Известно устройство для сборки шариковых ручек, содержащее станину, захватные приснособления с рабочими элементами ио форме удерживаемых ими деталей ручки, транспортирующий механизм с приводом и механизм фиксирования собранных деталей.
Предлагаемое устройство отличается от известного тем, что его станина выполнена в виде двух установленных с зазором илат, захватные присиособления выполнены в виде взаимно подпружиненных пар рычагсв. Каждый из рычагов шарнирно закреплен на соответствующей плате станины, а рабочие элементы этих рычагов установлены соосно собой по линии зазора в последовательности, оиределяемой технологическим процессом сборки. Транспортирующий механизм вьшолнеи в виде замкнутого конвейера с последовательно закрепленными на нем толкателями, установленными по линии зазора и взаи.модействующими с лервой по ходу своего движения деталью. Механизм фиксирования представляет собой механизм свинчивания и выполнен в виде взаимно подпружиненных рычагов, числом не менее двух. Каждый из этих рычагов закреплен, на соответствующей плате станины, снабжен свободно вращающимся роликом, взаимодействующим с одной из свинчиваемрлх деталей, и обеспечивает вращение этой детали при ее перемещении.
На конвейере перед толкателем но ходу его движения закреплен выбрасыватель, выполненный в виде стержня, расположенного ниже оси рабочих элементов захватных приспособлений и взаимодействующего с собранной ручкой при изменении траектории своего движения.
Все это позволяет повысить производительность сборки.
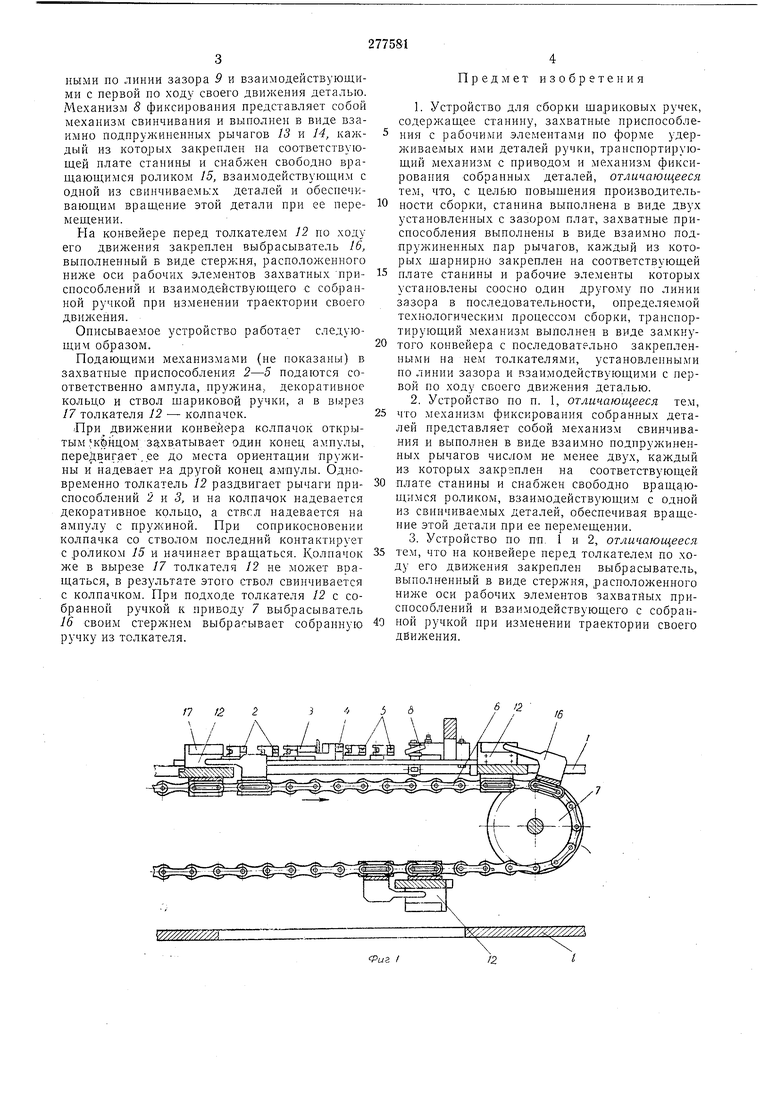
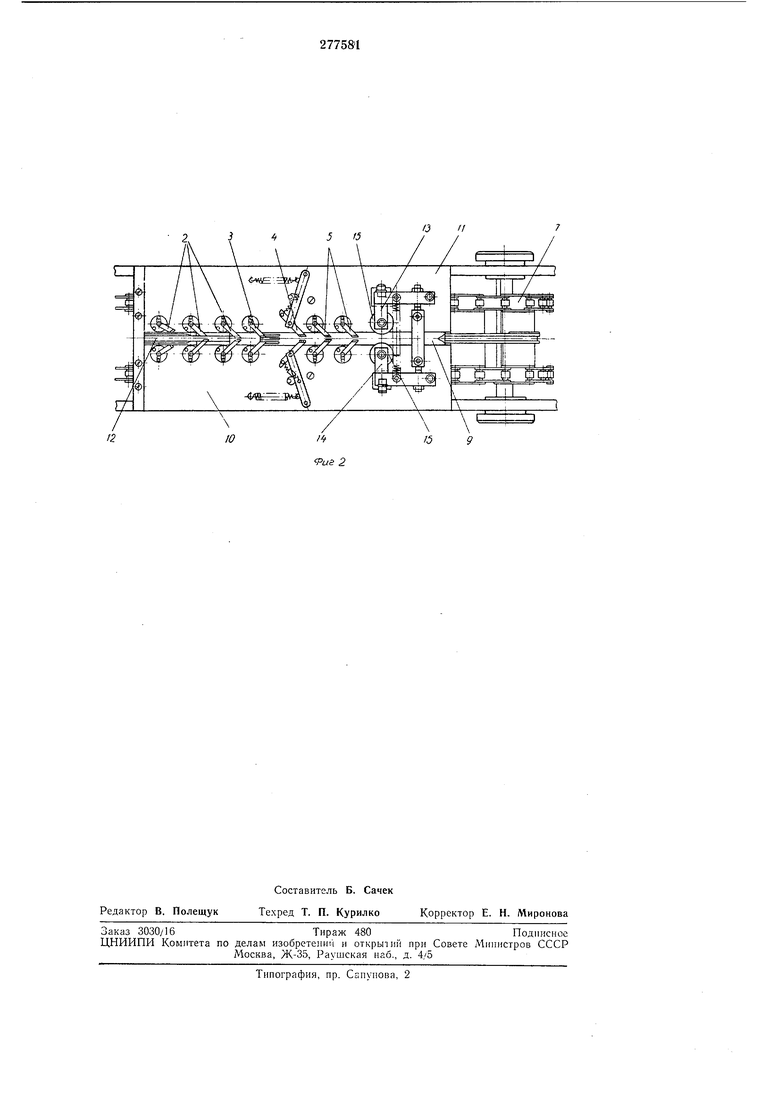
На фиг. 1 схематически изображено описываемое устройство, вид сбоку; на фиг. 2 - то же, вид в плане.
Устройство для сборки щариковых ручек содержит станину /, захватные приспособления 2-5 с рабочими элементами по форме удерживаел ых ими деталей ручки, транспортирующий механизм 6 с приводом 7 и механизм 8 фиксирования собранных деталей.
Станина 1 выполнена в виде установленных с зазором 9 илат 10 и 11. Захватные приспособления 2-5 выполнены в виде взаимно подпружиненных пар рычагов. Каждый из этих рычагов щарнирно закреплен на соответствующей плате станины, а рабочие элементы их установлены соосно один другому по линии зазора 9 в носледовательности, определяемой технологическим процессом сборки. Транспортирующий механиз-м 6 выполнен в виде замкнутого конвейера с последовательно закрепленными иа нем толкателями 12, установленными по линии зазора 9 и взаимодействующими с первой по ходу своего движения деталью. Механизм 8 фиксирования представляет собой механизм свинчивания и выполнен в виде взаимно подпрулшненных рычагов 13 и 14, каждый из которых закреплен на соответствующей плате станины и снабжен свободно вращающимся роликом 15, взаимодействующим с одной из свинчиваемых деталей и обеснечиваюодим вращ,ение этой детали при ее перемещении.
Ыа конвейере перед толкателем 12 по ходу его движения закреплен выбрасыватель 16, выполненный в виде стержня, расположенного оси рабочих элементов захватных приспособлений и взаимодействующего с собранной ручкой при изменении траектории своего движения.
Описываемое устройство работает следующим образом.
Подающими механизмами (пе показаны) в захватные приспособления 2-5 подаются соответственно ампула, пружина, декоративное кольцо и ствол шариковой ручки, а в 17 толкателя 12 - колпачок.
:При движении конвейера колпачок открытымкйнцом захватывает один конец ампулы, передвигает .ее до места ориентации пружины и надевает на другой конец ампулы. Одновременно толкатель 12 раздвигает рычаги приспособлений 2 W. 3, 1 на колпачок надевается декоративное кольцо, а ствсл надевается на ампулу с пружиной. При соприкосновении колпачка со стволом последний контактирует с .роликом 15 и начинает вращаться. Колпачок же в вырезе 17 толкателя 12 не может вращаться, в результате этого ствол свинчивается с колпачком. При подходе толкателя 12 с собранной ручкой к приводу 7 выбрасыватель 16 своим стержнем выбрасывает собранну о ручку из толкателя.
Предмет изобретения
1. Устройство для сборки щариковых ручек, содержащее станину, захватные приспособления с рабочими элементами но форме удерживаемых ими деталей ручки, транснортирующий механизм с приводом и механизм фиксирования собранных деталей, отличающееся тем, что, с целью повыщения производительности сборки, станина выполнена в виде двух установленных с зазором плат, захватные приспособления выполнены в виде взаимно подпрул иненных пар рычагов, каждый из которых щарнирно закреплен на соответствующей
5 плате станины и рабочие элементы которых установлены соосно один другому по линии зазора в последовательности, определяемой технологическим процессом сборки, транспортирующий механизм выполнен в виде замкку0 того конвейера с последовательно закрепленными на нем толкателями, установленны.ми по линии зазора и пзаимодействующими с первой по ходу своего двилсения деталью.
2.Устройство по п. 1, отличающееся тем, что механизм фиксирования собранных деталей представляет собой механизм свинчивания и выполнен в виде взаимно подпружиненных рычагов числом не менее двух, каждый из которых закреплен на соответствующей плате станины и снабжен свободно вращающимся роликом, взаимодействующим с одной из свинчиваемых деталей, обеспечивая вращение этой детали при ее перемещении.
3.Устройство по ПП. 1 и 2, отличающееся тем, что на конвейере перед толкателем по ходу его закреплен выбрасыватель, выполненный в виде стерл ня, расположенного нилче оси рабочих элементов захватйых приспособлений и взаимодействующего с собранной ручкой при изменении траектории своего .
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО Д^!Я СБОРКИ ДЕТАЛЕЙ ТИПА ВАЛИК—ВТУЛКАсс:.ооюг«АЯ I Г1ШТ14ч-ШГ«5:ШЯ ЬИБЛИО'ЕКА | 1970 |
|
SU282041A1 |
| УСТРОЙСТВО для СБОРКИ ШАРИКОВЫХ РУЧЕК | 1970 |
|
SU283857A1 |
| Автомат для сборки шариковых авторучек | 1979 |
|
SU859215A2 |
| Автомат для сборки шариковых авторучек | 1978 |
|
SU766901A1 |
| Автомат для сборки шариковых ручек | 1980 |
|
SU903222A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ ОПОК В ВЕРТИКАЛЬНОЙ СТОПКЕ | 1992 |
|
RU2060856C1 |
| Установка для сварки | 1990 |
|
SU1812036A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Отрезной станок для удаления литников и промывников с отливок типа ручек | 1987 |
|
SU1507534A1 |
| МНОГОПОЗИЦИОННЫЙ АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1972 |
|
SU435915A1 |
/7 Г2 2
6 2
/J //
