со штоковой полостью внешнего поршня телескопического силового цилиндра. to О5 сд
| Промышленный робот | 1977 |
|
SU738864A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
