Изобретение относится к гидроцилиндрамлатчикам, применяемым в следящих устройствах для управления силовыми цилиндрами рабочего оборудования, например экскаватора.
Известно гидравлическое следящее устройство для управления силовыми цилиндрами рабочего оборудования, включающее шарнирно соединенные рычаги управления и датчики с корпусом и поршнем.
Однако это устройство не обеспечивает постоянства чувствительности следящей системы и точности управлеиия рабочим органом, в частности, при перемещении его по нужной траектории. Это происходит потому, что перемещение порщця его не пропорционально углу поворота рычага.
Целью изобретения является иовыщение точности управления рабочим оборудованием.
Это достигается тем, что поршень датчика на части длины вынолнен с винтовой нарезкой, взаимодействующей с винтом поводка, жестко соединенного с одним из рычагов управления. Последний перемещается относительно корпуса, жестко соединенного, в свою очередь, с другим рычагом управления.
Поводок молсет быть выполнен с подпружиненным фиксатором, входящим в отверстие шарнира, соединяющего рычаги управления.
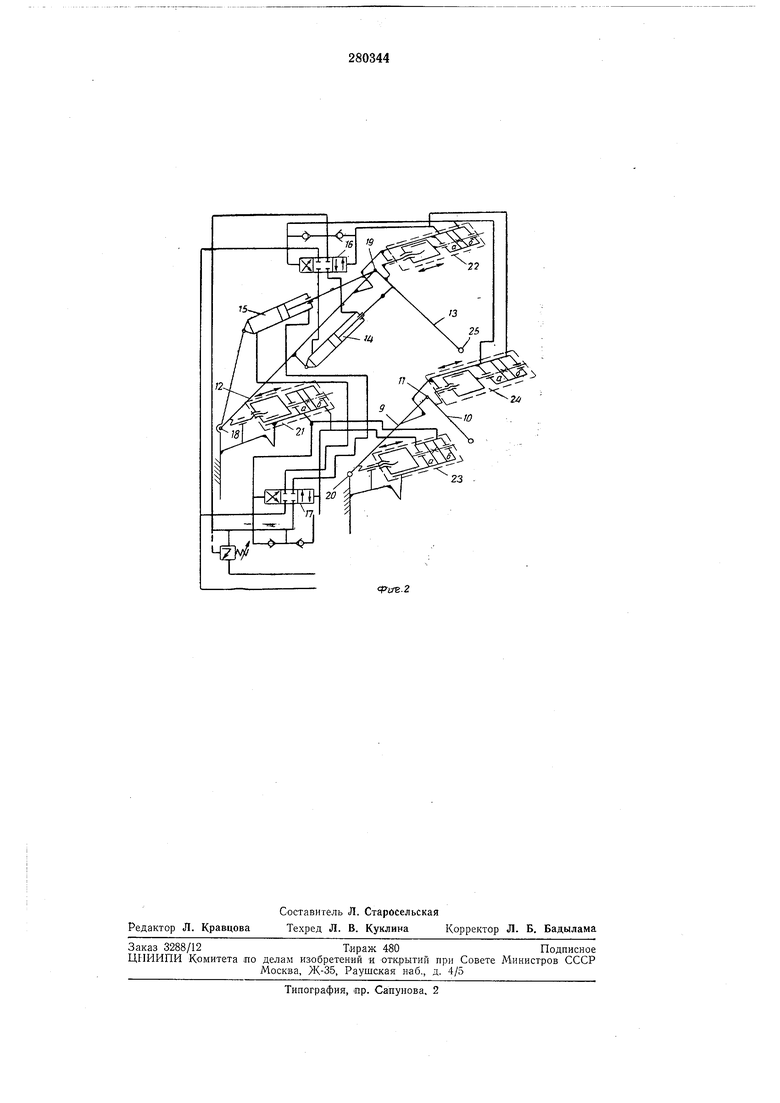
фиг. 2 представлена кинематическая схема устройства.
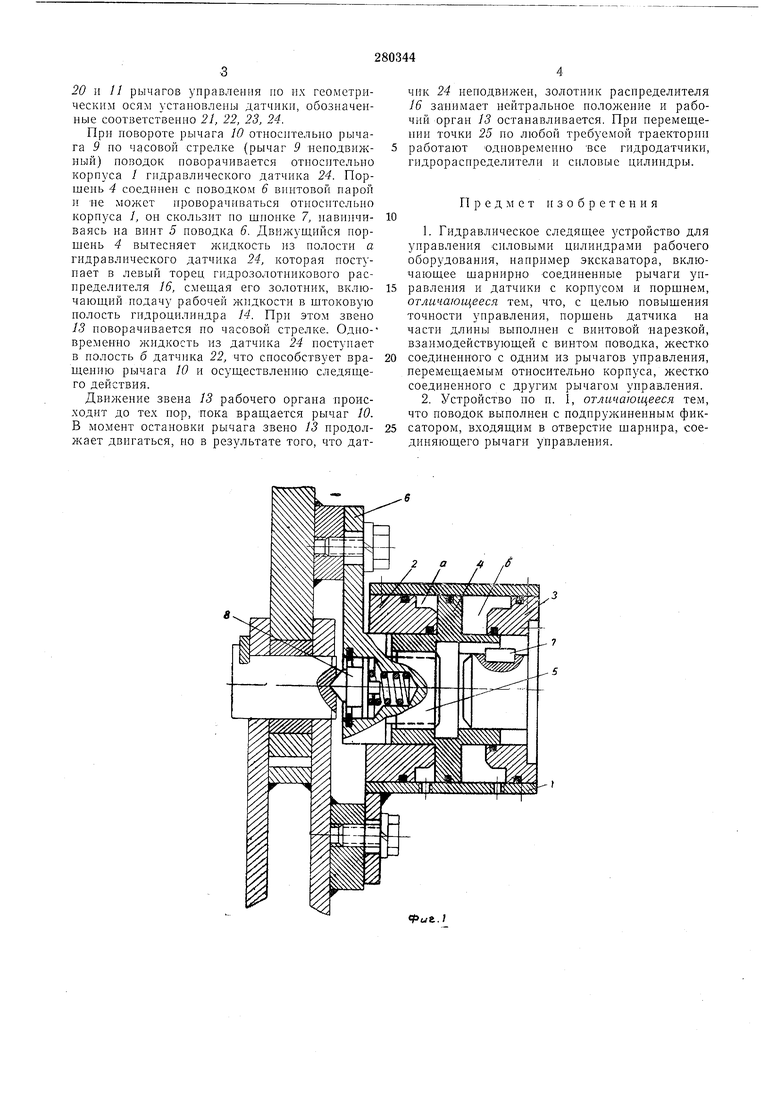
Устройство содержит корпус / датчика с крышками 2 и 3, в которых смонтирован поршень 4, на части длины выполненный с винтовой парезкой, взаимодействующей с винтом
5поводка 6. На другой части поршня 4 имеется направляющий паз (или шлицы), взаимодействующий со щпонкой 7 крышки 3, предотвращающей проворот поршня относительно корпуса / и крышек 2 и 3. Поршень 4 с крышками образует полости а п б, к которым подводится рабочая жидкость. В поводке
6по оси винта 5 вмонтирован иоднружиненный фиксатор 8. При установке датчика на
рычагах 9 и W управления фиксатор в.ходит в центровое отверстие пальца шарнира 11, соединяющего рычаги управления, что обеспечивает точность и простоту установки датчика по геометрической оси шарнира. При установке датчика к одному из рычагов управления неподвижно крепится болтом поводок 6, а к другому - корпус 1. Устройство включает также стрелу рабочего оборудования, состоящую из шарнирно сочлененных звеньев 12 п 13 н шарнирно сочлецепных рычагов 9 и 10 управления. Стрела рабочего оборудования управляется гидроцилппдрами 14 и 15 и гидрозолотниковыми рас20 и 11 рычагов управления по их геометрпческим осям установлены датчики, обозначенные соответственно 21, 22, 23, 24.
При повороте рычага 10 относительно рычага 9 но часовой стрелке (рычаг 9 ненодвижный) поводок поворачпвается относптельно корпуса / гидравлического датчика 24. Поршень 4 соединен с поводком 6 впптовой парой и Tie может проворачиваться отиосительно корнуса /, он скользит по шпопке 7, навппчиваясь на винт 5 поводка 6. Движущийся поршень 4 вытесняет жидкость из полости а гидравлического датчика 24, которая поступает в левый торец гидрозолотникового распределителя 16, смешая его золотник, включаюгцнй подачу рабочей жидкости в штоковую полость гпдроцилнндра 14. При этом звено 13 поворачивается по часовой стрелке. Одно-временно жидкость из датчика 24 постуиает Б полость б датчика 22, что способствует вращенпю рычага 10 и осуществлению следящего действия.
Движение звена 13 рабочего органа нроисходит до тех пор, пока вращается рычаг 10. В момент остановки рычага звено 13 продолжает двигаться, но в результате того, что датчик 24 иеподвижеи, золотник распределителя 16 занимает нейтральное ноложение и рабочий орган 13 останавливается. При перемещении точки 25 по любой требуемой траектории работают одповремеино все гидродатчнки, гидрорасиределители и силовые цилиндры.
Предмет изобретения
1.Гидравлическое следящее устройство для уиравления силовыми цилиндрами рабочего оборудования, нанример экскаватора, включающее шарнирно соединенные рычаги унравления и датчики с корпусом и норщнем, отличающееся тем, что, с целью повышения точности управления, поршень датчика части длины вынолнен с винтовой яарезкой, взаимодействующей с винтОМ поводка, жестко
соединенного с одним из рычагов управления, перемещаемым относительно корпуса, жестко соединенного с другим рычагом управления.
2.Устройство по н. 1, отличающееся тем, что поводок выполнен с подпружиненным фиксатором, входящим в отверстие щарнира, соединяющего рычаги управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИЛОВЫМИ ЦИЛИНДРАМИ РАБОЧЕГО | 1967 |
|
SU190281A1 |
| ДЛИННОБАЗОВЫЙ ПЛАНИРОВЩИК С ГИДРОАВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ | 1966 |
|
SU183510A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1085892A1 |
| Гидросистема к транспортному агрегату с навесными орудиями для силового регулирования глубины обработки почвы | 1976 |
|
SU596179A1 |
| Почвообрабатывающее орудие | 1990 |
|
SU1792235A3 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО | 1970 |
|
SU287595A1 |
Фаг.
га
23
ffcre.2
