Известно устройство для сборки шариковых ручек, содержащее держатель колпачка ручки и механизм свинчивания колпачка с корпусом, приводимый в движение электродвигателем.
Предлагаемое устройство позволит автоматизировать процесс. Достигается это тем, что оно снабжено механизмом транспортировки корпусов ручек, выполненным в виде барабана, взаимодействующего с храповым механизмом и имеющего продольные лазы для приема iKOipinycos ручек из магазина ит|ра;напартирования их, механизмом отсекателя стержней ручек и вибробункером для колпачков. Каждый механизм приводится в движение от кулачкового распределительного вала. Механизм свинчивания выполнен в виде патрона, установленного с возможностью поворота вокруг осн посредством рейки н косозубого колеса и имеющего гильзу, внутри которой установлен щпиндель, снабженный на одном конце втулкой для захвата колначка, а на другом имеет коническую зубчатую полумуфту, взаимодействующую со шпиндельной бабкой, получающей возвратно-поступательное движение от качающегося рычага.
Кроме этого, механизм отсекателя выполнен в виде шибера с пазом для захвата стержней и взаимодействует с распределительным валом посредством рычага. Механизм подачи стержня выполнен в виде рейки, взаимодействующей с рычагом, несущей на конце зубчатый сектор.
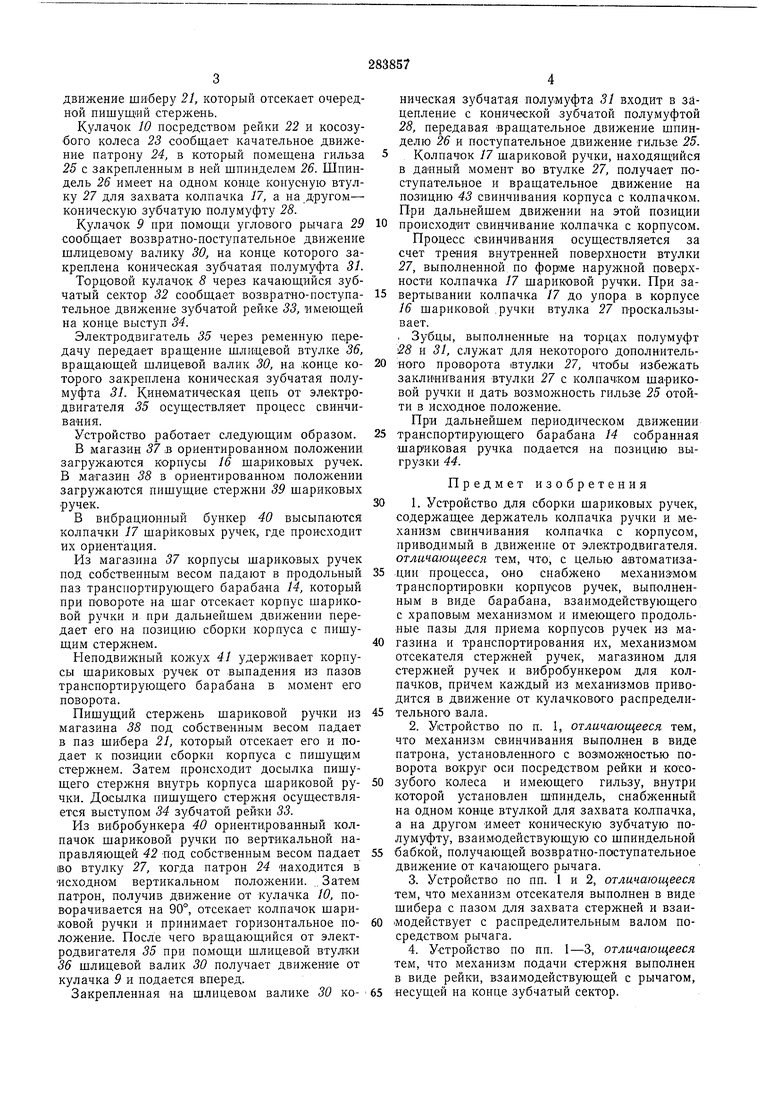
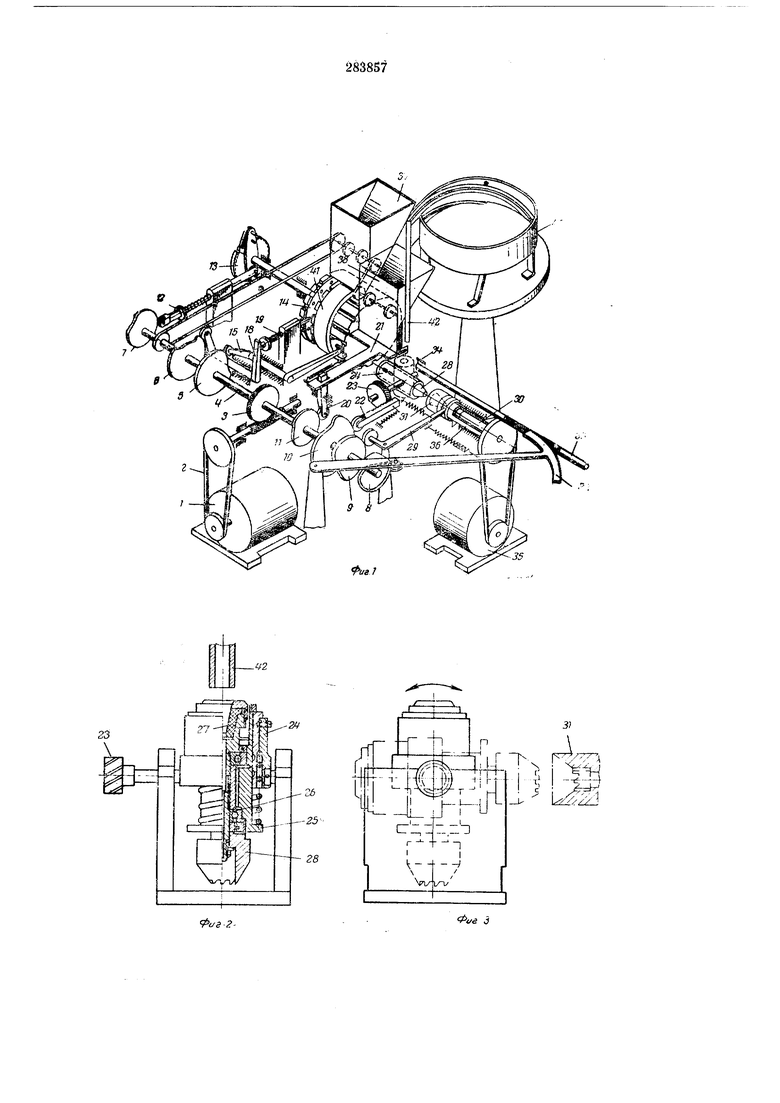
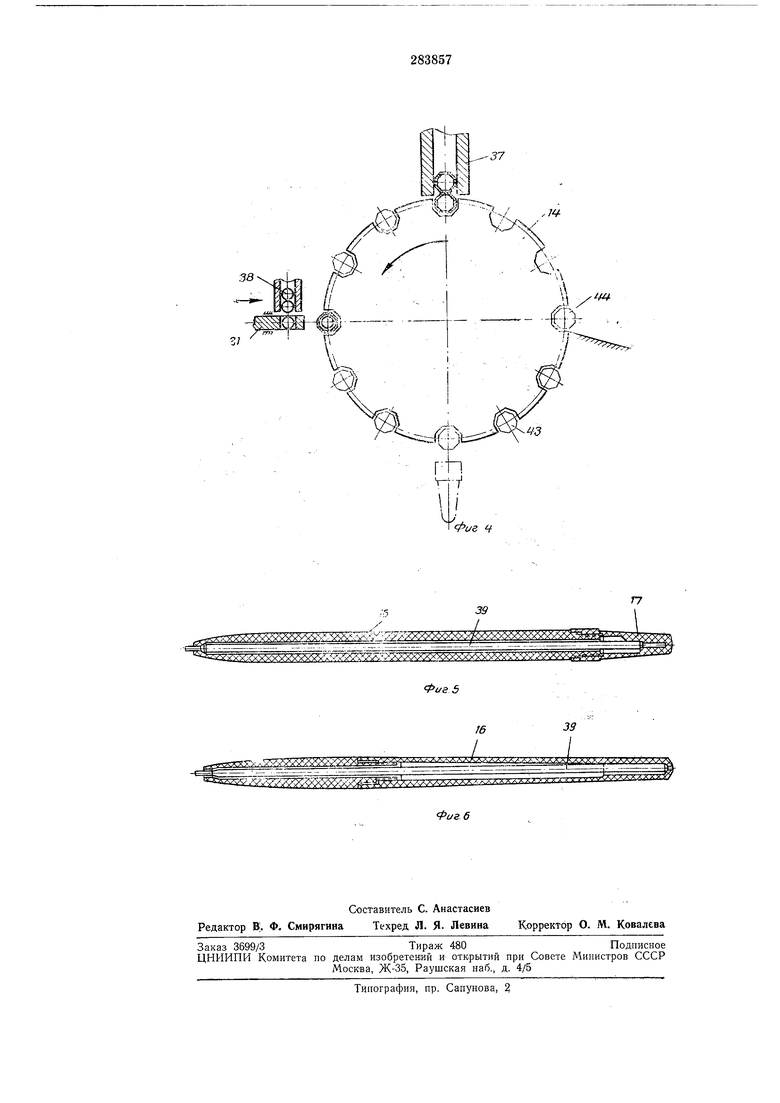
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - меха5 низм свинчивания, вид спереди; на фиг. 3 - то же, вид сбоку; на фиг. 4 - технологическая схема сборки; «а фиг. 5 - изделие, собираемое на предлагаемом устройстве; на фиг. б - то же, другой вариант.
0 Устройство содерлсит электродвигатель /, который через ременную передачу 2 и червячную передачу 3 приводит во вращение распределительный вал 4 с расположенными на нем кулачками 5, 6, 7, 8, 9, 10, 11, которые осуществляют автоматическое управление всеми механизмами устройства.
Кулачок 7 посредством толкача 12 -и храпового механизма 13 сообщает движение транспортирующему барабану 14, имеющему расположенные по окружности открытые продольные пазы по форме корпуса шариковой ручки.
Кулачок 5 при помощи качающегося рычага 15 прижимает корпус 16 шариковой ручки
5 в момент заворачивания колпачка 17.
Кулачок 6 качающимся рычагом 18 приводит в движение фиксатор 19, который фиксирует транспортирующий барабан. Кулачок И при помощи качающегося рыдвижение шиберу 21, который отсекает очередной пишущий стержень.
Кулачок 10 посредством рейки 22 и косозубого колеса 23 сообщает качательное движение патрону 24, в который помещена гильза 25 с закрепленным в ней щпинделем 26. Шпиндель 26 имеет на одном конце конусную втулку 27 для захвата колпачка 17, а на другом- коническую зубчатую полумуфту 28.
Кулачок 9 при помощи углового рычага 29 сообщает возвратно-поступательное движение щлицевому валику 30, на конце которого закреплена коническая зубчатая полумуфта 31.
Торцовой кулачок 8 через качающийся зубчатый сектор 32 сообщает возвратно-поступательное движение зубчатой рейке 33, имеющей на конце выступ 34.
Электродвигатель 35 через ременную пе,редачу передает вращение щлицевой втулке 36, вращающей щлицевой валик 30, на .конце которого закренлена коническая зубчатая полумуфта 31. Кинематическая цепь от электродвигателя 35 осуществляет процесс свинчивания.
Устройство работает следующим образом.
В магазин 37 в ориентированном положении загружаются корпусы 16 щариковых ручек. В магазин 38 в ориентированном полол ении загружаются пищущие стержни 39 щариковых ручек.
В вибрационный бункер 40 высыпаются колпачки 17 щариковых ручек, где происходит их ориентация.
Из магазина 37 корпусы щариковых ручек под собственным весом падают в продольный паз транспортирующего барабана 14, который при повороте на щаг отсекает корпус шариковой ручки и при дальнейщем движении передает его на позицию сборки корпуса с пищущим стержнем.
Неподвижный 41 удерживает корпусы щариковых ручек от выпадения из пазов транспортирующего барабана в момент его поворота.
Пишущий стержень щариковой ручки из магазина 38 под собственным весом падает в паз шибера 21, который отсекает его и подает к позиции сборки корпуса с пищущим стержнем. Затем происходит досылка нищущего стержня внутрь корпуса щариковой ручки. Досылка пишущего стержня осуществляется выступом 34 зубчатой рейки 35.
Из вибробункера 40 ориентированный колпачок щариковой ручки по вертикальной направляющей 42 под собственным весом падает IBO втулку 27, когда патрон 24 находится в ИСХОДНОМ вертикальном положении. ,. Затем патрон, получив движение от кулачка 10, поворачивается на 90°, отсекает колпачок щариковой ручки и принимает горизонтальное ноложение. После чего вращающийся от электродвигателя 35 при помощи щлицевой втулки 36 щлицевой валик 30 получает движение от кулачка 9 и нодается вперед.
ническая зубчатая нолумуфта 31 входит в зацепление с конической зубчатой полумуфтой 28, передавая вращательное движение шпинделю 26 и поступательное движение гильзе 25. Колпачок 17 шариковой ручки, находящийся в данный момент во втулке 27, получает поступательное и вращательное движение на позицию 43 свинчивания корпуса с колпачком. При дальнейщем движении на этой позиции
происходит свинчивание колпачка с корпусом. Процесс свинчивания осуществляется за счет трения внутренней поверхности втулки 27, выполненной по форме нарулсной поверхности колпачка 17 щариковой ручки. При завертывании колпачка /7 до упора в корпусе 16 щариковой .ручки втулка 27 проскальзывает.
. Зубцы, выполненные на торцах полумуфт 28 и 31, служат для некоторого дополнительного проворота йтулки 27, чтобы избежать заклинивания втулки 27 с колпачком щариковой ручки и дать возможность гильзе 25 отойти в исходное положение. При дальнейщем периодическом движении
транспортирующего барабана 14 собранная щариковая ручка подается на позицию выгрузки 44.
Предмет изобретения
1. Устройство для сборки щариковых ручек, содержащее держатель колпачка ручки и механизм свинчивания колпачка с корпусом, приводимый в движение от электродвигателя. отличающееся тем, что, с целью автоматизации процесса, оно снабжено механизмом транспортировки корпусов ручек, выполненным в виде барабана, взаимодействующего с храповым механизмом и имеющего продольные пазы для приема корпусов ручек из магазина и транспортирования их, механизмом отсекателя стержней ручек, магазином для стержней ручек и вибробункером для колпачков, причем каждый из механизмов приводится в движение от кулачкового распределительного вала.
2.Устройство по п. 1, отличающееся тем, что механизм свинчивания выполнен в виде патрона, установленного с возможностью поворота вокруг оси посредством рейки и косозубого колеса и имеющего гильзу, внутри которой установлен шниндель, снабженный на одном конце втулкой для захвата колпачка, а на другом имеет коническую зубчатую нолумуфту, взаимодействующую со щпиндельной
бабкой, получающей возвратно-поступательное движение от качающего рычага.
3.Устройство по пп. 1 и 2, отличающееся тем, что механизм отсекателя выполнен в виде шибера с пазом для захвата стержней и взаимодействует с распределительным валом посредство М рычага.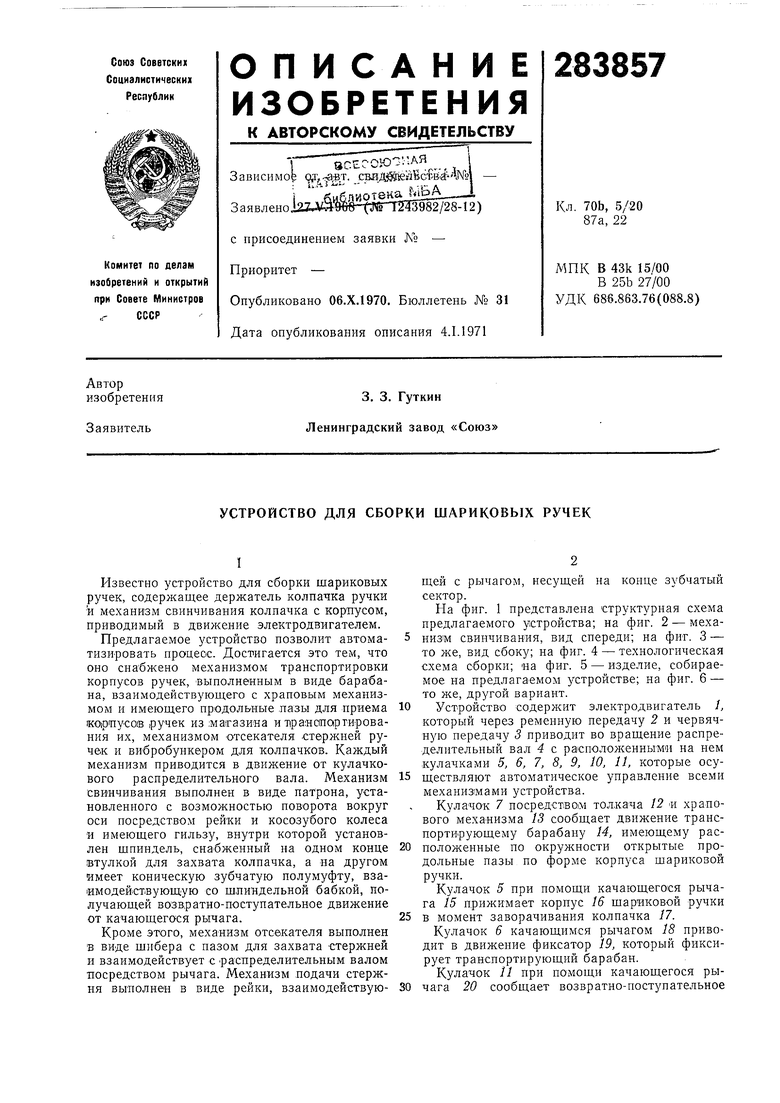
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки шариковых авторучек | 1978 |
|
SU766901A1 |
| Автомат для сборки шариковых авторучек | 1979 |
|
SU859215A2 |
| УСТРОЙСТВО для СБОРКИ ШАРИКОВЫХ РУЧЕК | 1970 |
|
SU277581A1 |
| Приспособление к многошпиндельному токарному полуавтомату для автоматической установки в патрон я съема заготовок подшипниковых колец | 1951 |
|
SU95385A1 |
| Автомат для сборки шариковых ручек | 1983 |
|
SU1139644A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| РУЧНОЙ МНОГОЗАРЯДНЫЙ ГРАНАТОМЕТ | 2013 |
|
RU2526728C1 |
| ПИШУЩИЙ ИНСТРУМЕНТ | 2019 |
|
RU2726876C1 |
| Коляска для инвалидов | 1988 |
|
SU1641331A1 |
| Устройство для автоматической сборки плавких предохранителей | 1977 |
|
SU681475A1 |
-2
Фиг-г31
A
bii
Ttl 1 t,
r
i г т
u
I i-
-O:-3
CTII
k - i - -T
А/й j
.14.J
Фие ч
Г7
39
J
